마스터 컨트롤 통신 구성 (DOBOT CR)
본 절에서는 Mech-Mind 비전 시스템과 DOBOT CR 시리즈 로봇 간의 마스터 통신을 구성하는 방법을 설명합니다.
사전 준비
컨트롤러 및 소프트웨어 버전 확인
|
본 문서에 나열된 버전 및 모델은 적합성을 위해 엄격히 테스트되었습니다. 다른 모델과 버전의 경우, 사용자는 본 문서를 참고하여 작업을 시도할 수 있으며, 문제가 발생하면 Mech-Mind 기술 서포트팀에 문의하십시오. |
-
컨트롤러 버전: 3.5.2 또는 3.5.6.
네트워크 연결 설정하기
하드웨어 연결하기
네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고, 다른 쪽 끝을 로봇 컨트롤러 캐비닛 뒤면의 LAN 네트워크 포트에 삽입하십시오.
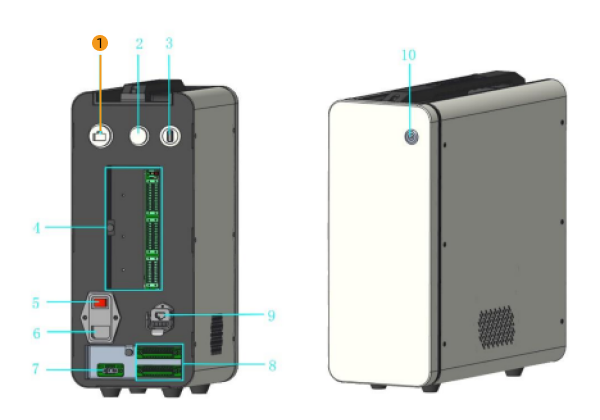
① LAN 네트워크 포트 표시됩니다.
IP 주소 설정하기
로봇의 IP 주소와 IPC의 IP 주소는 동일한 네트워크 세그먼트에 있어야 합니다. 즉, 두 IP 주소의 네트워크 부분과 서브넷 마스크가 동일해야 합니다. 예를 들어, 192.168.100.2/255.255.255.0 및 192.168.100.3/255.255.255.0은 동일한 네트워크 세그먼트에 있습니다.
-
IPC의 IP 주소 설정합니다.
-
로봇 IP 주소를 설정합니다.
-
로봇 제어 소프트웨어가 DobotSCStudio인 경우 다음과 같이 IP 주소를 설정합니다.
DobotSCStudio에서 차례로 버튼을 클릭하십시오.
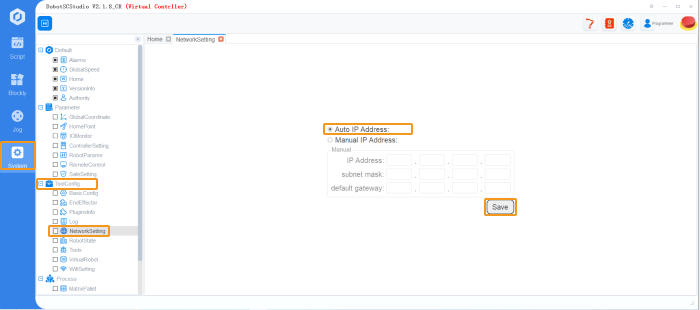
로봇 IP와 IPC IP가 동일한 네크워크 세그먼트에 있지 않는 경우 Manual IP Address 를 선택하여 로봇 IP를 수동으로 설정한 후 저장합니다. -
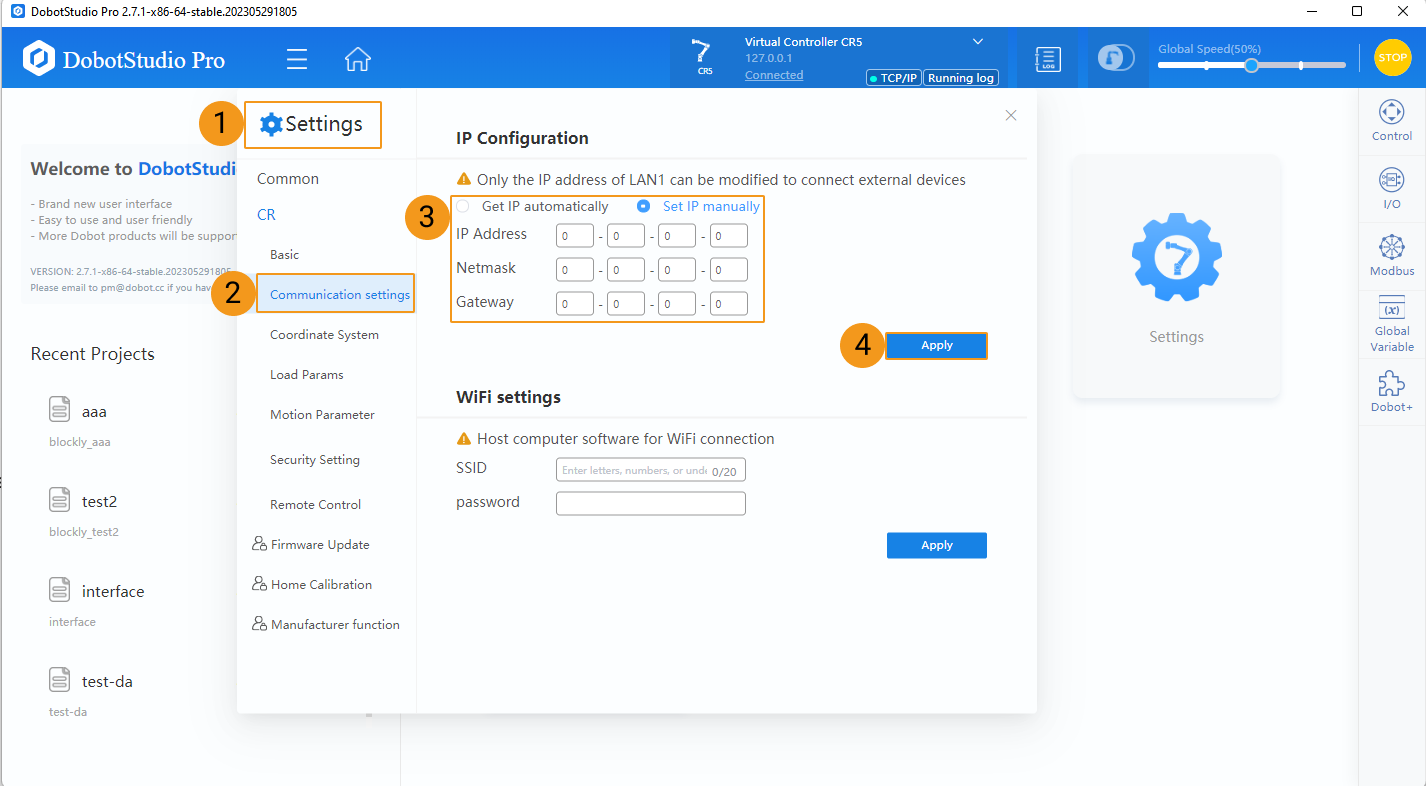
로봇 제어 소프트웨어가 DobotStudio인 경우 다음과 같이 IP 주소를 설정합니다.
DobotStudio에서 차례로 버튼을 클릭하여 IP 주소, 서브넷 마스크, 기본 게이트웨이 입력한 다음 Apply 버튼을 클릭하십시오.
-
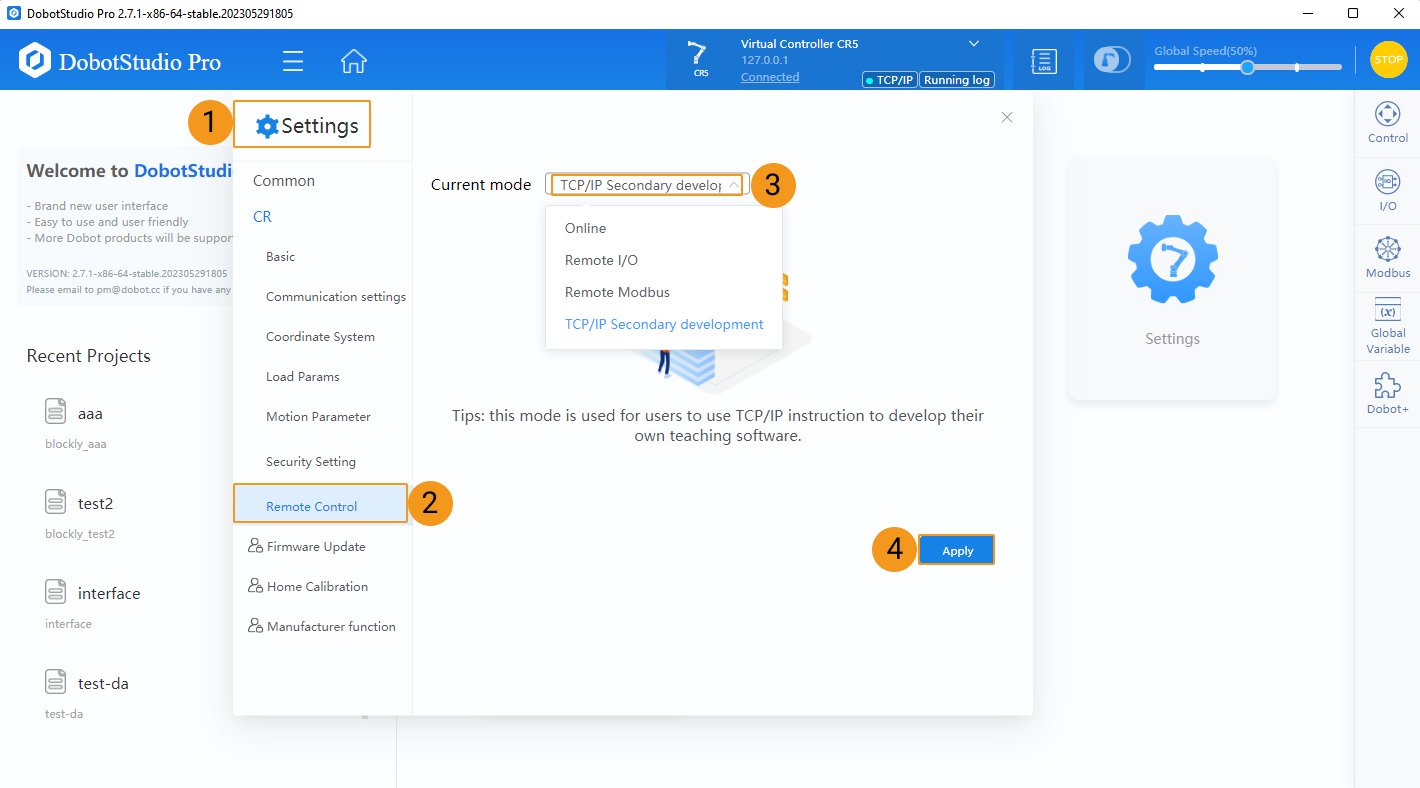
로봇을 원격 제어 모드로 전환하기 (DobotStudio 소프트웨어만 적용)
DobotStudio에서 차례로 버튼을 클릭하여 Current mode 에서 TCP/IP Secondary development,선택한 다음 Apply 버튼을 클릭하십시오.
주의사항
-
Mech-Viz 와 DobotSCStudio/DobotStudio 동시에 사용하지 마십시오. 그렇지 않으면 Mech-Viz 가 로봇과 통신이 되지 않을 수 있습니다.
-
Mech-Viz 와 티치 펜던트를 동시에 사용하여 로봇을 조작하지 마십시오.
-
컨트롤러에 연결된 Wi-Fi USB 장치는 원격 제어에 영향을 줄 수 있으므로 제거하는 것이 좋습니다.
-
DOBOT 로봇을 마스터 컨트롤할 때 프로그램 실행 중 Mech-Viz 는 로봇 TCP 설정을 지원하지 않습니다. 따라서 사용자는 사전에 로봇 측의 TCP 값과 Mech-Viz 에 설정된 TCP 값이 일치하는지 확인해야 합니다. 만약 두 값이 일치하지 않으면, 실제 로봇의 직선 운동 경로와 Mech-Viz 에서 계획한 경로가 일치하지 않게 됩니다. 사용자는 두 TCP 값을 일치시키기 위해 다음과 같이 조작할 수 있습니다.
-
로봇 측의 TCP 값을 Mech-Viz 에서 설정한 TCP 값과 일치하도록 수동으로 수정합니다;
-
로봇을 활성화합니다;
-
Mech-Viz 로봇 재연결합니다.
-
-
DOBOT로봇의 실제 DI 신호와 Mech-Viz 중의 DI 신호 간에 1비트 오프셋이 존재합니다. 즉, Mech-Viz 의 DI0은 실제 로봇의 DI1에 대응됩니다.
-
로봇이 이동 중 갑자기 정지하는 경우, 케이블이 로봇 암에 감고, 안전 스킨(SafeSkin)이 활성화되어 로봇이 충돌을 감지하여 움직임을 멈출 수 있습니다. 안전 스킨을 비활성화하여 오검출되는 충돌 감지를 해결할 수 있습니다.
마스터 컨트롤 통신 테스트
Mech-Viz 프로젝트 만들기
-
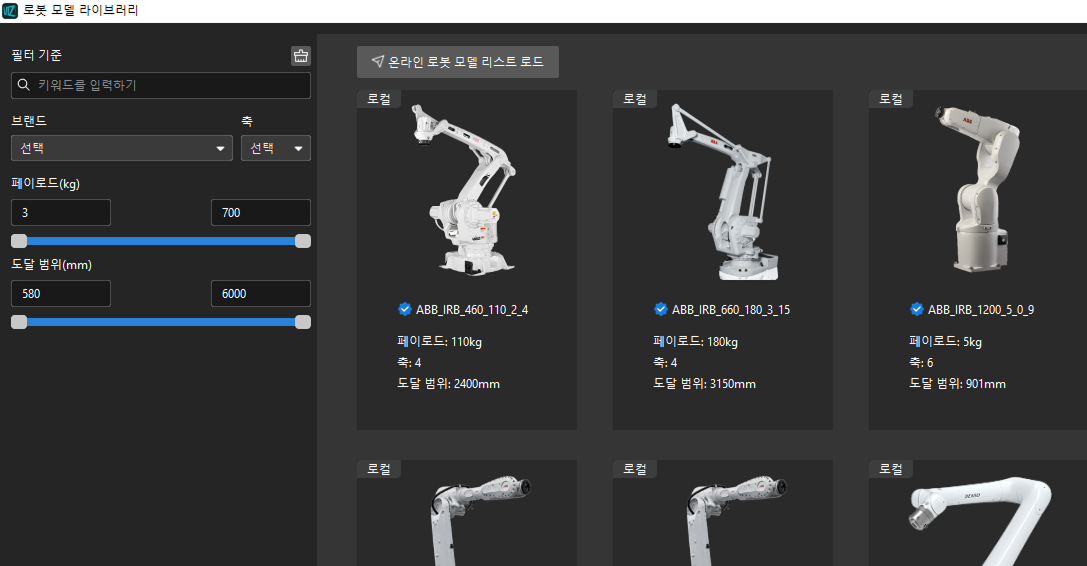
Mech-Viz 소프트웨어를 열고 키보드의 Ctrl + N(프로젝트 새로 만들기)를 누릅니다. 다음 인터페이스에서 실제 로봇의 브랜드와 모델에 따라 해당한 로봇 모델을 선택합니다.
-
키보드에 있는 Ctrl + S 버튼을 눌러 프로젝트를 저장하는 데 사용되는 폴더를 새로 만들거나 선택하십시오.
-
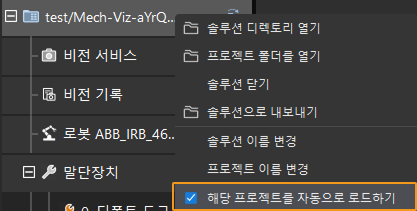
Mech-Viz 소프트웨어의 왼쪽 패널에서 프로젝트 이름을 마우스 오른쪽 버튼으로 클릭하고 *자동으로 로드되도록 설정*을 선택합니다.
로봇 연결
-
Mech-Viz 소프트웨어에서 툴 바에 있는 *로봇 마스터 컨트롤 연결*을 클릭합니다.
-
*로봇 IP 주소*에서 실제 로봇의 IP 주소(그림의 IP 주소는 예시임)를 입력하고 로봇 연결을 클릭합니다.
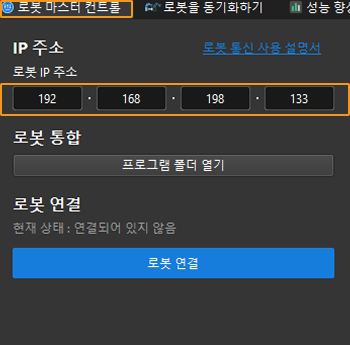
Mech-Viz에서 실제 로봇을 성공적으로 연결하면 현재 상태는 *연결됨*으로 표시되며 툴 바의 아이콘은 파란색에서 녹색으로 바뀝니다.
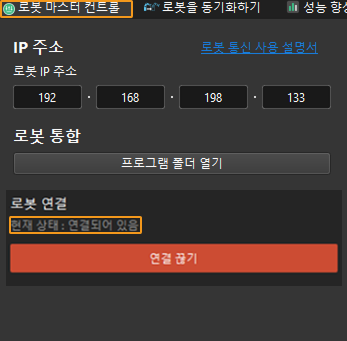
연결에 실패한 경우, 설정된 로봇 IP 주소가 잘못되었는지 확인하십시오.
로봇을 이동하기
-
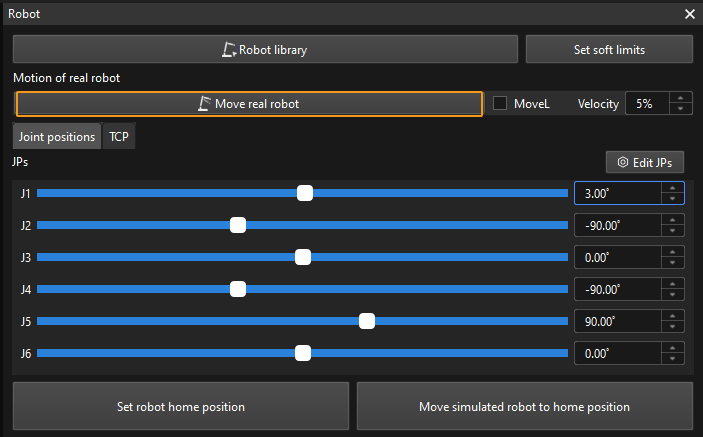
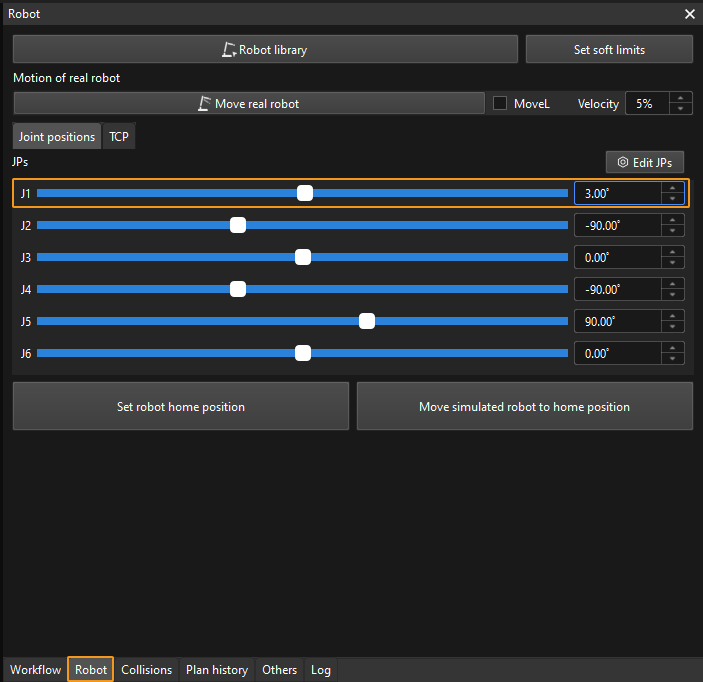
Mech-Viz 소프트웨어에서 툴 바의 속도와 가속도를 5%로 설정하십시오.

-
툴 바에서 *로봇을 동기화하기*를 클릭하여 선택 당한 상태를 유지하면 이때 3D 시뮬레이션 공간의 가상 로봇 포즈는 실제 로봇 포즈로 동기화되고 *로봇을 동기화하기*를 다시 클릭하여 선택 당한 상태를 취소합니다.

-
로봇 옵션에서 J1 관절 각도를 조금 조절합니다(예: 0°를 3°로 조절함). 이 작업은 가상 로봇을 이동시킵니다.
-
실제 로봇 이동을 클릭하여 실제 로봇의 이동 여부를 확인합니다. 실제 로봇이 가상 로봇의 포즈로 이동하면 마스터 컨트롤 통신이 정상임을 의미합니다.
로봇을 실행할 때 안전을 부디 주의하십시오. 비상시에는 티치 펜던트의 비상정지 버튼을 눌러주십시오.