마스터 컨트롤 통신 구성(Elite EC)
이 부분에서는 Elite EC 로봇을 마스터 컨트롤하는 방법을 소개합니다.
사전 준비
하드웨어 및 소프트웨어 버전 확인
|
본 문서에 나열된 버전 및 모델은 적합성을 위해 엄격히 테스트되었습니다. 다른 모델과 버전의 경우, 사용자는 본 문서를 참고하여 작업을 시도할 수 있으며, 문제가 발생하면 Mech-Mind 기술 서포트팀에 문의하십시오. |
-
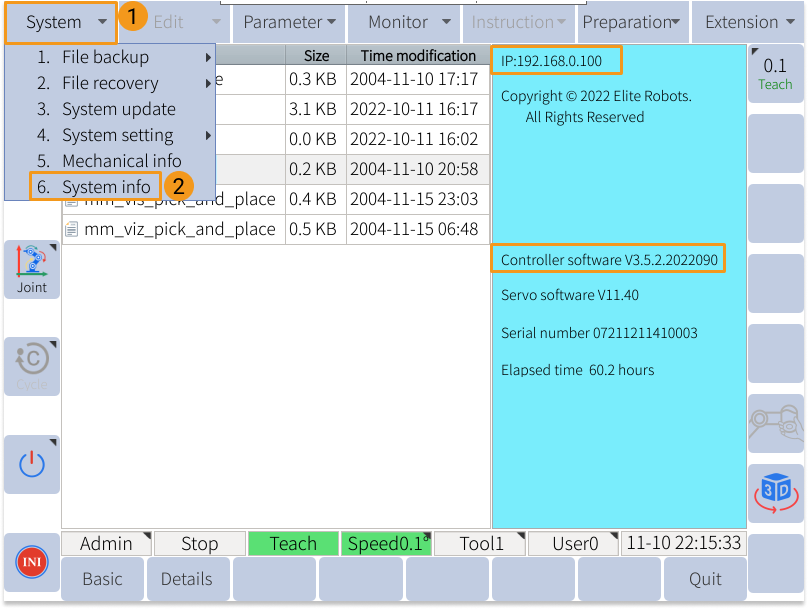
컨트롤러 버전: 3.5 .
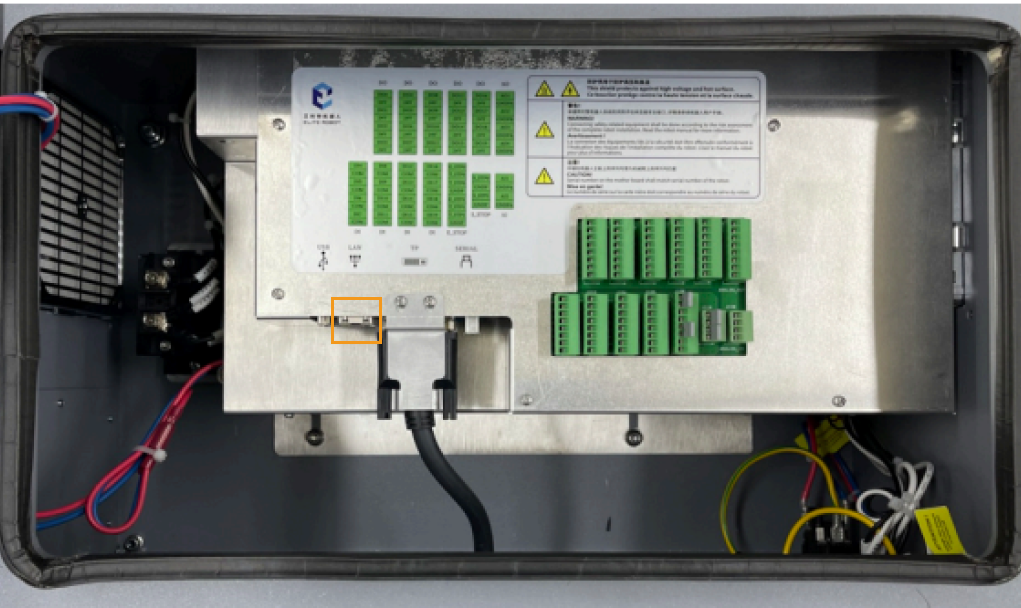
네트워크 연결 설정하기
IP 주소를 변경하기
|
아래 임의 포트의 IP 주소를 수정하며 양쪽 네트워크 포트의 IP 주소를 동일한 네트워크 세크먼트 내에 설정하십시오.
|
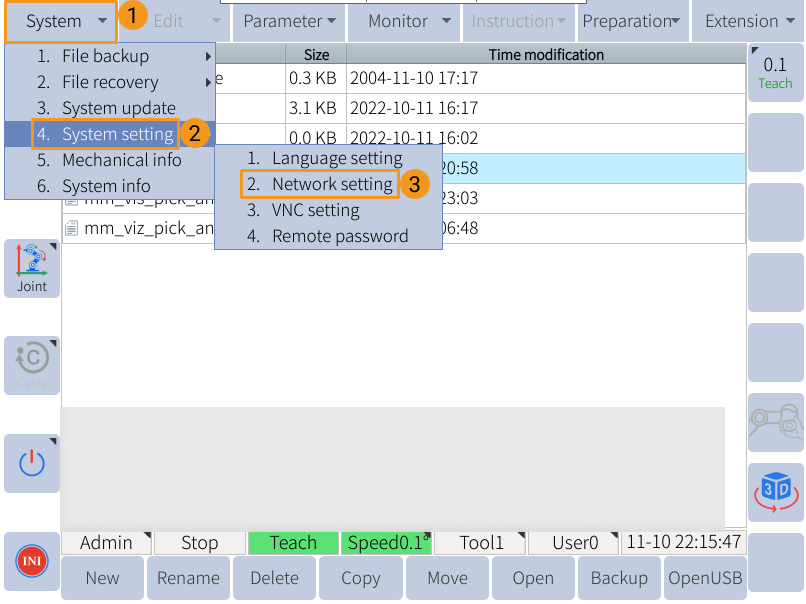
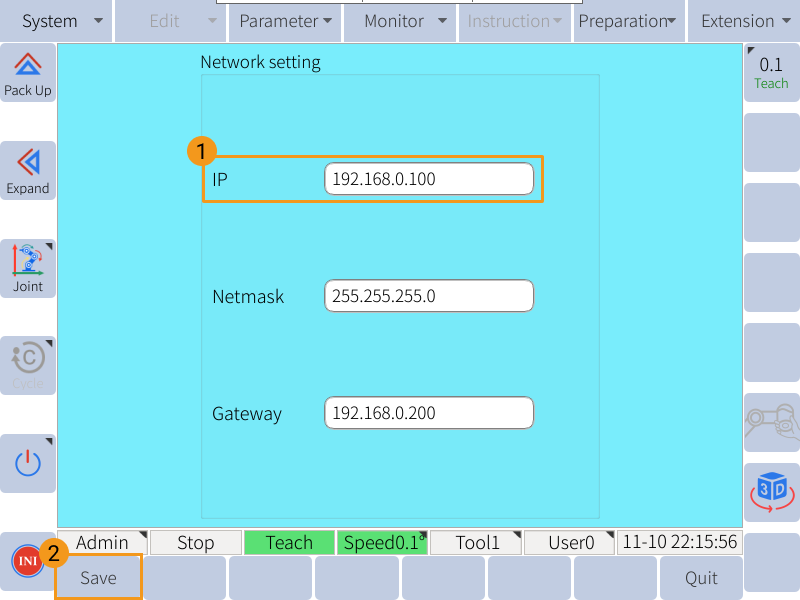
다음과 같은 스텝에 따라 로봇의 IP 주소를 변경합니다.
-
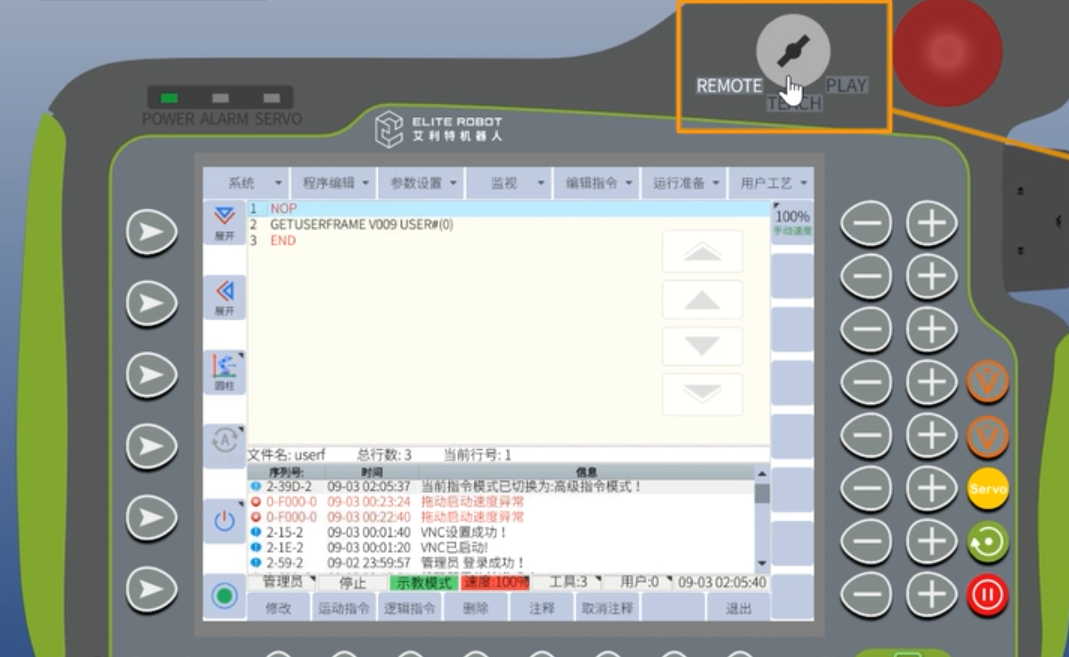
Admin 계정으로 전환하기: 키를 TEACH 로 돌려 왼쪽 하단의 계정 모드가 Admin 모드인지 확인합니다.
Admin 계정이 아닌 겨우, 해당 계정 모드를 클릭하고 Admin 를 선택한 후 계정 비밀번호(기본 비밀번호: 333333)를 입력한 다음 왼쪽 하단의 OK 버튼을 클릭하십시오.
-
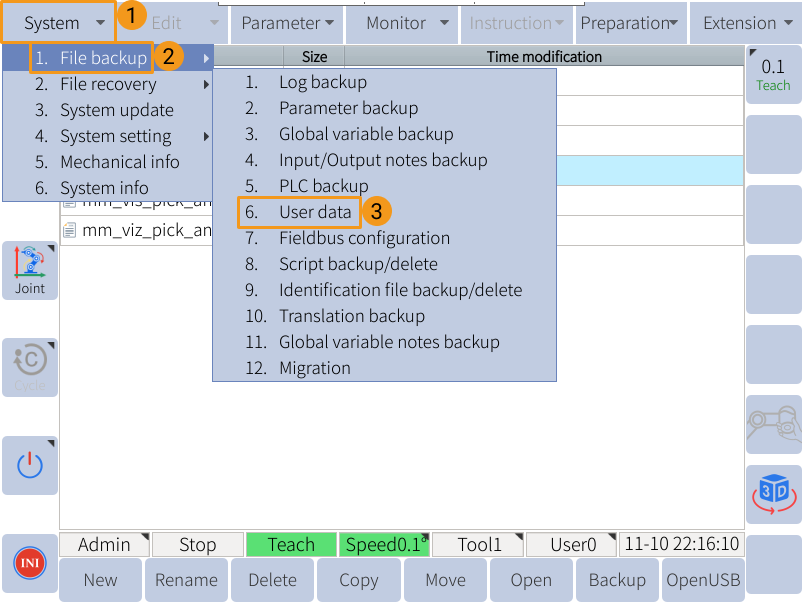
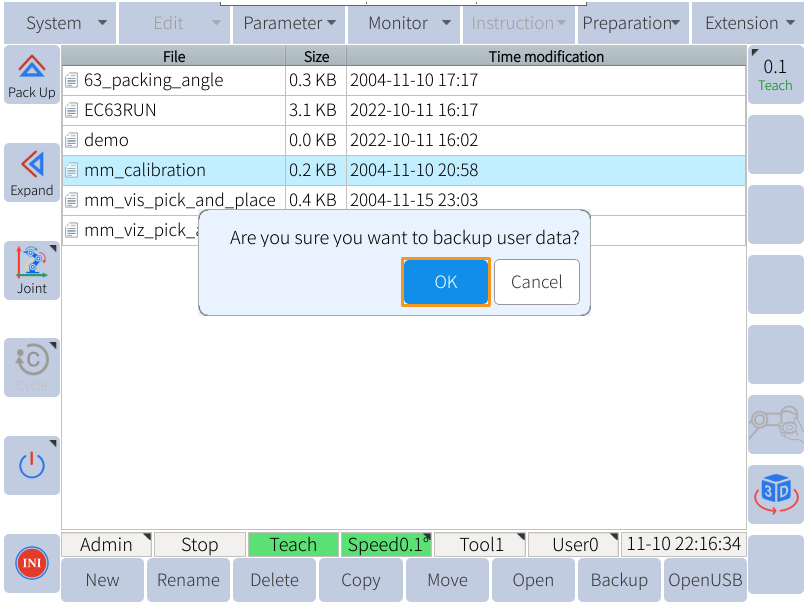
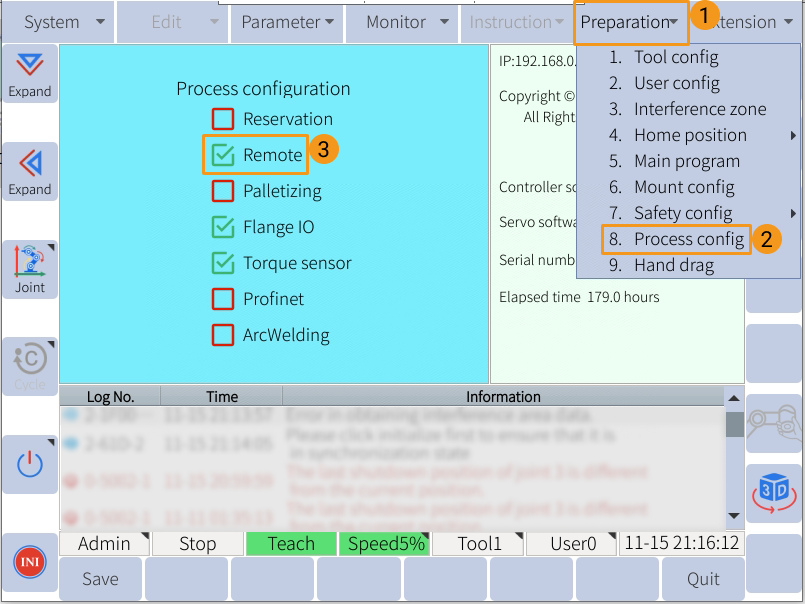
티치 펜던트에서 차례로 버튼을 클릭합니다.
-
이때 IP를 변경할 수 있으며, IP 변경 완료 후 Save 버튼을 클릭하십시오.
마스터 컨트롤 통신 테스트
Mech-Viz 프로젝트 만들기
-
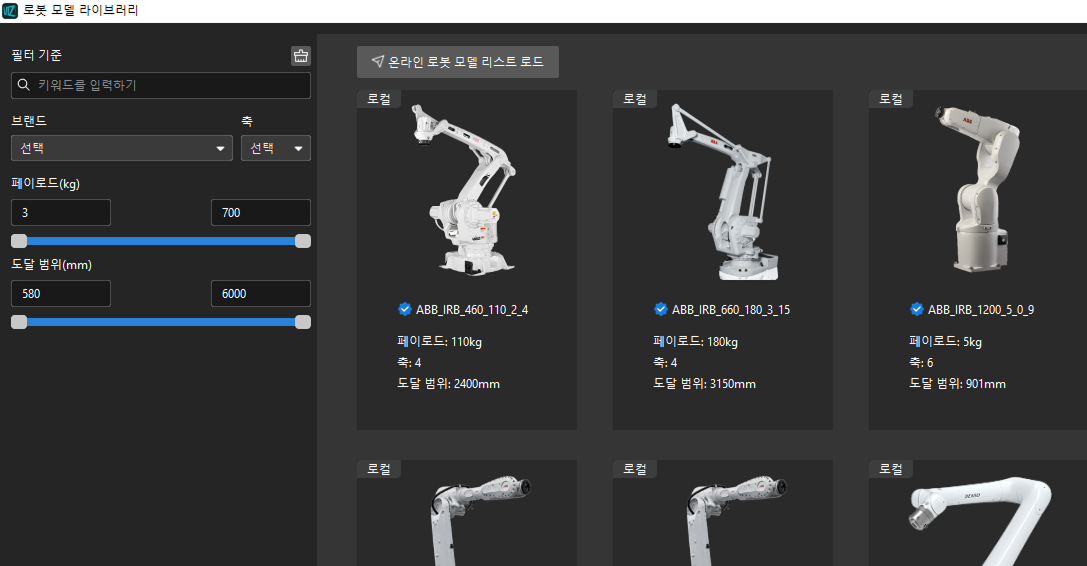
Mech-Viz 소프트웨어를 열고 키보드의 Ctrl + N(프로젝트 새로 만들기)를 누릅니다. 다음 인터페이스에서 실제 로봇의 브랜드와 모델에 따라 해당한 로봇 모델을 선택합니다.
-
키보드에 있는 Ctrl + S 버튼을 눌러 프로젝트를 저장하는 데 사용되는 폴더를 새로 만들거나 선택하십시오.
-
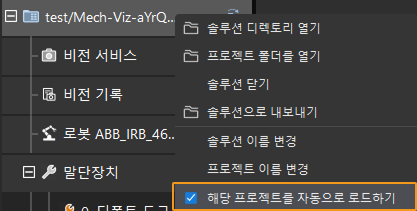
Mech-Viz 소프트웨어의 왼쪽 패널에서 프로젝트 이름을 마우스 오른쪽 버튼으로 클릭하고 *자동으로 로드되도록 설정*을 선택합니다.
로봇 연결
-
Mech-Viz 소프트웨어에서 툴 바에 있는 *로봇 마스터 컨트롤 연결*을 클릭합니다.
-
*로봇 IP 주소*에서 실제 로봇의 IP 주소(그림의 IP 주소는 예시임)를 입력하고 로봇 연결을 클릭합니다.
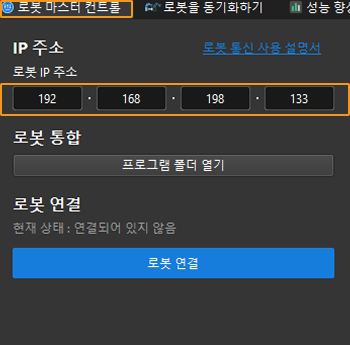
Mech-Viz에서 실제 로봇을 성공적으로 연결하면 현재 상태는 *연결됨*으로 표시되며 툴 바의 아이콘은 파란색에서 녹색으로 바뀝니다.
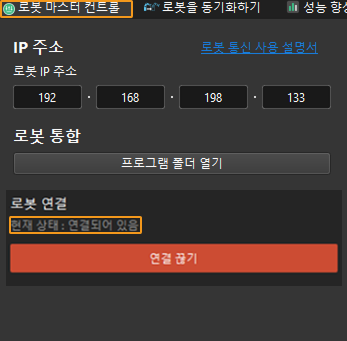
연결에 실패한 경우, 설정된 로봇 IP 주소가 잘못되었는지 확인하십시오.
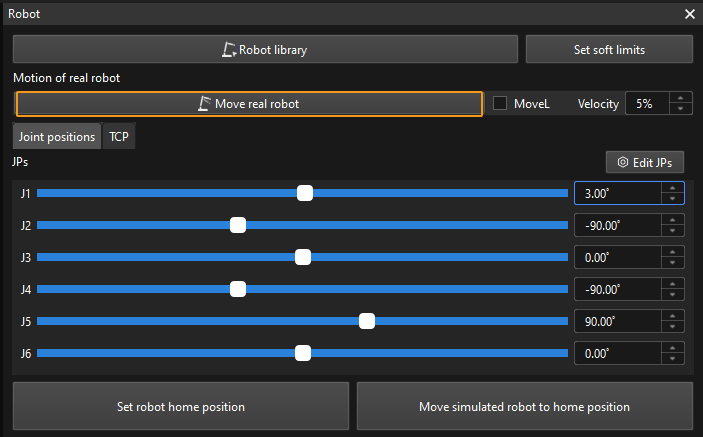
로봇을 이동하기
-
Mech-Viz 소프트웨어에서 툴 바의 속도와 가속도를 5%로 설정하십시오.

-
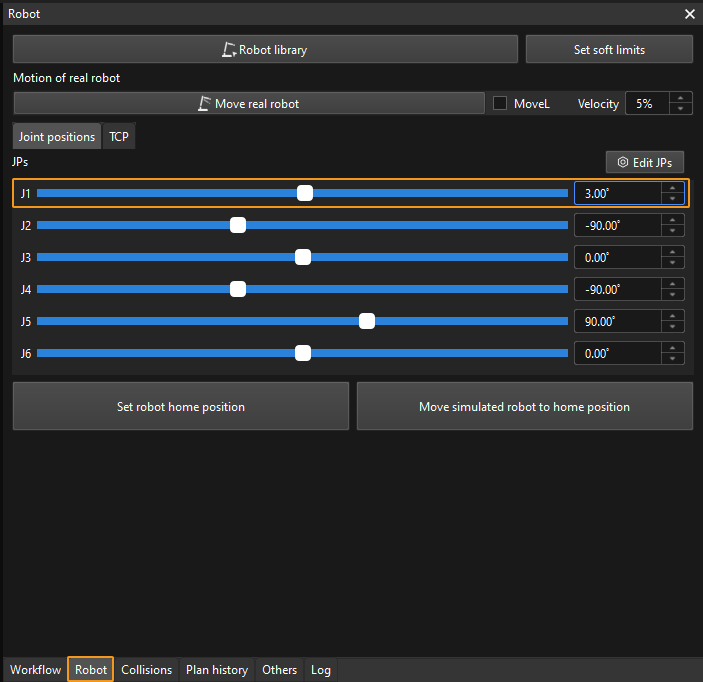
툴 바에서 *로봇을 동기화하기*를 클릭하여 선택 당한 상태를 유지하면 이때 3D 시뮬레이션 공간의 가상 로봇 포즈는 실제 로봇 포즈로 동기화되고 *로봇을 동기화하기*를 다시 클릭하여 선택 당한 상태를 취소합니다.

-
로봇 옵션에서 J1 관절 각도를 조금 조절합니다(예: 0°를 3°로 조절함). 이 작업은 가상 로봇을 이동시킵니다.
-
실제 로봇 이동을 클릭하여 실제 로봇의 이동 여부를 확인합니다. 실제 로봇이 가상 로봇의 포즈로 이동하면 마스터 컨트롤 통신이 정상임을 의미합니다.
로봇을 실행할 때 안전을 부디 주의하십시오. 비상시에는 티치 펜던트의 비상정지 버튼을 눌러주십시오.