DOBOT CRA 시리즈 표준 인터페이스 통신 구성
이 부분에서는 DOBOT CRA 시리즈 로봇에 대한 표준 인터페이스 통신을 구성하는 방법을 소개합니다.
플래싱하기 전 준비
하드웨어 및 소프트웨어 버전 확인하기
|
본 문서에 나열된 버전 및 모델은 적합성을 위해 엄격히 테스트되었습니다. 다른 모델과 버전의 경우, 사용자는 본 문서를 참고하여 작업을 시도할 수 있으며, 문제가 발생하면 Mech-Mind 기술 서포트팀에 문의하십시오. |
-
PC 제어 소프트웨어 이름 및 버전: DobotStudio Pro v4.4.0.
사용자는DOBOT 로봇 공식 홈페이지 다운로드 센터를 방문하여 Control Software 영역에서 필요한 소프트웨어 버전을 찾고  아이콘을 클릭하여 해당 소프트웨어 설치 패키지를 다운로드하고 소프트웨어를 설치합니다.
아이콘을 클릭하여 해당 소프트웨어 설치 패키지를 다운로드하고 소프트웨어를 설치합니다.
-
컨트롤러 모델: CC-262.
-
컨트롤러 모델: 4.4.0.0-stable.
컨트롤러 버전 확인하기
-
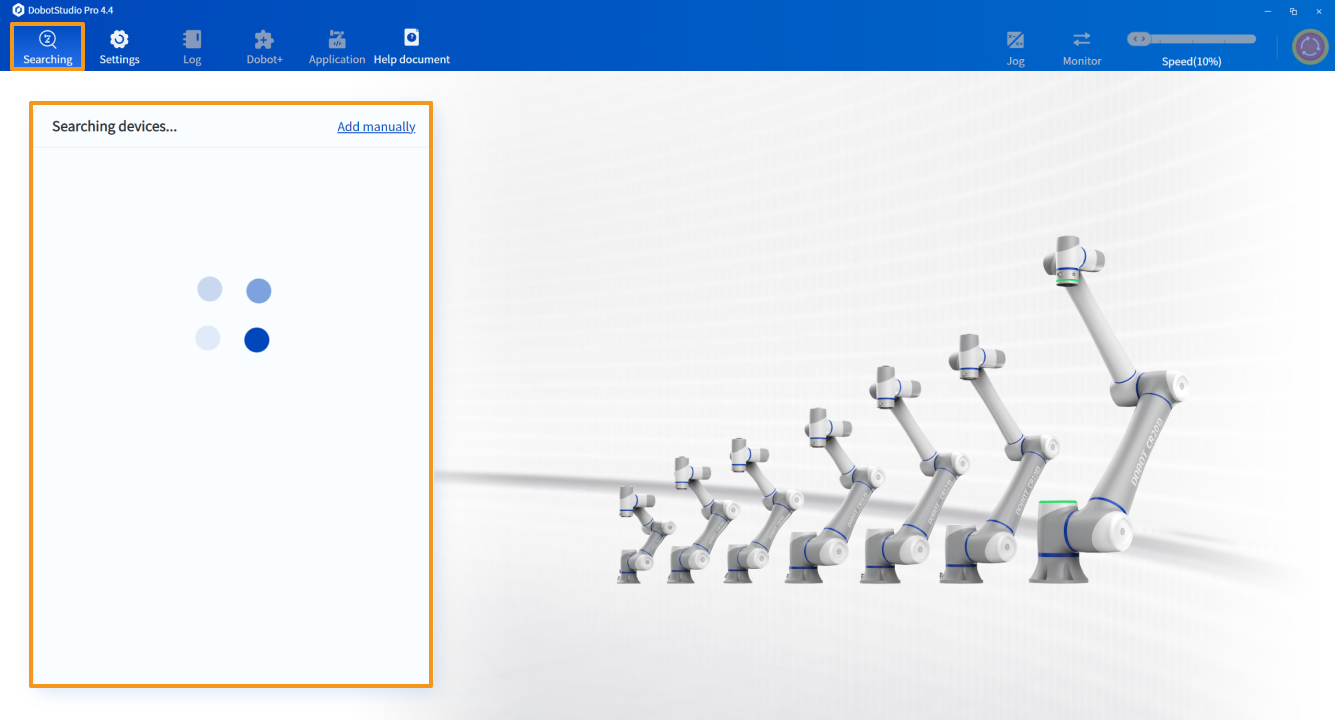
설치된 DobotStudio Pro 소프트웨어를 열고 아래 그림에 표시된 영역에서 소프트웨어 지침에 따라 로봇을 연결하십시오.
-
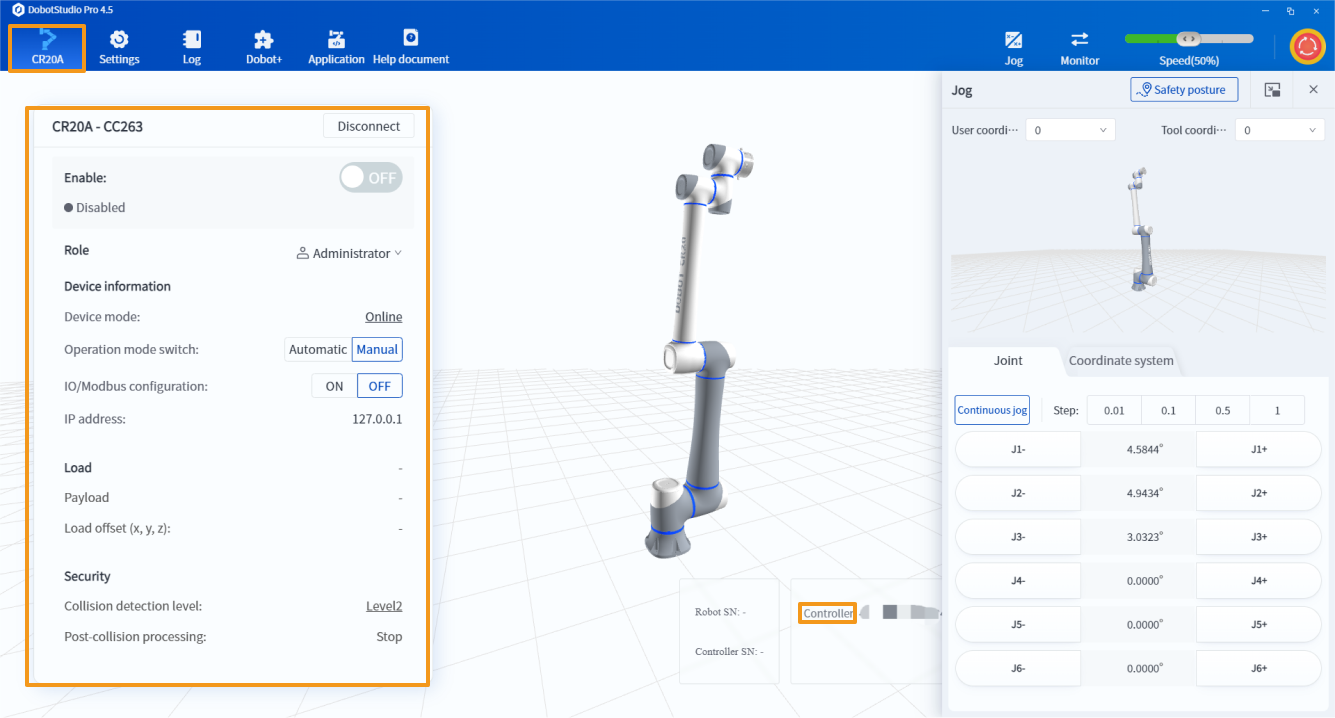
연결되면 소프트웨어의 인터페이스는 아래 그림과 같습니다. 아래 그림의 우측 하단의 컨트롤러 버전을 확인할 수 있습니다.
네트워크 연결 설정하기
하드웨어 연결하기
네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고, 다른 쪽 끝을 로봇 컨트롤러 캐비닛 뒤면의 LAN 네트워크 포트에 삽입하십시오.
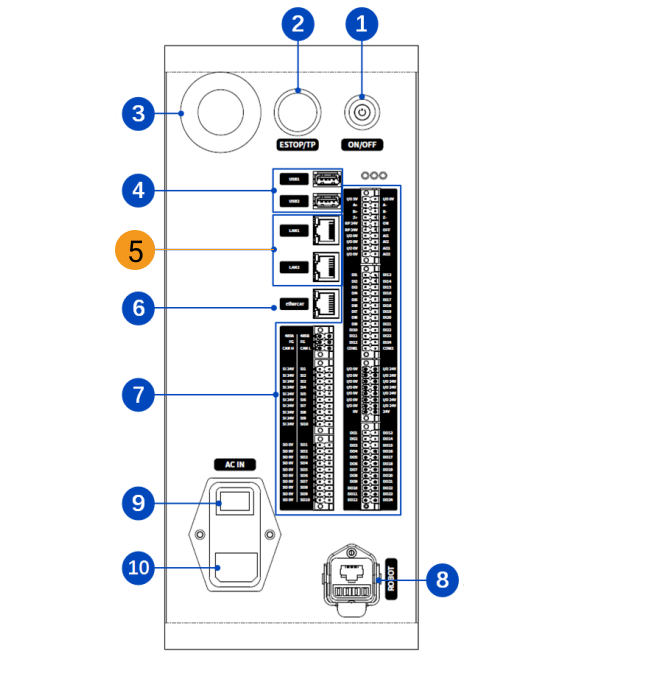
⑤ LAN 네트워크 포트 표시됩니다.
IP 주소 설정하기
-
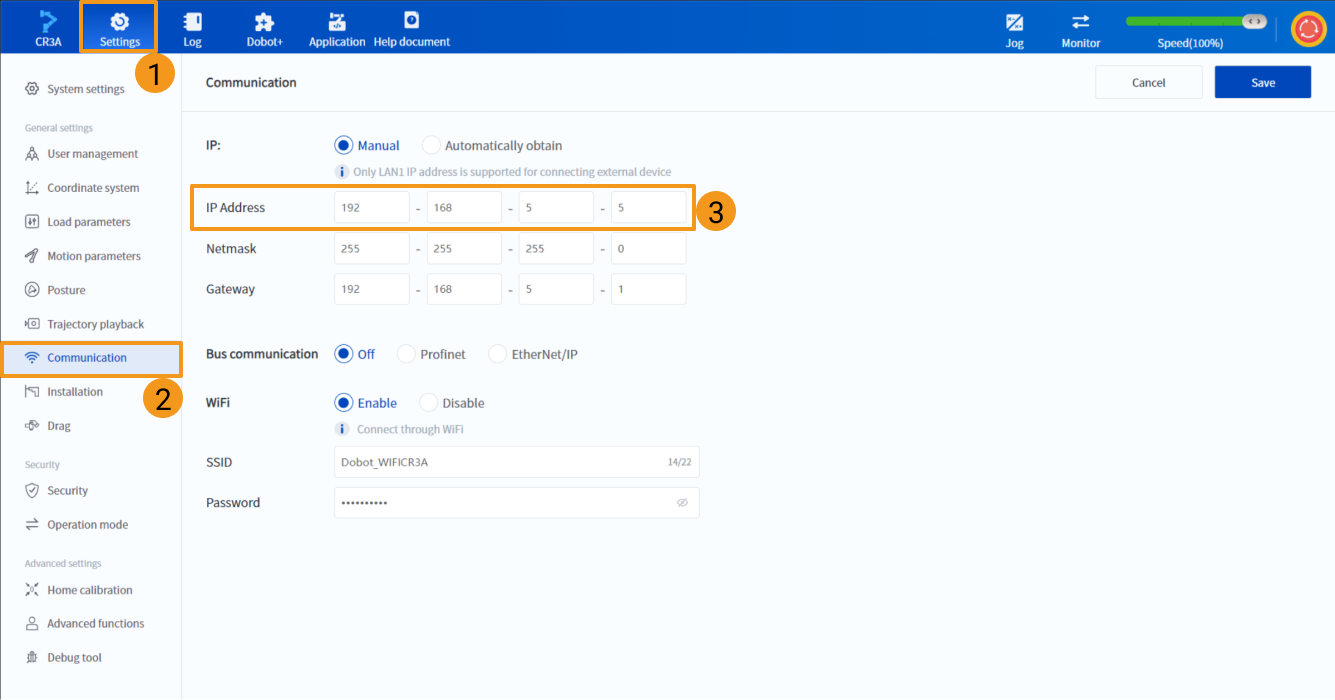
DobotStudio Pro 소프트웨어 상단 툴 바에서 Settings 버튼을 클릭하십시오.
-
Settings 페이지의 좌측 네비게이션 바에서 Communication를 클릭하십시오. Communication 탭의 Communication영역에서 로봇의 IP 주소를 설정하십시오. 로봇의 IP 주소와 IPC의 IP 주소는 동일한 네트워크 세그먼트에 있어야 합니다. 즉, 두 IP 주소의 네트워크 부분과 서브넷 마스크가 동일해야 합니다. 예를 들어, 192.168.100.2/255.255.255.0 및 192.168.100.3/255.255.255.0은 동일한 네트워크 세그먼트에 있습니다.
| 이 스텝 시작하기 전에 DobotStudio Pro 소프트웨어를 사용하여 로봇에 연결되었는지 확인하십시오. 로봇 연결 스텝은 컨트롤러 버전 확인하기영역 스텝1을 참조하십시오. |
"로봇 통신 구성" 설정
-
Mech-Vision 소프트웨어를 시작합니다. 표시되는 인터페이스에 따라 다음의 적절한 방법을 선택하여 솔루션을 생성하십시오.
-
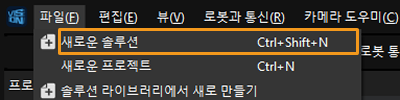
시작 화면이 나타나면 새로운 솔루션 만들기를 클릭하여 새로운 솔루션을 만듭니다.

-
메인 인터페이스가 나타나면 메뉴 바에서 을 차례로 클릭하여 새로운 솔루션을 만듭니다.
-
-
Mech-Vision 툴 바에서 로봇과 통신 - 로봇 통신 구성을 클릭합니다.
-
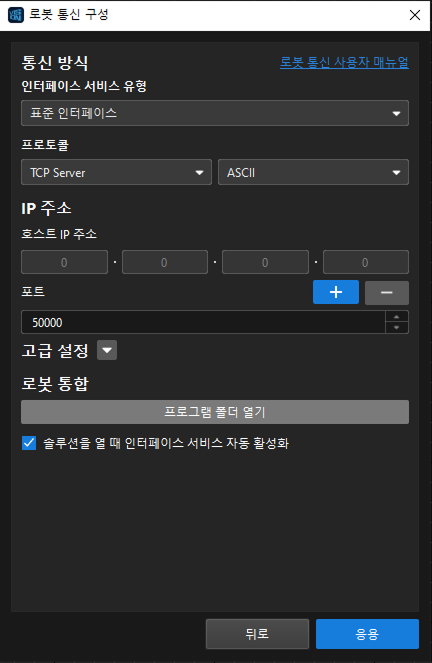
로봇 통신 구성 창에서 다음 구성을 수행합니다.
-
로봇 선택 드롭다운 디렉터리를 클릭하고 목록에 있는 로봇 을 선택한 다음 로봇 모델 선택을 클릭하여 로봇 모델을 선택합니다. 그 다음에 다음을 클릭합니다.
-
통신 방식 화면에서 인터페이스 서비스 유형을 표준 인터페이스로 선택하고, 프로토콜을 TCP Server로 선택하며 프로토콜 형식을 ASCII으로 선택합니다.
-
포트 번호는 50000 및 이상으로 설정하는 것이 좋습니다. 설정된 포트 번호를 다른 프로그램이 사용하고 있지 않은지 확인해야 합니다.
-
로봇 통합 에서 프로그램 폴더 열기를 단번 클릭합니다.
이후 로드를 위해 필요한 파일이 이 폴더에서 복사됩니다. 이 폴더를 닫지 마십시오. -
(선택 사항) 솔루션을 열 때 인터페이스 서비스 자동 활성화 를 선택합니다.
-
응용을 클릭합니다.
-
-
Mech-Vision 메인 화면에서 툴 바에 있는 “인터페이스 서비스” 기능이 활성화되어 있는지 확인하십시오.
로봇에 파일을 플래싱하기
-
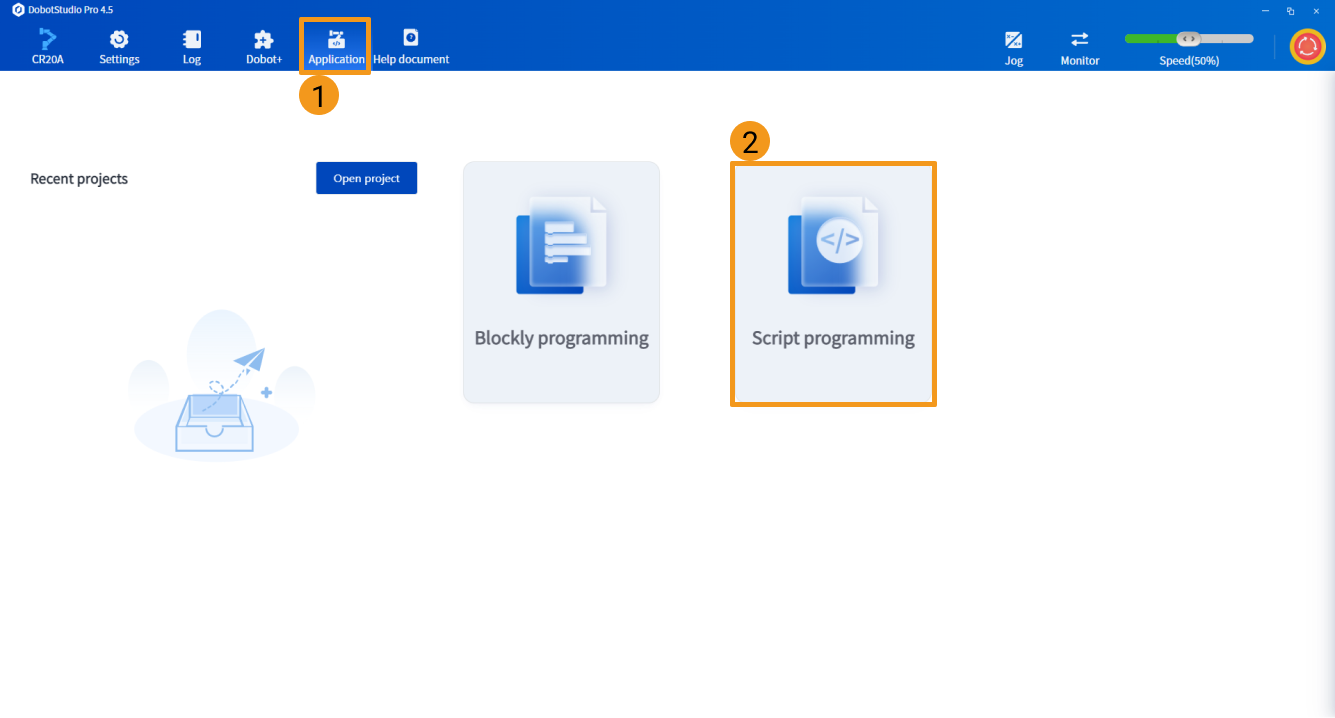
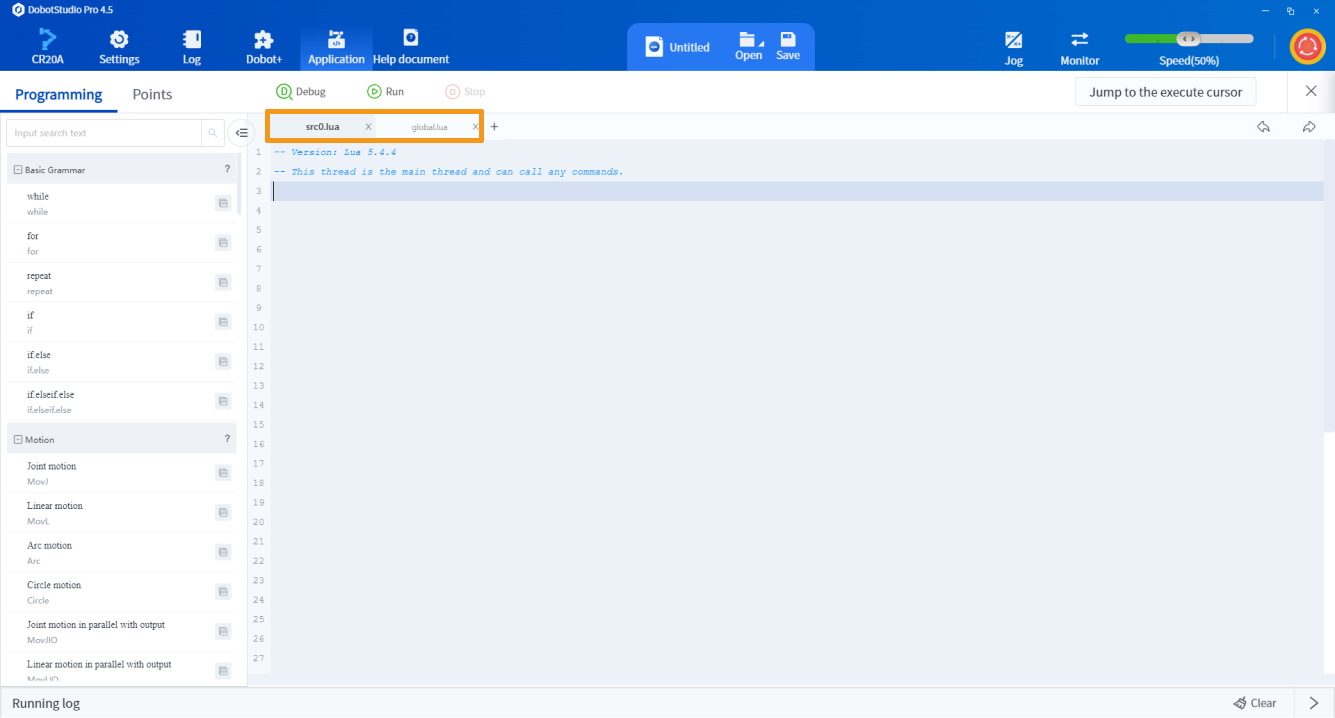
DobotStudio Pro 소프트웨어 메인 인터페이스에서 Application 버튼을 클릭하십시오. Application 페이지에서 Script programming를 클릭하여 스크립트 프로그래밍 프로젝트를 새로 만듭니다. 새로 만든 스크립트 프로그래밍 프로젝트에서 아래 그림과 같이 src0.lua와 global.lua 두 개의 공백 파일 포함됩니다.
이 스텝 시작하기 전에 DobotStudio Pro 소프트웨어를 사용하여 로봇에 연결되었는지 확인하십시오. 로봇 연결 스텝은 컨트롤러 버전 확인하기영역 스텝1을 참조하십시오. -
열린 플래싱 프로그램 폴더(
DOBOT폴더)에서CRA폴더에 있는 global.lua 파일을 엽니다. global.lua 파일의 있는 모든 내용을 스크립트 프로그래밍 프로젝트의 동명 파일인 global.lua로 복사합니다.플래싱 프로그램 폴더는 Mech-Vision 및 Mech-Viz 설치 디렉토리의 통신 구성 요소/Robot_Interface/DOBOT경로에서 찾을 수 있습니다.
표준 인터페이스 통신 테스트
-
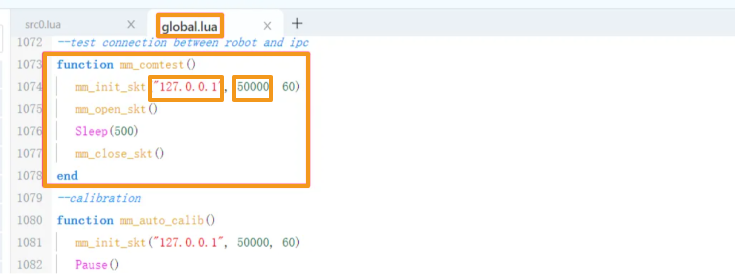
DobotStudio Pro 소프트웨어의 스크립트 프로그래밍 인터페이스로 들어가고 gobal.lua 파일에서 mm_comtest 함수를 찾아 mm_init_skt 함수 파라미터의 IP 주소와 포트 번호를 IPC의 IP 주소와 포트 번호로 수정하십시오.
-
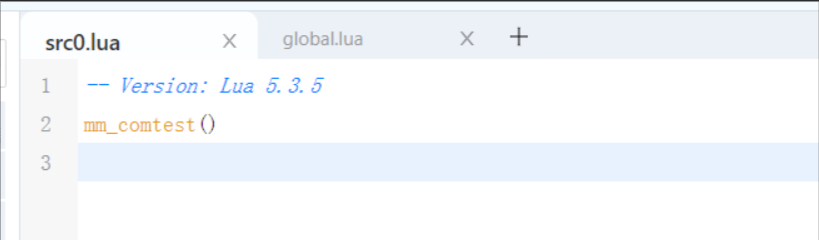
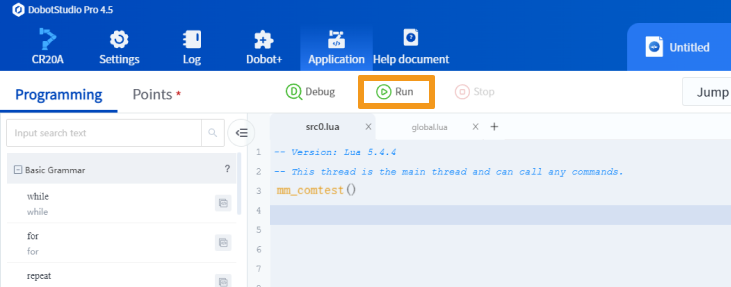
src0.lua 파일을 열고 이 파일에서 mm_comtest 함수를 호출하십시오.
-
아래 그림 화면의 버튼을 클릭하여 로봇을 작동시켜 전원을 켭니다.

-
Run 버튼을 클릭하여 현재 프로그램을 실행하십시오.
-
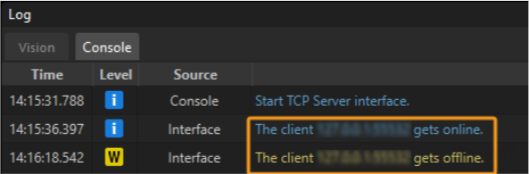
Mech-Vision 아래 내용 표시되면 정상적으로 연결이 된다는 뜻입니다.