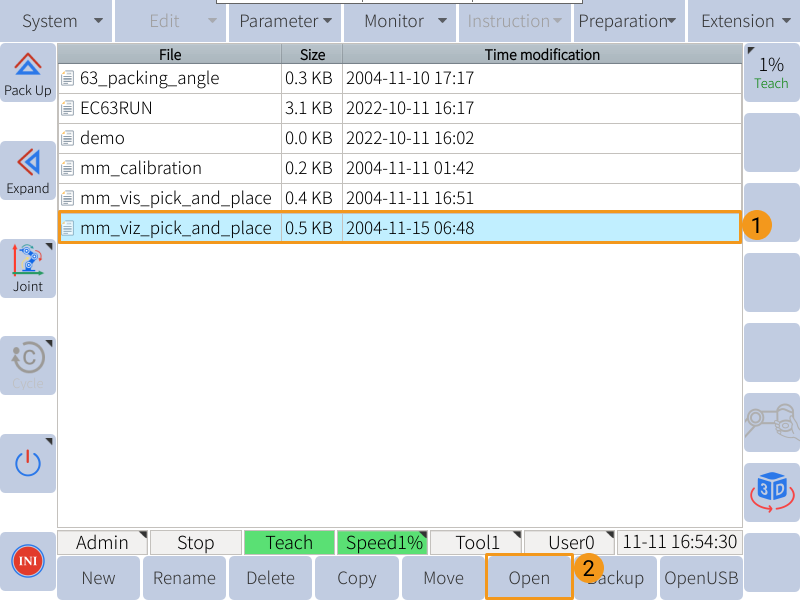
mm_viz_pick_and_place
이 예시 프로그램은 Mech-Viz 계획 경로를 트리거하고 로봇을 웨이포인트로 이동시킵니다.
|
Lua 스크립트 프로그램드은 백그라운드에서 계속 실행되며, 그렇지 않으면 로봇과 연결 못 합니다. |
프로그램 워크플로 소개
NOP
WAIT B099 = 0
SET B109 1
//run viz pose type
SET B099 4
//start viz
WAIT B099 = 0
// SET B110 1
// //set branch id
// SET B111 1
// //set branch out port
// SET B099 5
// //set branch
// WAIT B099 = 0
// SET B112 2
// //set index id
// SET B113 1
// //set index out port
// SET B099 6
// //set index
// WAIT B099 = 0
SET B114 2
// receive viz pose type
SET B099 7
// receive from viz
WAIT B099 = 0
SET B099 9
// set viz to v101-v120 p101-p120
WAIT B099 = 0
// MOVL V100 V=100MM/S CR=0.000MM
END-
3번째 줄: Mech-Viz에 보낼 포즈 유형을 현재 관절 각도및 플랜지 포즈로 지정합니다.
-
5번째 줄: Mech-Viz 프로젝트 실행을 트리거합니다.
-
8번째 줄: 프로젝트가 어떤 메시지 분기 스텝을 따라 실행될지 지정할 수 있습니다.
-
10번째 줄: 해당 메시지 분기 스텝의 아웃 포트를 설정합니다.
-
12번째 줄: Mech-Viz 프로젝트가 지정된 메시지 분기 스텝의 지정된 아웃 포트로부터 실행되도록 트리거합니다.
-
15번째 줄: 인덱스 파라미터가 있는 스텝 번호를 지정합니다.
-
17번째 줄: 인덱스 스텝의 인덱스 값을 지정합니다.
-
19번째 줄: 인덱스를 설정합니다.
-
22번째 줄: Mech-Viz에서 획득한 웨이포인트 포즈 유형을 TCP로 설정합니다.
-
24번째 줄: 계획 경로를 획득합니다.
-
27번째 줄: Mech-Viz 에서 반환된 웨이포인트 포즈는 V101-v120 변수에 저장됩니다(획득된 웨이포인트 포즈가 관절 각도인 경우 P101-P120 변수에 저장됩니다).
-
30번째 줄: 로봇을 웨이포인트로 이동시킬 수 있는 이동 명령어를 추가할 수 있습니다.
mm_viz_pick_and_place 프로그램 실행하기
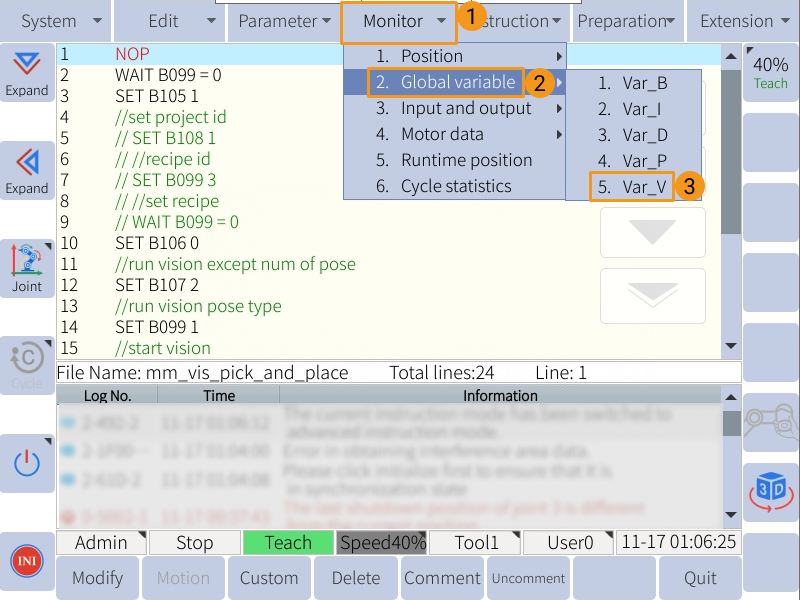
변수 열기
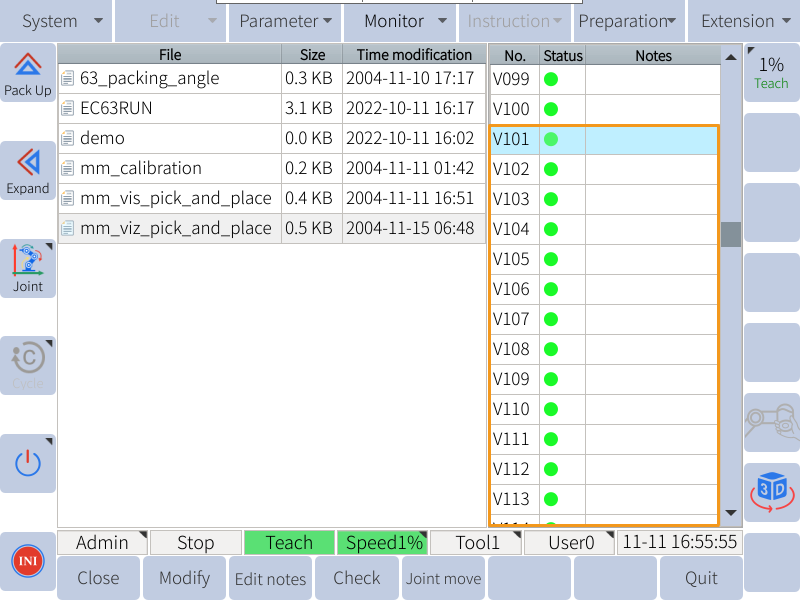
Mech-Viz에서 획득한 포즈가 V101-V120 변수(TCP인 경우) 또는 P101-P120 변수(관절 각도인 경우)에 저장되므로, 먼저 다음 스텝을 따라 V101-V120 및 P101-P120의 40개 변수를 모두 켜십시오.
-
차례로 티치 펜던트에서 를 클릭하십시오.
메시지 표시줄 아이콘이 녹색으로 표시되면 켜짐을 나타내고 빨간색은 켜지지 않았음을 나타냅니다. 변수가 열리지 않으면 변수를 선택하고 화면 왼쪽 하단의Open 버튼을 클릭합니다.
-
마찬가지로, 차례로 티치 펜던트에서 를 클릭하고 P101-120변수를 모두 켜십시오.
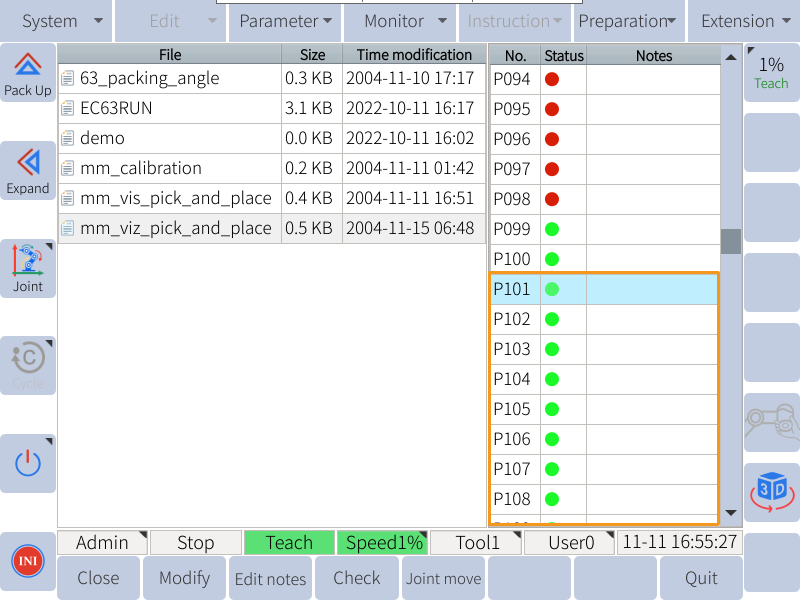
-
화면 오른쪽 하단의 Quit 버튼을 클릭하여 메인 화면으로 돌아갑니다.