마스터 컨트롤 통신 구성
이 부분에서는 Doosan 로봇의 마스터 컨트롤 방법을 소개합니다.
플래싱하기 전 준비
하드웨어 및 소프트웨어 버전 확인
|
본 문서에 나열된 버전 및 모델은 적합성을 위해 엄격히 테스트되었습니다. 다른 모델과 버전의 경우, 사용자는 본 문서를 참고하여 작업을 시도할 수 있으며, 문제가 발생하면 Mech-Mind 기술 서포트팀에 문의하십시오. |
-
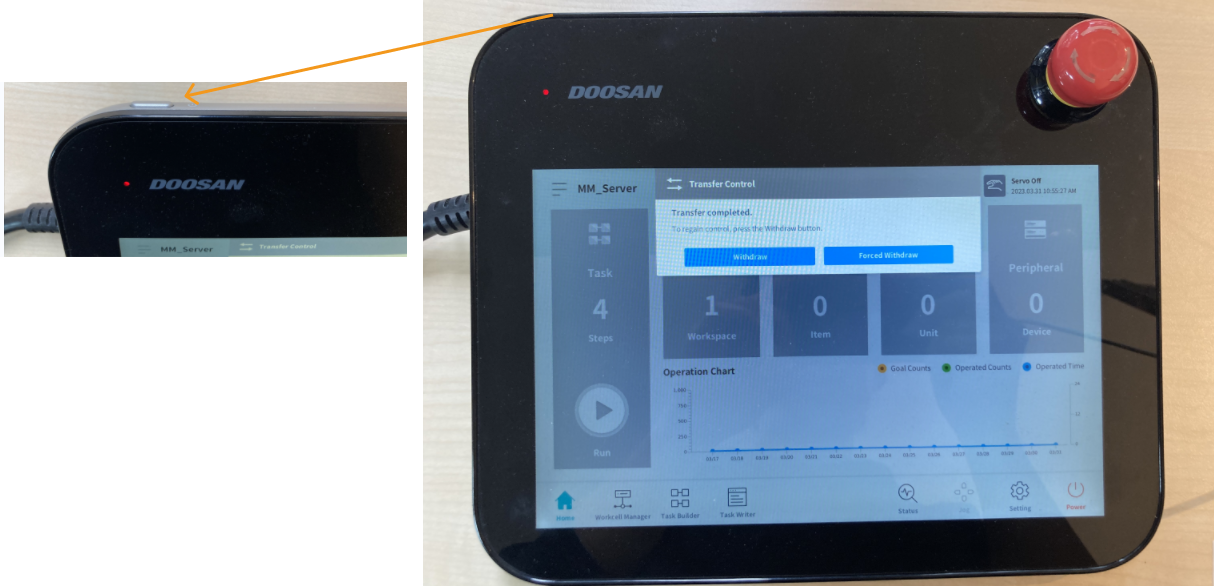
로봇의 모델은 Doosan M 시리즈 해당 시리즈 로봇의 제어 캐비닛이 아래 그림과 같습니다.

-
컨트롤러 펌웨어 버전은 V2.8입니다.
로봇과 티치 펜던트를 실행하기
-
로봇 제어 캐비닛 베이스 밑에의 스위치를 엽니다.
-
로봇 티치 펜던트 좌측 상단의 전원 버튼을 누릅니다.
-
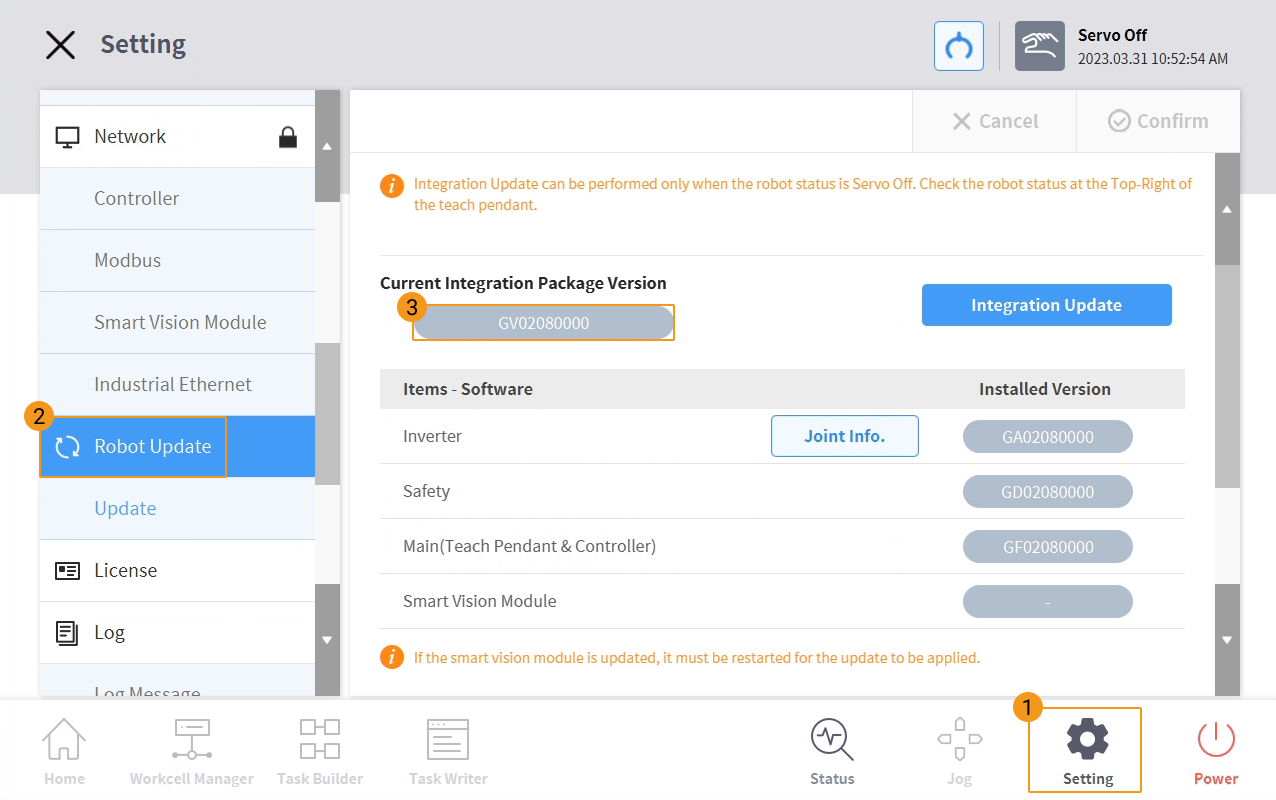
티치 펜던트 인터페이스에서 하단 패널의 Setting 버튼을 클릭한 다음 Robot Update 버튼을 클릭하여 컨트롤러 펌웨어 버전은 V2.8(즉 그림에 표시된 GV02080000)인지 확인합니다.
-
티치 펜던트 인터페이스에서 하단 패널의 Status 버튼을 클릭한 다음 On 버튼을 클릭합니다. Safety Message 창이 뜹니다.
하단 패널의 옵션을 클릭하면 인터페이스 위의 다른 옵션 창이 닫혀 있는지 확인합니다. 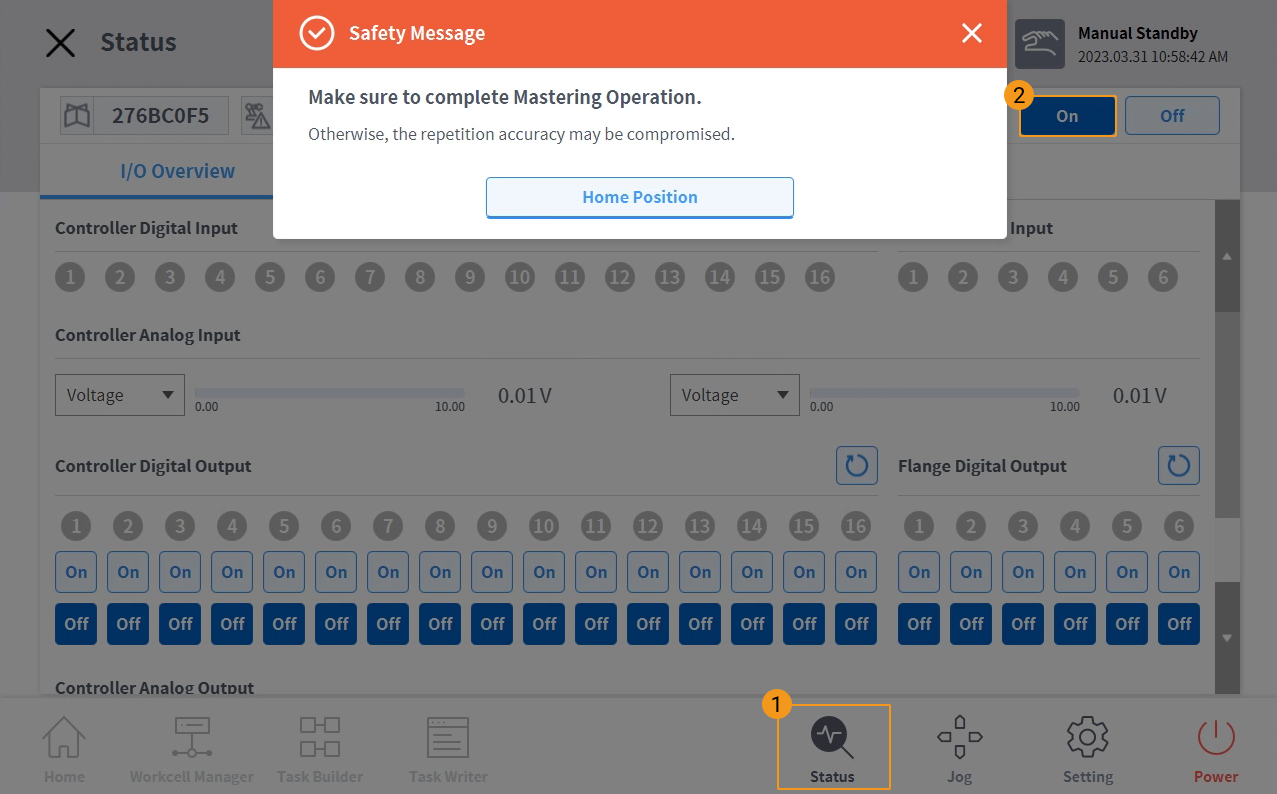
-
Home Position 버튼을 계속 누르고 있다가, Information Message 창이 팝업되고(몇 초 후 자동으로 사라지며, 이는 로봇이 자동으로 홈 위치로 이동했음을 의미함) 난 후에 버튼에서 손을 뗍니다. 그런 다음 Safety Message 창의 닫기 버튼을 클릭하여 창을 닫습니다.
이 절차를 수행하기 전에, 로봇이 이동하는 동안 충돌이 발생하지 않도록 작업자와 로봇의 안전을 반드시 확인하십시오. 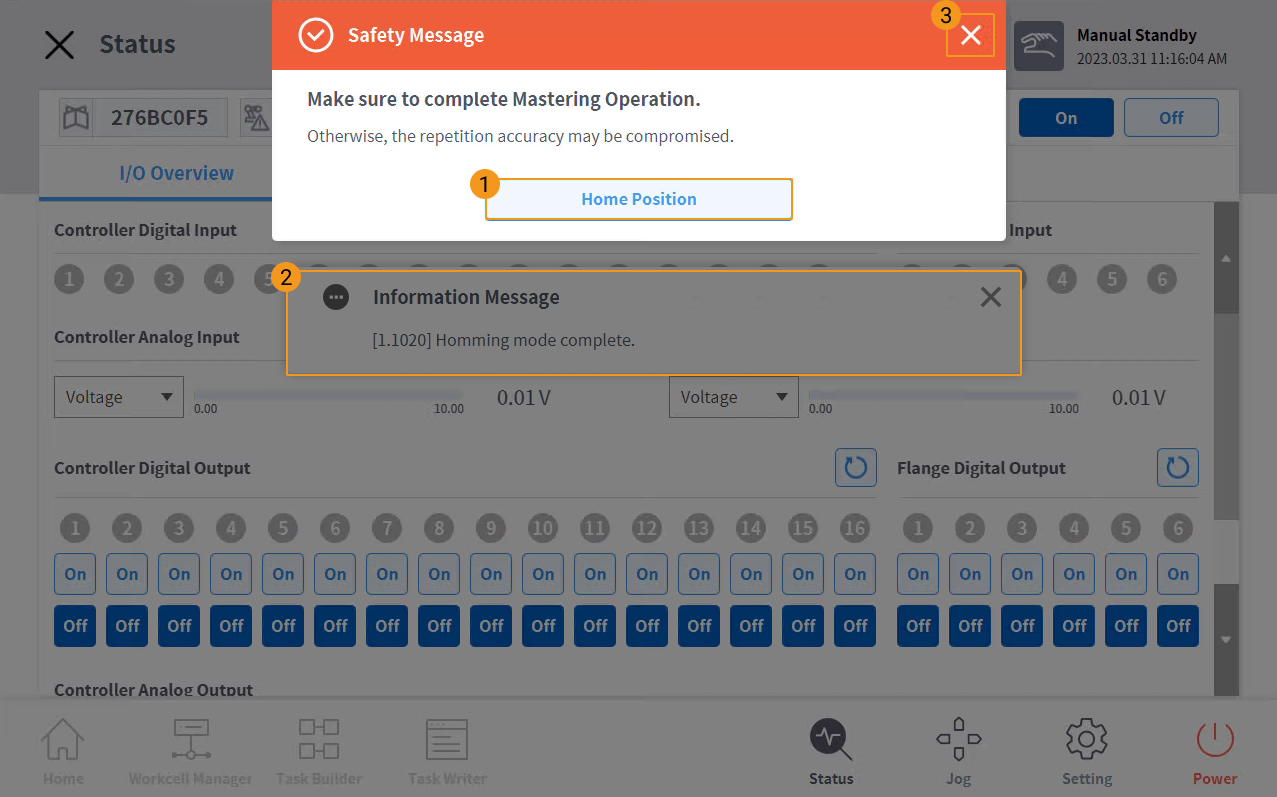
위 작업 완료후 티치 펜던트 우측 상단의 Servo 상태는 녹색으로 표시됩니다.
네트워크 연결 설정하기
하드웨어 연결하기
네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고 다른 쪽 끝을 로봇 컨트롤러 캐비닛의 네트워크 포트에 삽입합니다(그림에 표시된 3개의 네트워크 포트는 모두 TCP 통신에 사용할 수 있으며 하나를 선택하면 됩니다).

IP 주소 설정하기
-
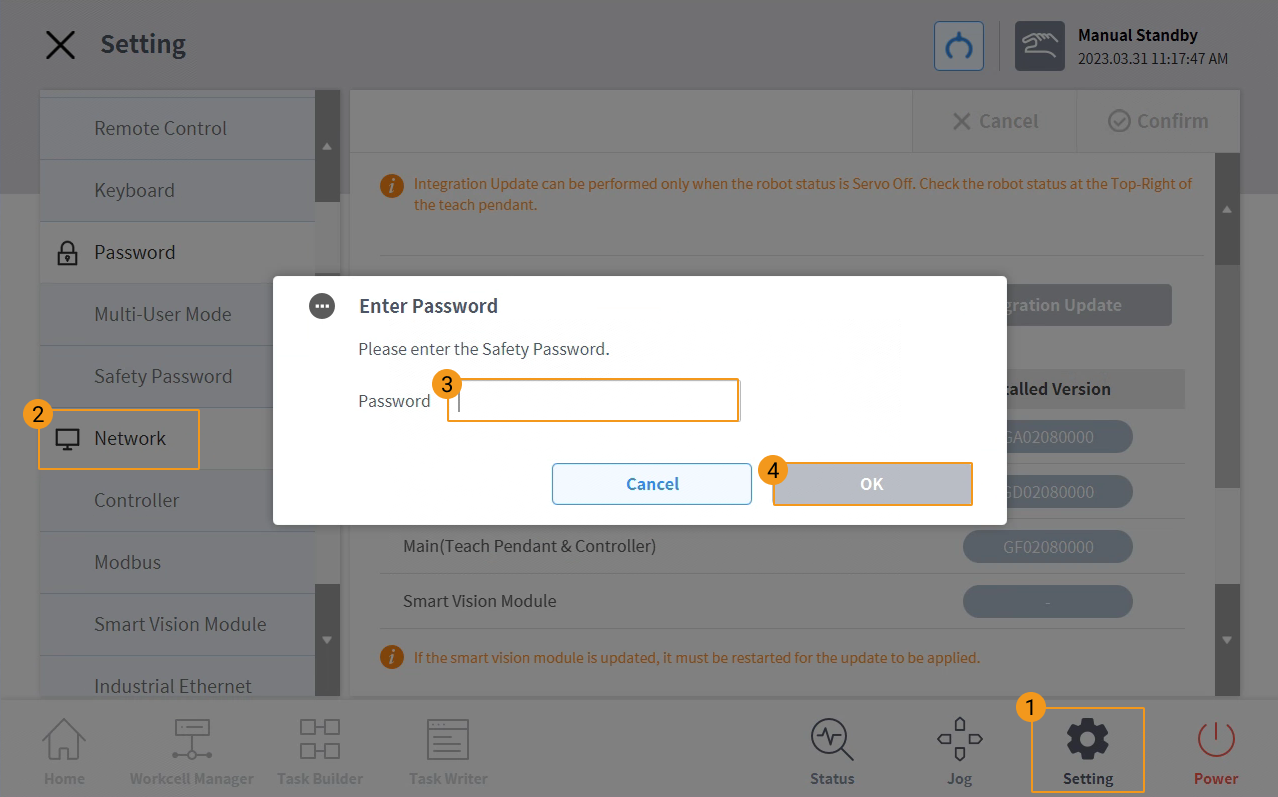
티치 펜던트 인터페이스에서 하단 패널의 Setting 버튼을 클릭한 다음 Network 버튼을 클릭합니다. 비밀번호(기본 비밀번호는 admin임)를 입력한 다음 OK 버튼을 클릭합니다.
-
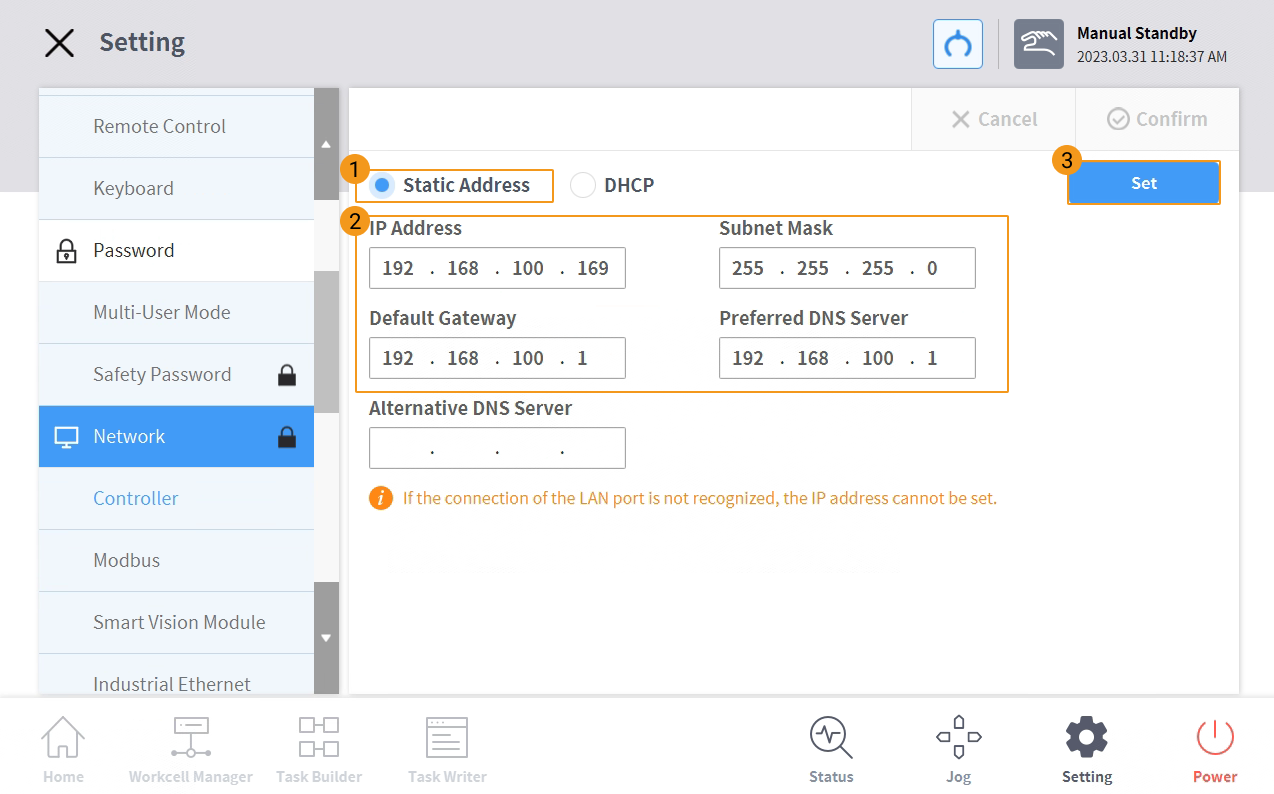
Static Address 버튼을 클릭하여 로봇의 IP를 설정한 다음 Set 버튼을 클릭합니다.
-
IPC의 IP 주소 설정합니다.
로봇의 IP 주소와 IPC의 IP 주소는 동일한 네트워크 세그먼트에 있어야 합니다. 즉, 두 IP 주소의 네트워크 부분과 서브넷 마스크가 동일해야 합니다. 예를 들어, 192.168.100.169/255.255.255.0 및 192.168.100.170/255.255.255.0은 동일한 네트워크 세그먼트에 있습니다.
로봇에 파일을 플래싱하기
| 플래싱 작업이 로봇 시스템에 영향을 미치지 않도록 하기 위해, 플래싱을 시작하기 전에 로봇 시스템 파일을 백업하는 것이 좋습니다. 작업 과정에서 문제가 발생할 경우 백업 파일을 사용하여 로봇 시스템을 복원할 수 있습니다. 자세한 작업 방법은 로봇 파일 백업 및 복원 파일을 참조하십시오. |
-
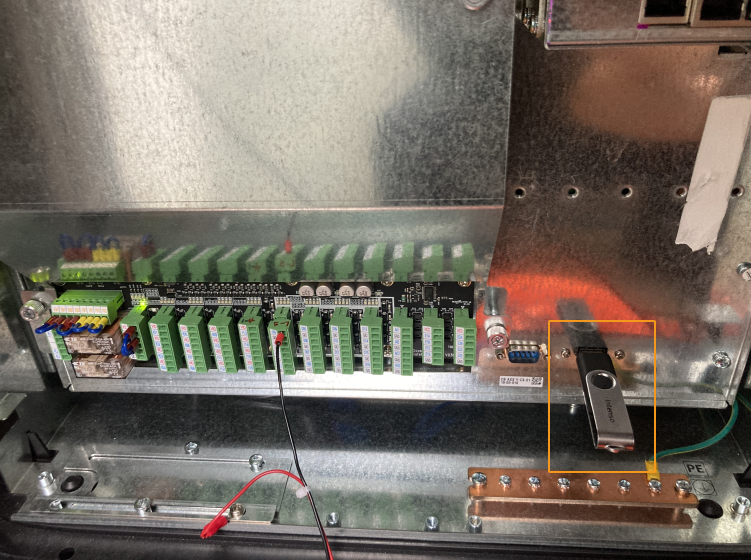
USB를 제어 캐비닛에 있는 USB 포트로 꽂아 주십시오.
-
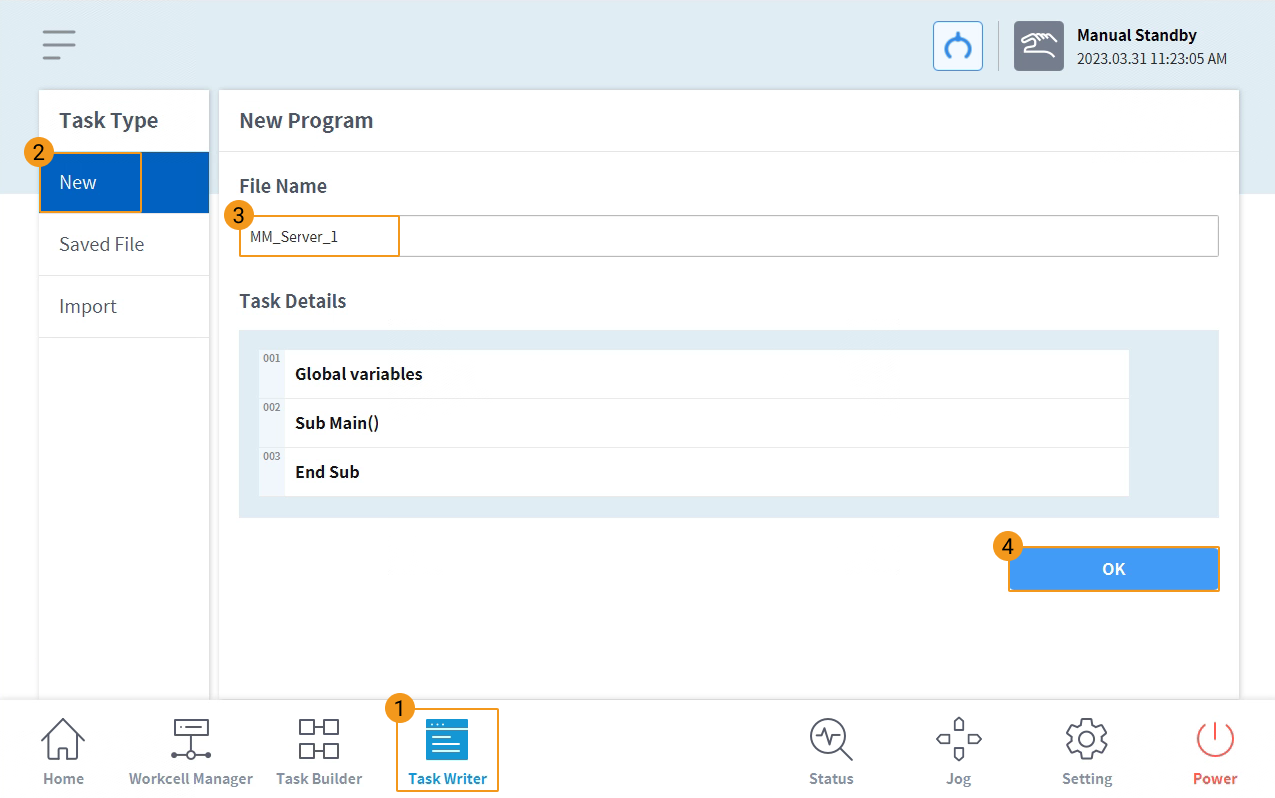
티치 펜던트 인터페이스에서 차례로 Task Writer → New 버튼을 클릭한 다음 파일 이름(예: MM_Server_1)을 입력하고 마지막에 OK 버튼을 클릭합니다.
-
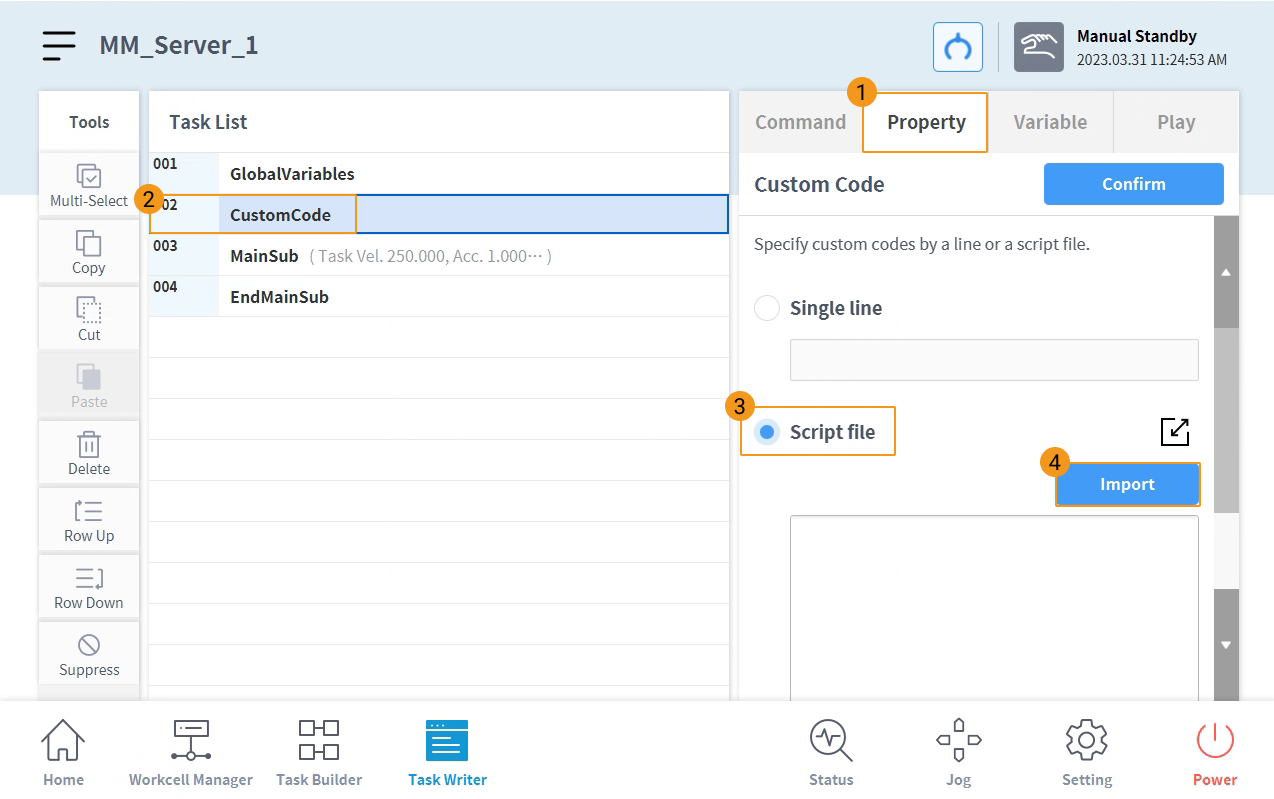
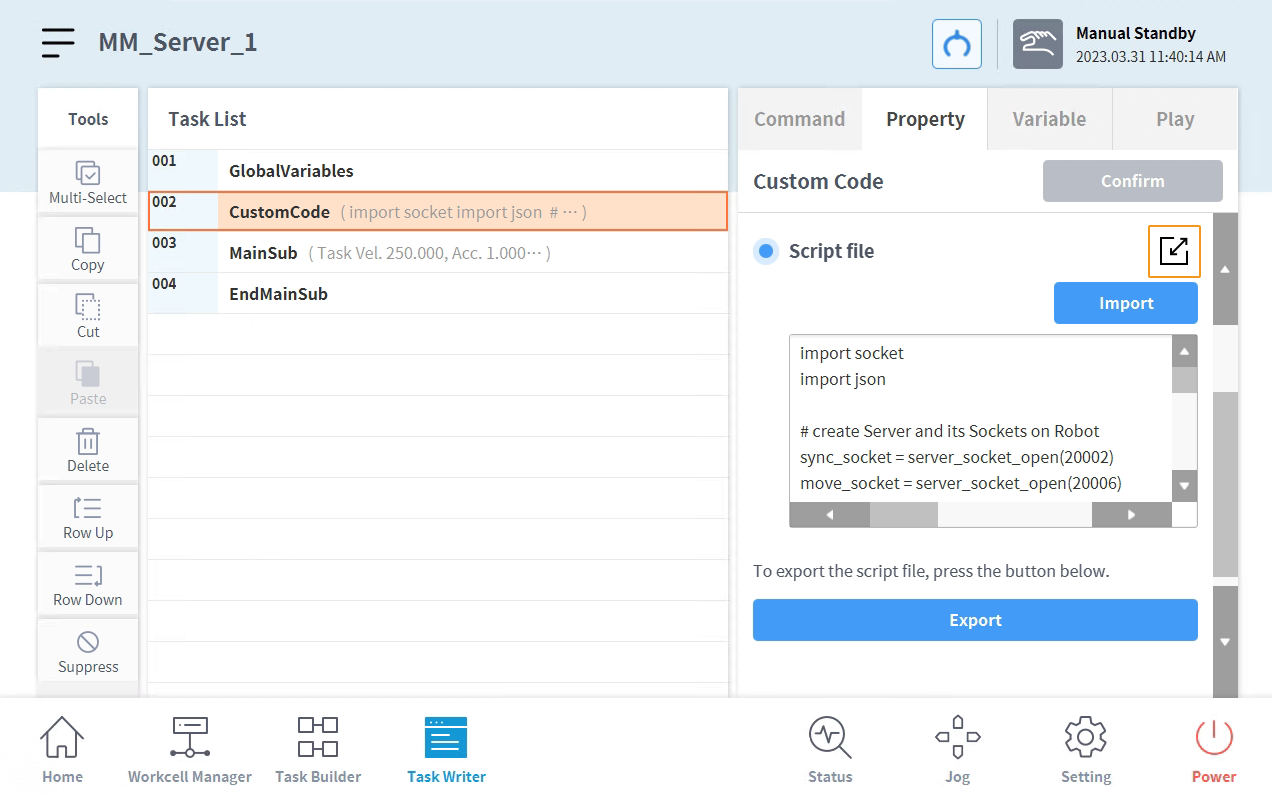
차례로 Property, CustomCode, Script file, Import 버튼을 클릭합니다.
-
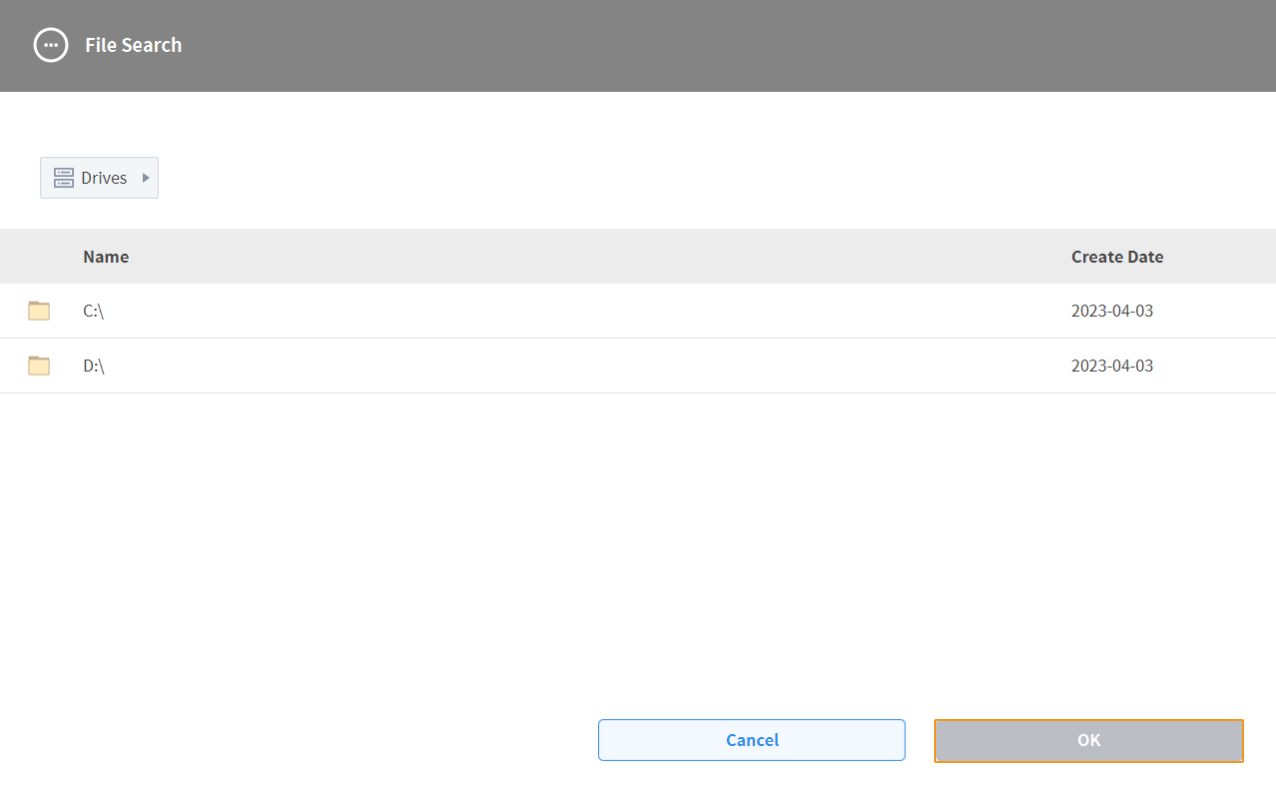
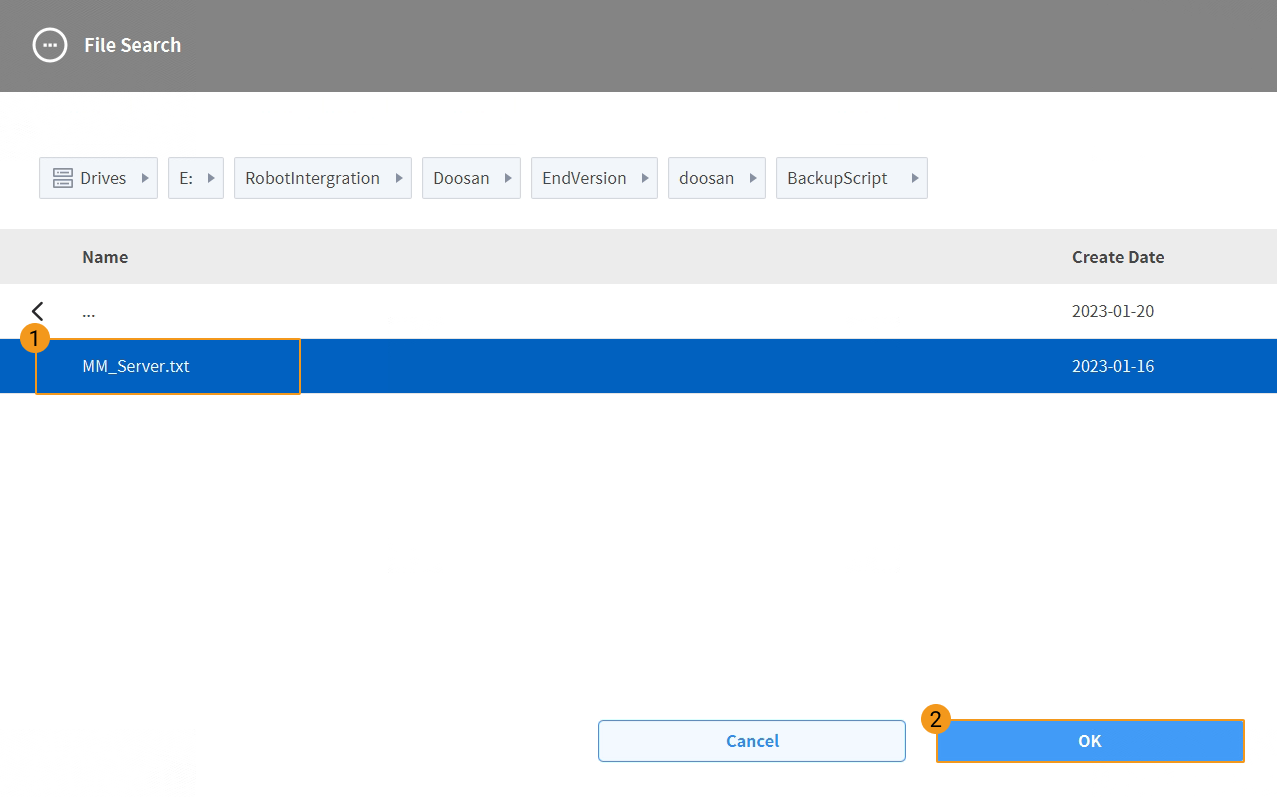
팝업창에서 MM_Server.txt 를 찾고 선택합니다. 마지막으로 OK 를 클릭합니다.
-
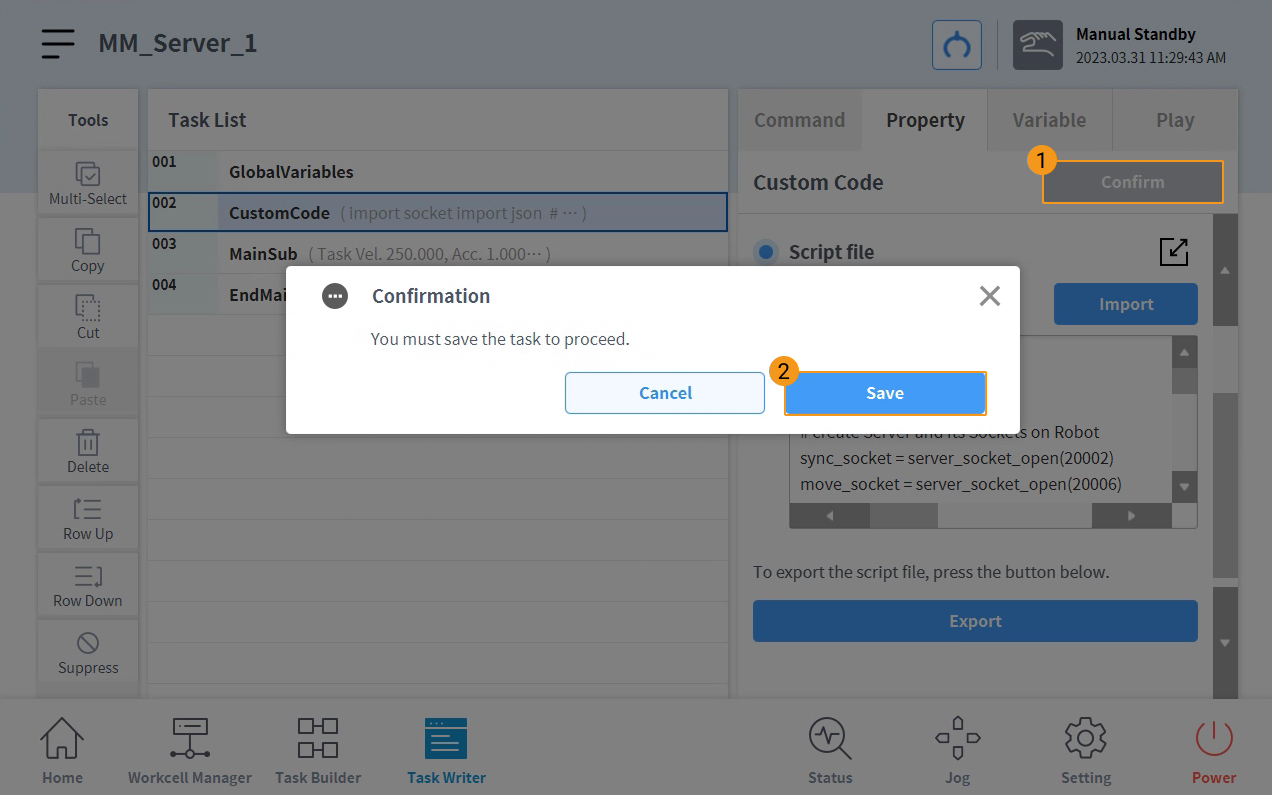
차례로 Confirm, Save 버튼을 클릭합니다.
마스터 컨트롤 통신 테스트
-
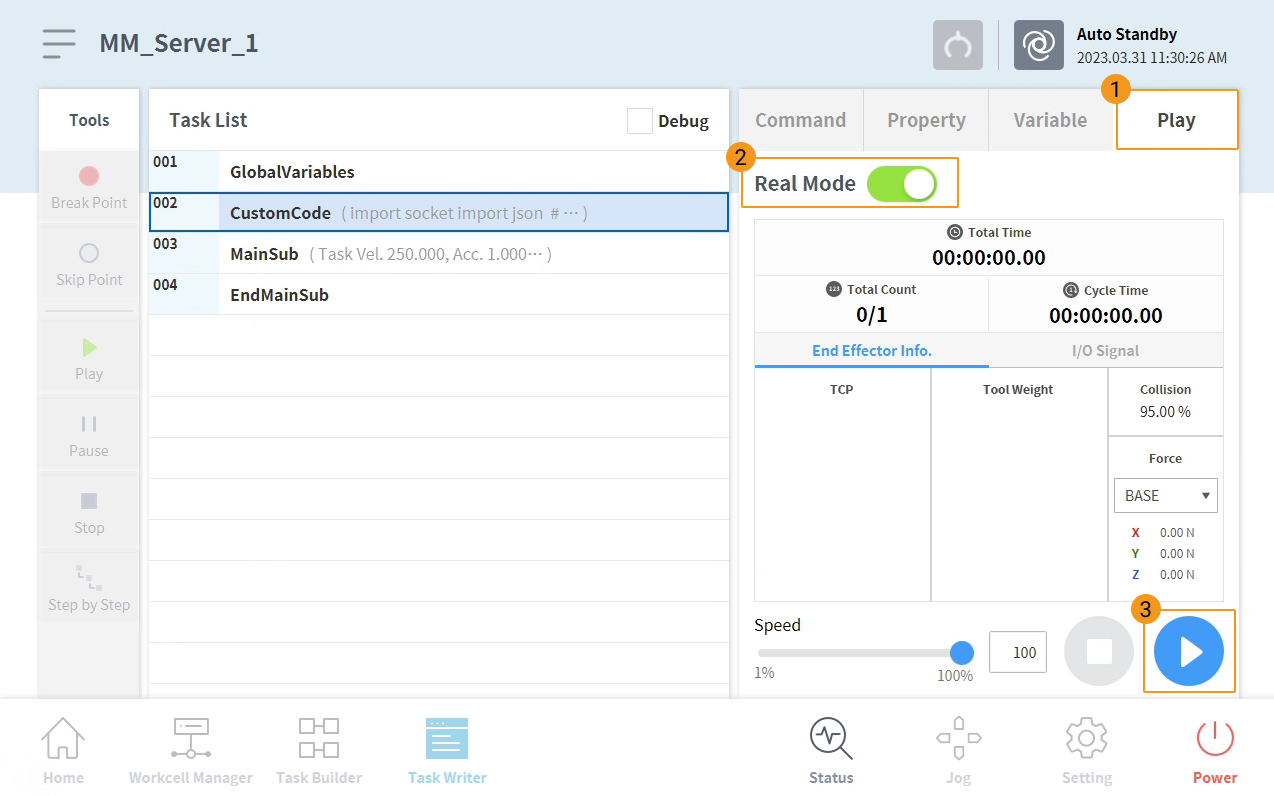
티치 펜던트 인터페이스에서 Play 버튼을 클릭하여 Real Mode 스위치를 엽니다. 로봇의 이동 속도를 적절히 낮추고 마지막으로 실행 버튼을 클릭하여 로봇 제어 프로그램을 시작합니다.
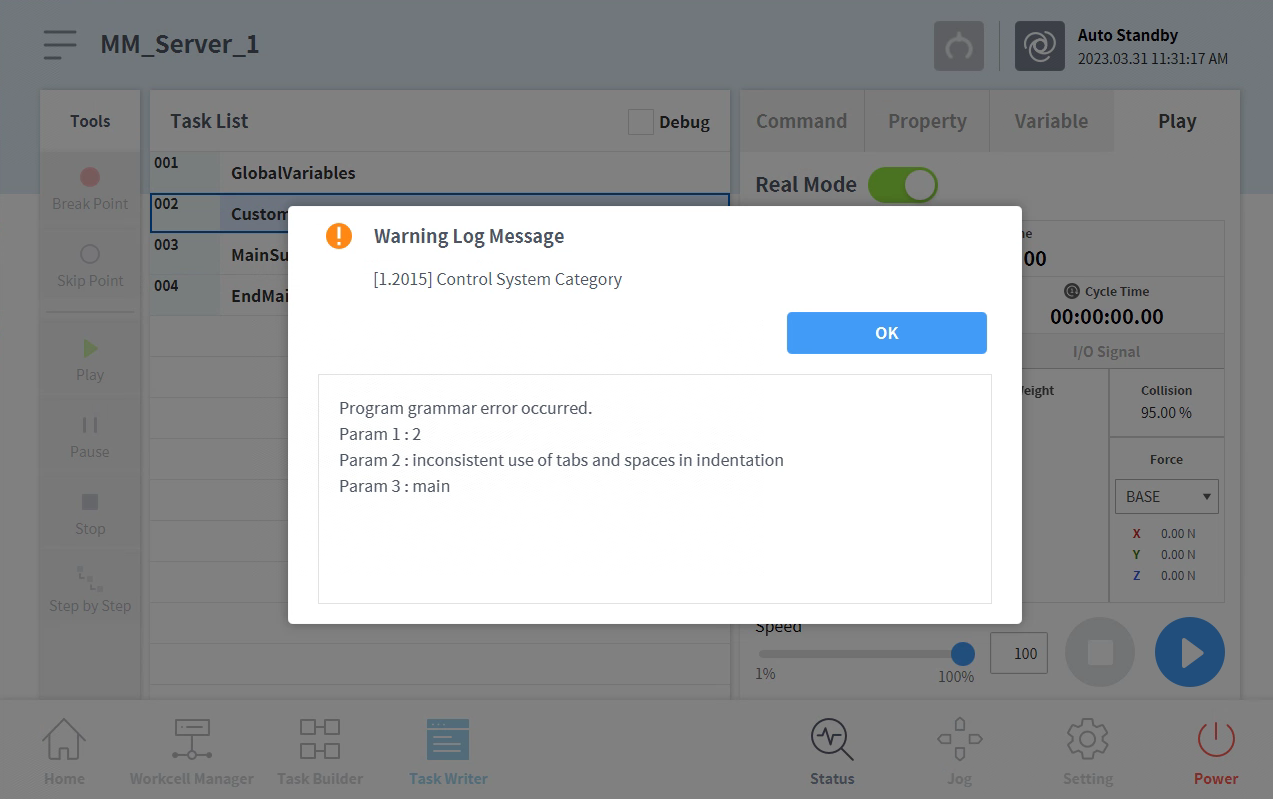
아래 경고창이 뜨면 MM_Server_1 파일의 Python 코드 들여쓰기 불일치가 있는지 확인합니다. Python 코드는 들여쓰기를 사용하여 서로 다른 코드 블록을 구분하기 때문에 들여쓰기에 대한 엄격한 요구 사항이 있습니다.
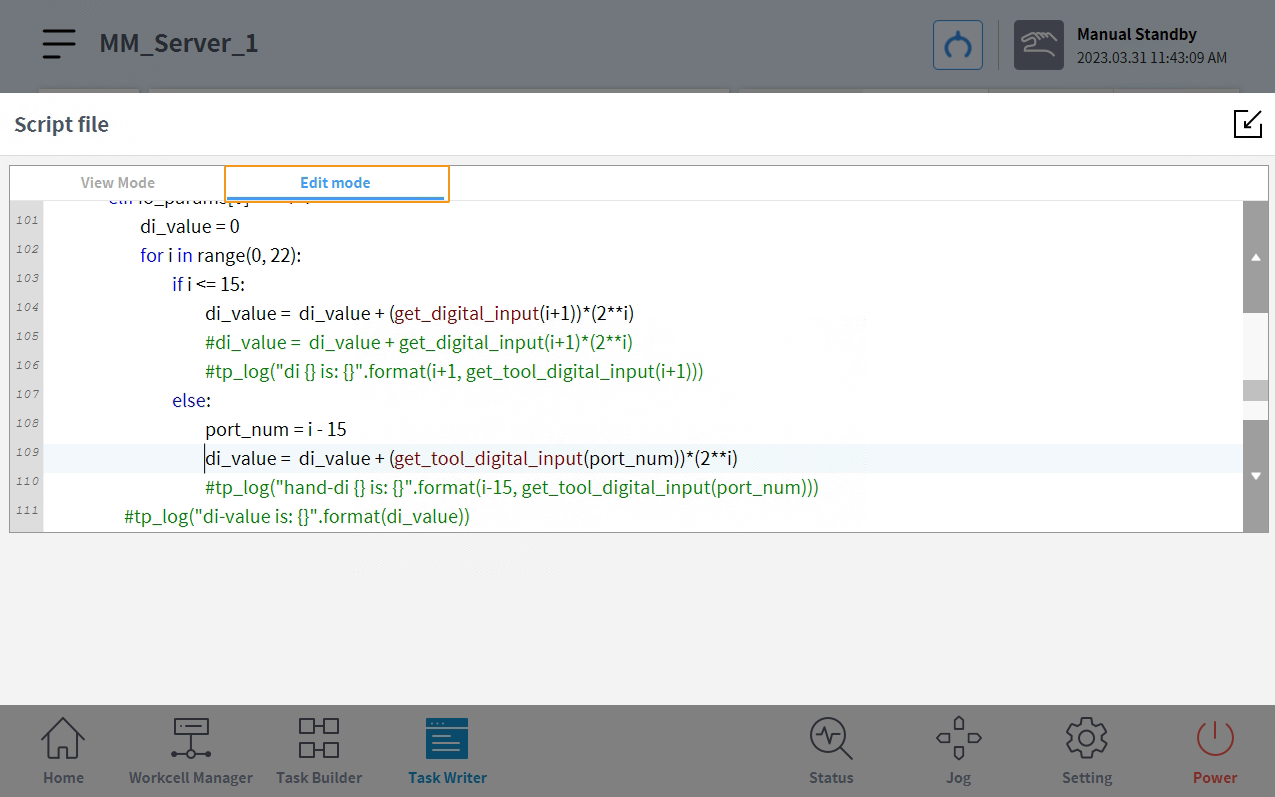
아래 그림과 같이 파일을 편집하여 잘못된 들여쓰기를 제거합니다. 또는 사용자가 도입 전의 MM_Server.txt 파일을 수정한 후, 재차 도입 절차를 수행할 수도 있습니다.
-
마스터 컨트롤 통신 테스트참고하여 후속 작업을 완료하십시오.
| Mech-Viz 연결이 끊긴 후에는 로봇 측 프로그램도 중지시켜야 합니다. 즉, 상기 MM_Server_1 태스크의 실행을 중지해야 합니다. 로봇을 다시 연결하고 제어해야 한다면 프로그램을 다시 실행해야 합니다. |
일반적인 로봇 작업
TCP를 설정하기
Mech-Viz 프로젝트중 말단장치가 있는 경우 다음과 같이 Tool Center Position 을 설정하며, 여기서 그리퍼를 예로 듭니다.
-
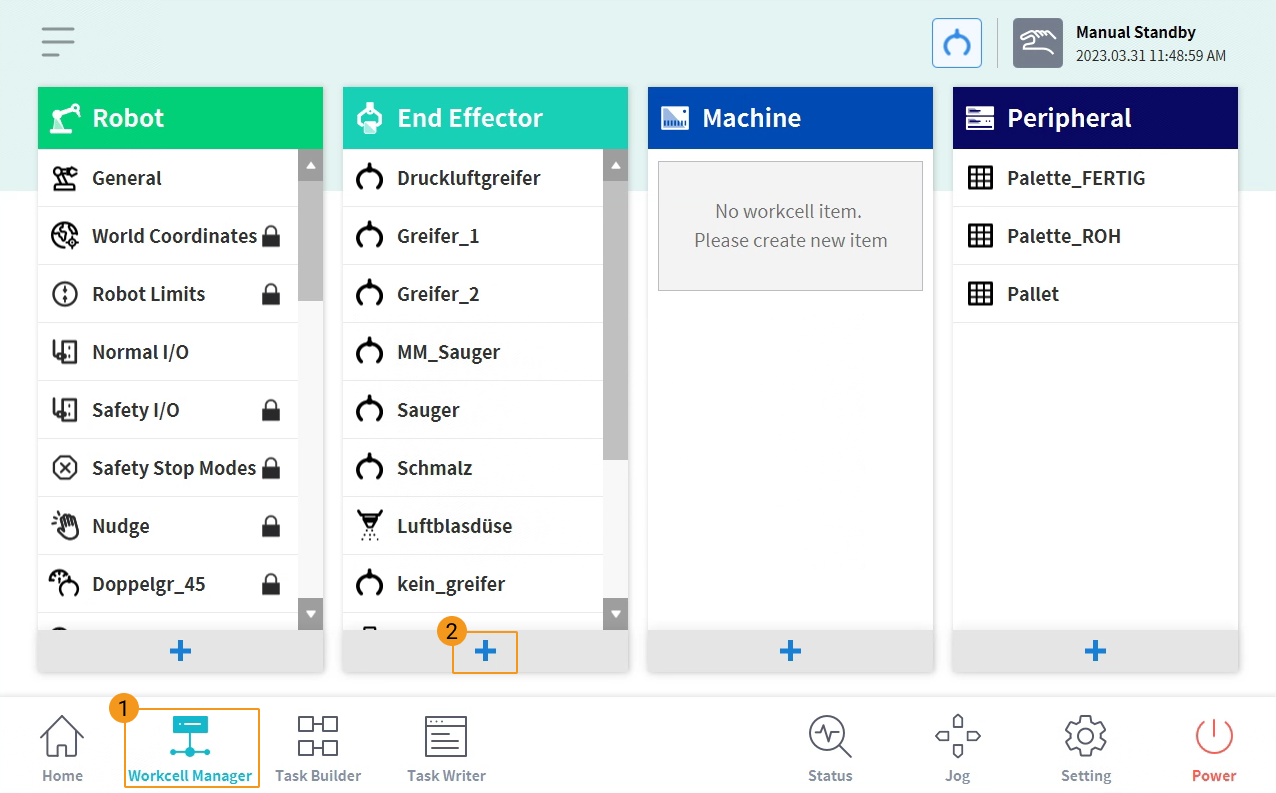
티치 펜던트 인터페이스에서 하단 패널의 Workcell Manager 버튼을 클릭한 다음 + 버튼을 클릭합니다.
-
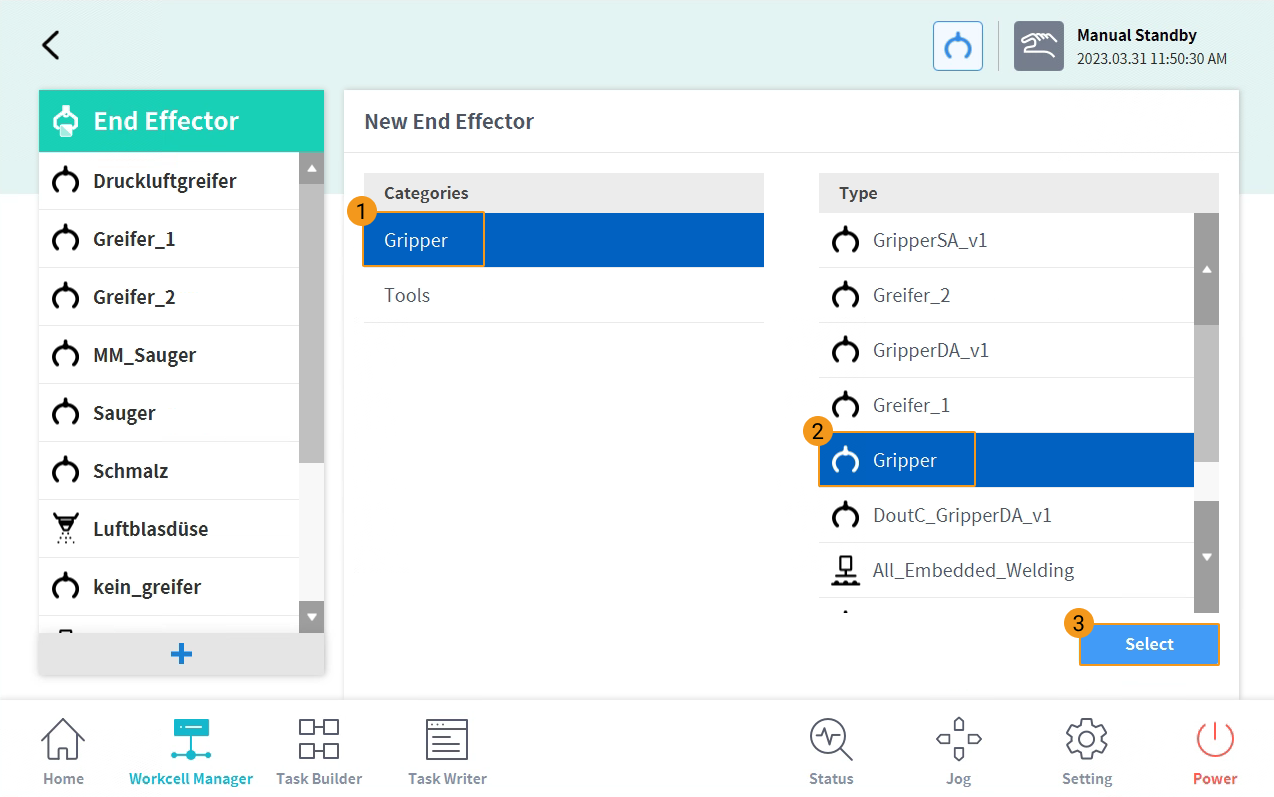
카테고리 옵션에서 Gripper 를 선택하고, 유형 옵션에서 Gripper 를 선택한 다음 Select 를 클릭합니다.
-
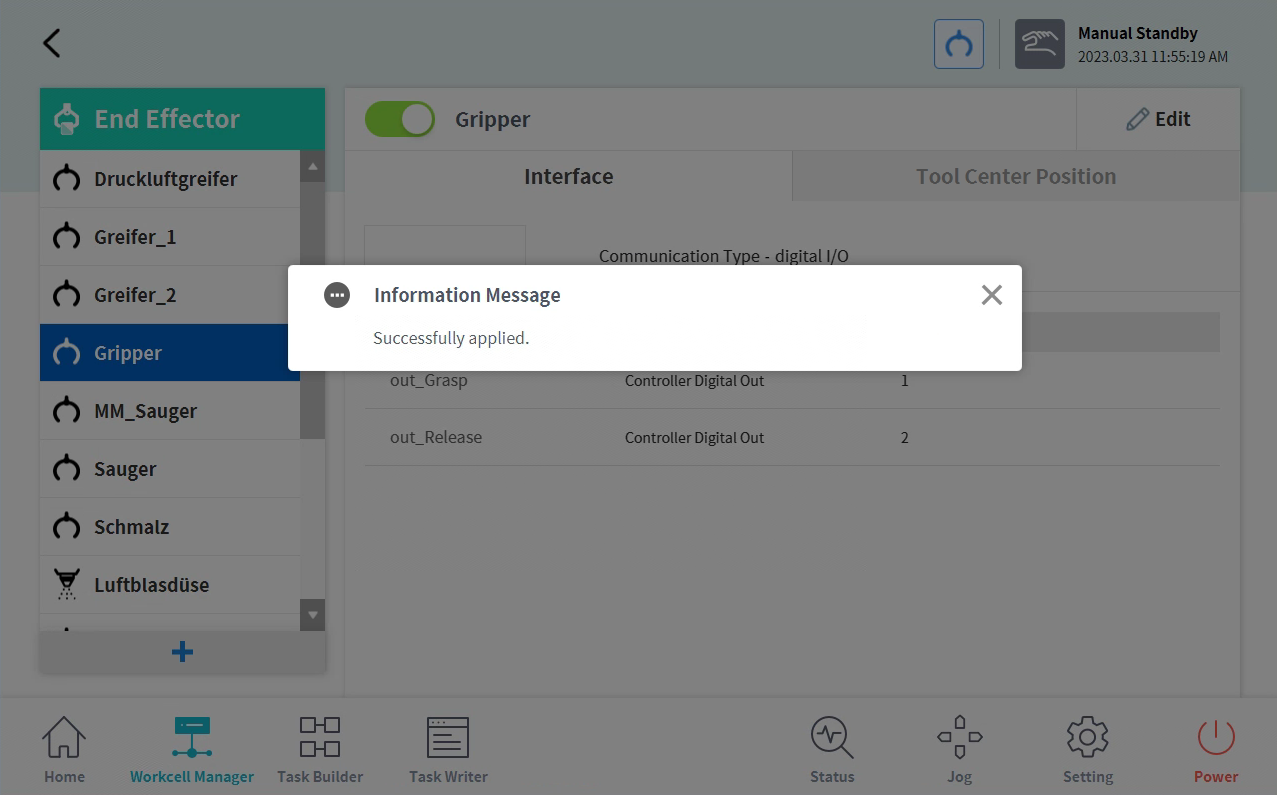
그리퍼의 이름을 입력하고 Tool Center Position 를 클릭한 다음 Position 파라미터(여기에서 z를 200mm로 설정함)를 설정하여 Confirm 를 클릭합니다.
Mech-Viz 의 TCP는 티치 펜던트 자동으로 동기화되지 않으므로 설정된 Position 파라미터 값이 Mech-Viz 에 설정된 TCP 값과 동일한지 확인하십시오. 그렇지 않으면, 말단장치에 특별한 오프셋과 회전이 있을 때 로봇의 직선 운동에 문제가 생길 것입니다. 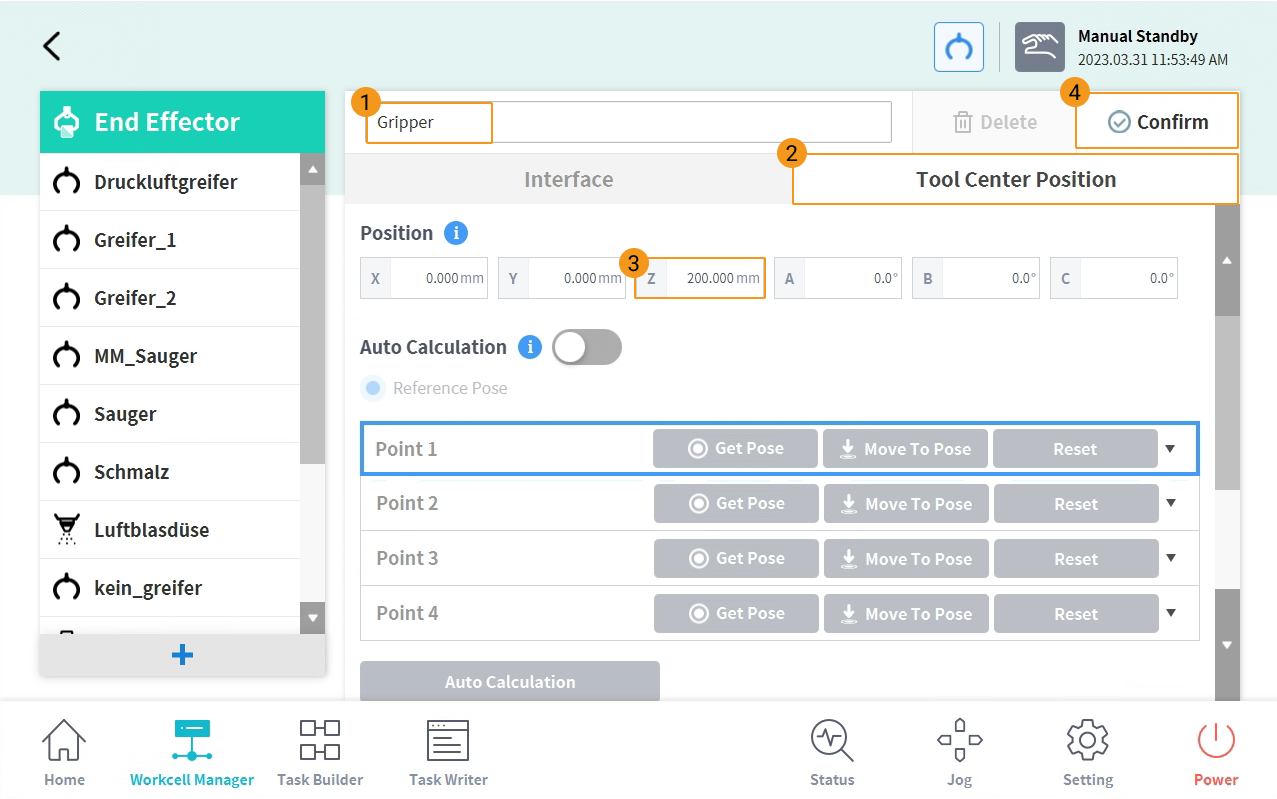
-
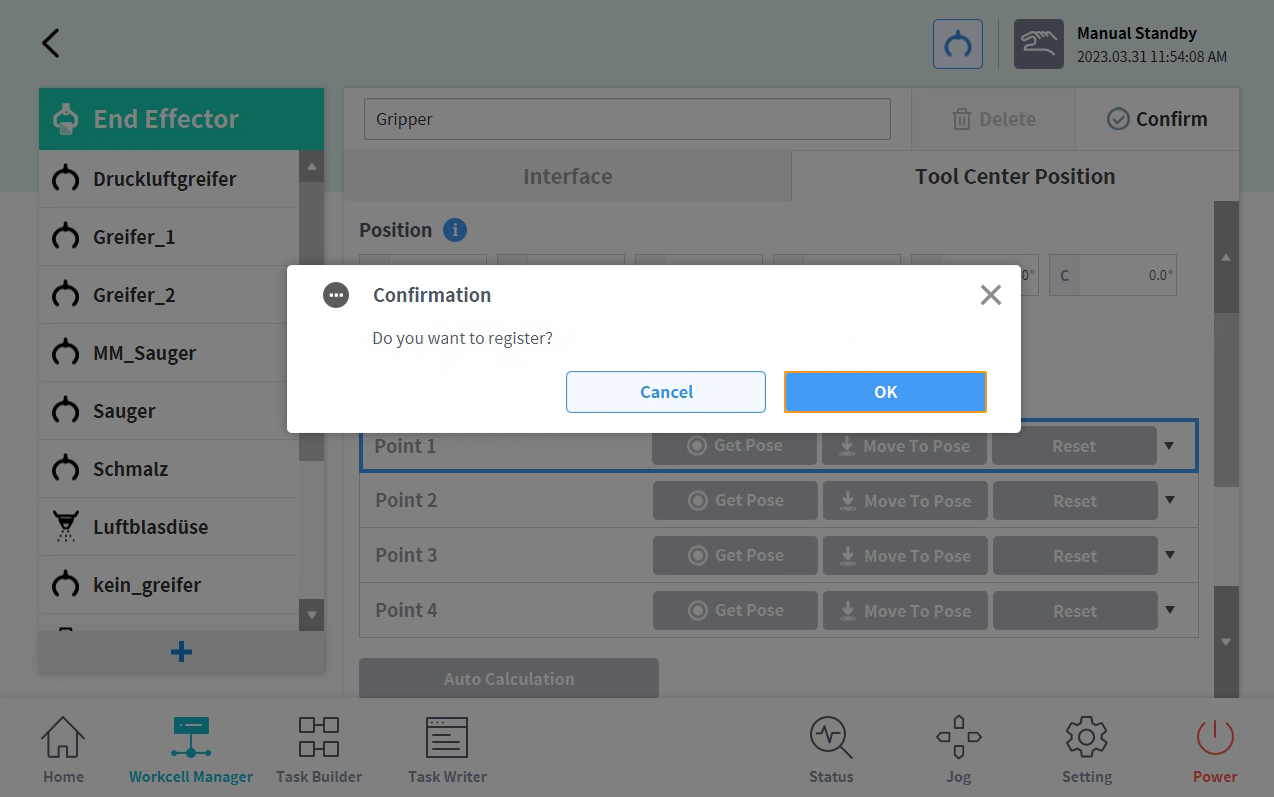
OK 를 클릭하면 데이터가 저장되고 적용 성공 창이 뜹니다.
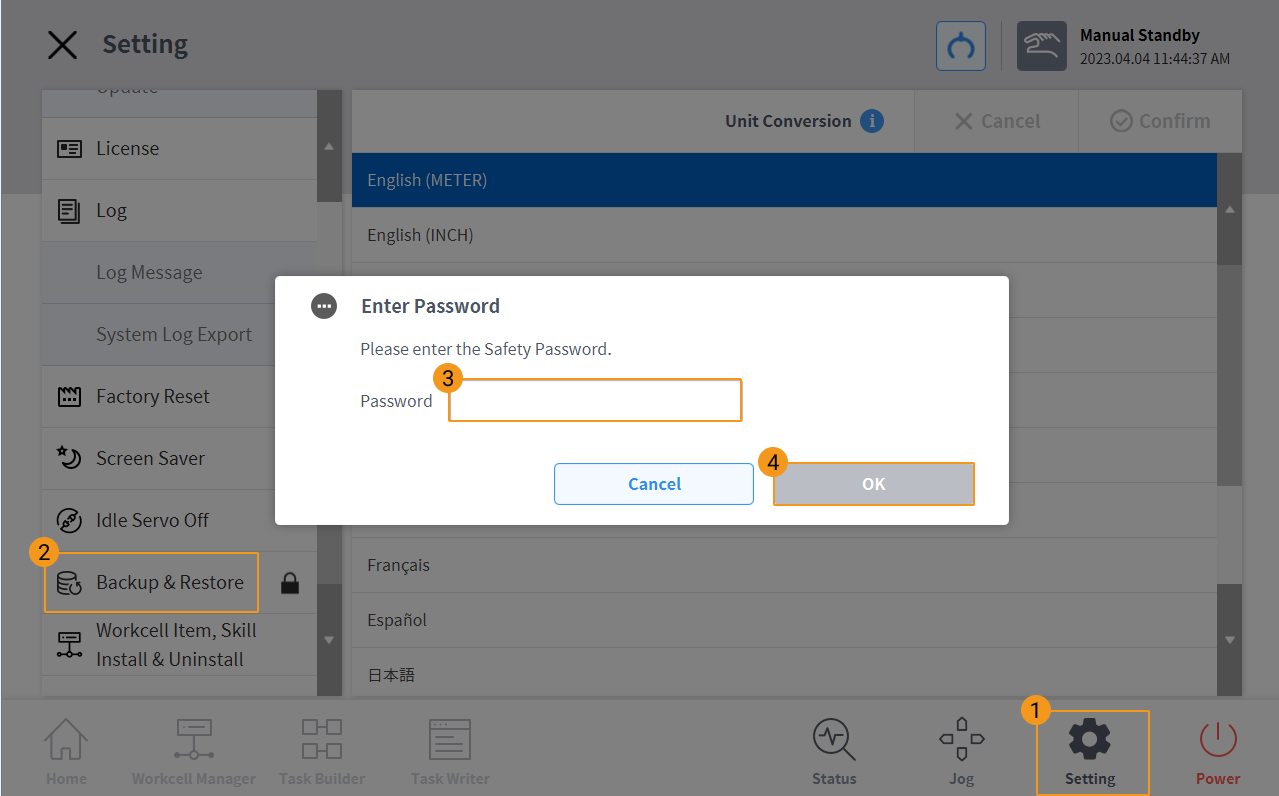
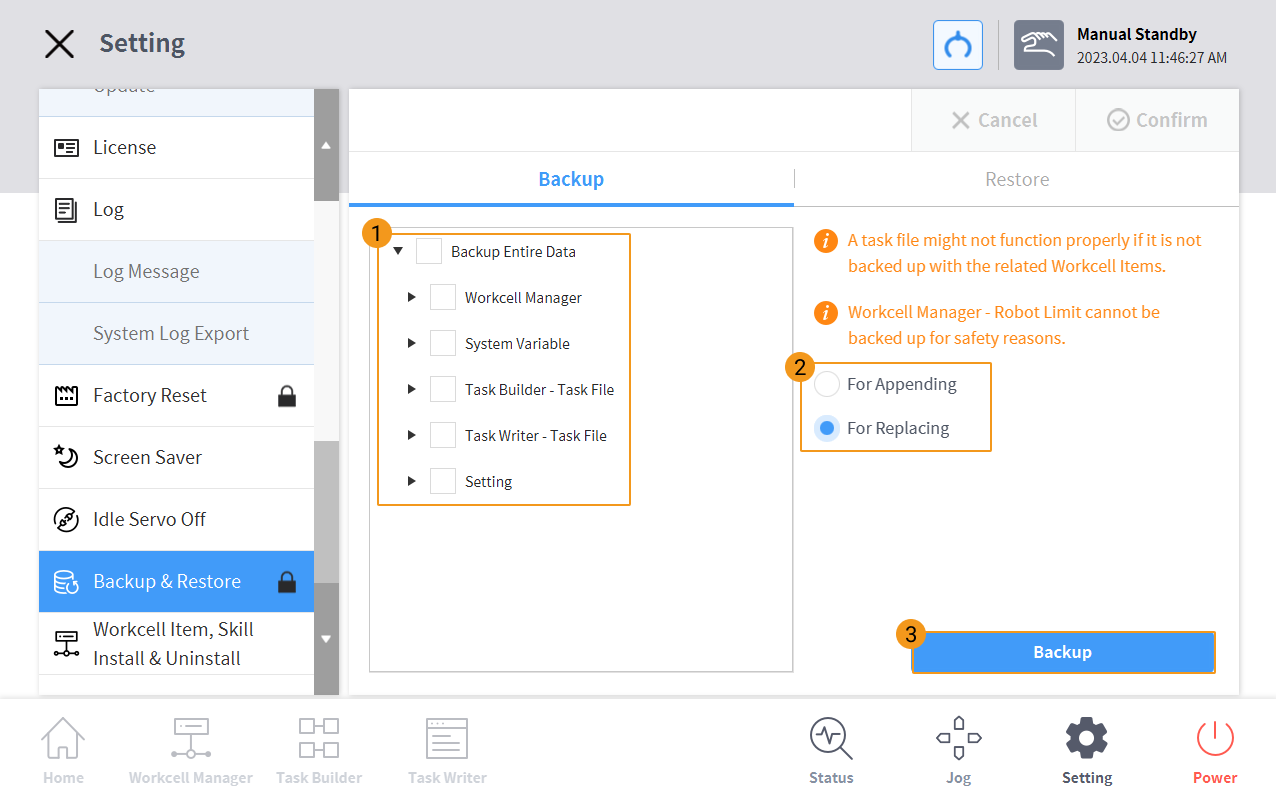
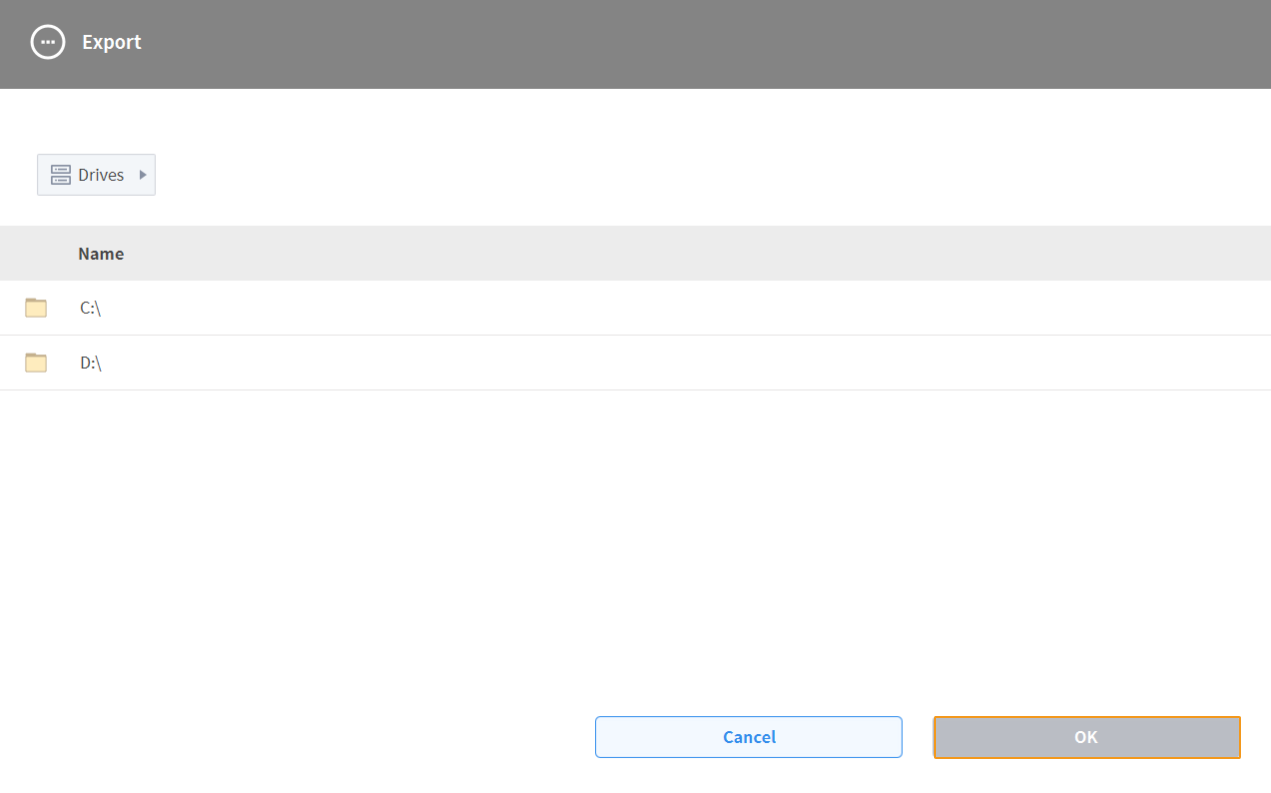
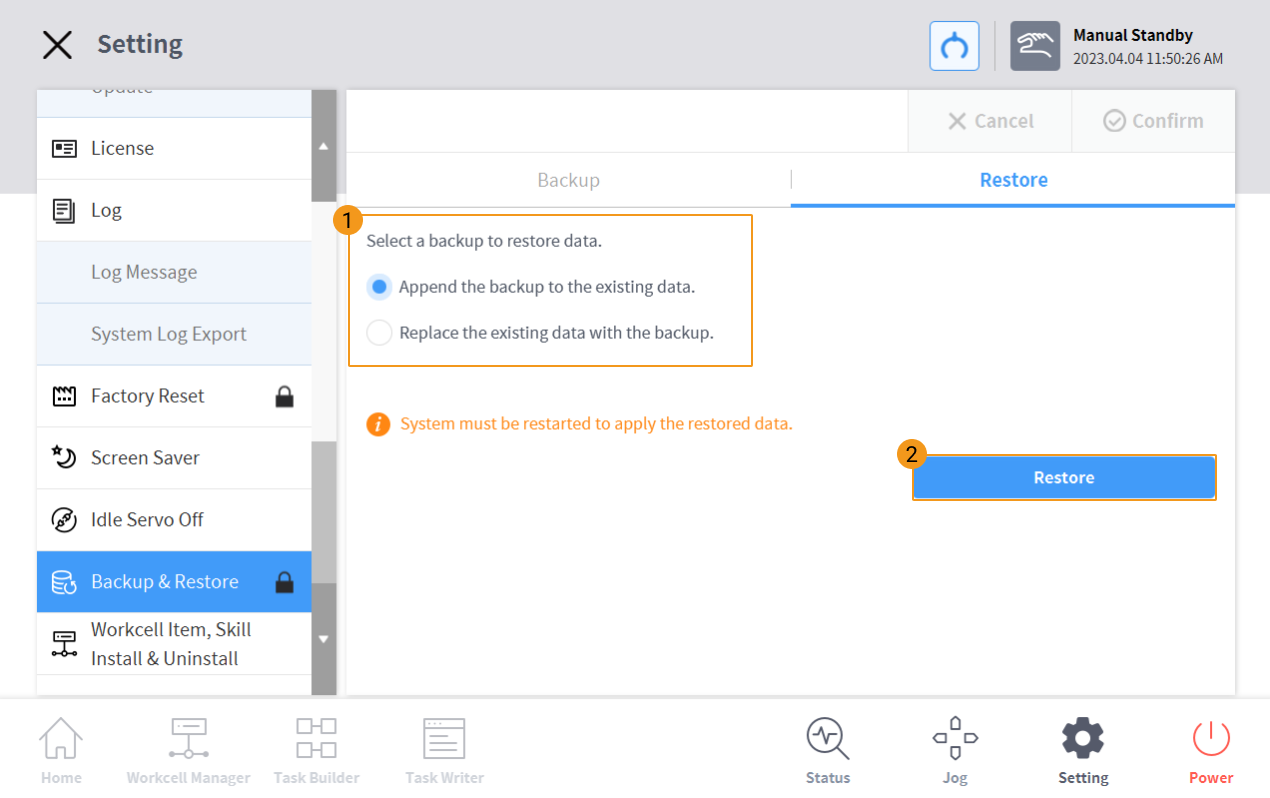
백업 및 로봇 파일 백업
플래싱 작업이 로봇 시스템에 영향을 미치지 않도록 하기 위해, 플래싱을 시작하기 전에 로봇 시스템 파일을 백업하는 것이 좋습니다. 작업 과정에서 문제가 발생할 경우 백업 파일을 사용하여 로봇 시스템을 복원할 수 있습니다.