샘플 프로그램1:MM_S1_Vis_Basic
프로그램 소개
기능 설명 |
로봇이 Mech-Vision 프로젝트 실행을 트리거하고 비전 결과 획득하여 피킹 및 배치 작업을 수행합니다. |
파일 경로 |
Mech-Vision 및 Mech-Viz의 설치 디렉터리로 이동하여 |
필요한 프로젝트 |
Mech-Vision 프로젝트 |
사용 조건 |
|
| 이 샘플 프로그램은 참고용으로 제공됩니다. 사용자는 실제 상황에 맞춰 이 내용을 바탕으로 수정해야 하며, 해당 프로그램을 그대로 사용하지 않도록 하십시오. |
프로그램 설명
다음에는 MM_S1_Vis_Basic 샘플 프로그램의 코드와 관련 설명입니다.
— This is a LUA program.
require("MM_Module")
IP_Address = "192.168.1.8"
Server_Port = 50000
Time_Out = 60
--initialize communication parameters (initialization is required only once)
MM_Init_Socket(IP_Address,Server_Port,Time_Out)
--close socket connection
MM_Close_Socket()
--open socket connection
MM_Open_Socket()
--switch recipe of NO.1 Mech-Vision project
TOP_Status=MM_Switch_Model(1,1)
print("Vision system status code:",TOP_Status)
---check whether the recipe is switched successful
if TOP_Status ~= 1107 then
print("Abnormal vision system status!!!",TOP_Status)
Pause()
end
--trigger NO.1 Mech-Vision project
TOP_Status = MM_Start_Vis(1,1,1,JP[100])
print("Vision system status code:",TOP_Status)
--check whether the Mech-Vision project has been triggered successfully
if TOP_Status ~= 1102 then
print("Abnormal vision system status!!!",TOP_Status)
Pause()
end
--get vision result from NO.1 Mech-Vision project
TOP_Status,TOP_Last_Data,TOP_Pos_Num = MM_Get_VisData(1)
print("Vision result:",TOP_Status,TOP_Last_Data,TOP_Pos_Num)
--check whether vision result has been got successfull
if TOP_Status ~= 1100 then
print("Failed to obtain vision result!!!",TOP_Status)
Pause()
end
--save first vision point data to local variables
MM_Get_Pose(1,20,50,60)
local pose1 = NewPose(0, 0, 200, 0, 0, 0)
--move to approach waypoint of picking
MovL(PR[20],{cnt = -1,uof = pose1})
--move to picking waypoint
MovL(PR[20],{cnt = -1})
--add object grasping logic here, such as "setdo DO_1, 1
Pause()
--move to departure waypoint of picking
MovL(PR[20],{cnt = -1,uof = pose1})위 샘플 프로그램 코드에 해당하는 워크플로는 아래 그림에 표시되어 있습니다.
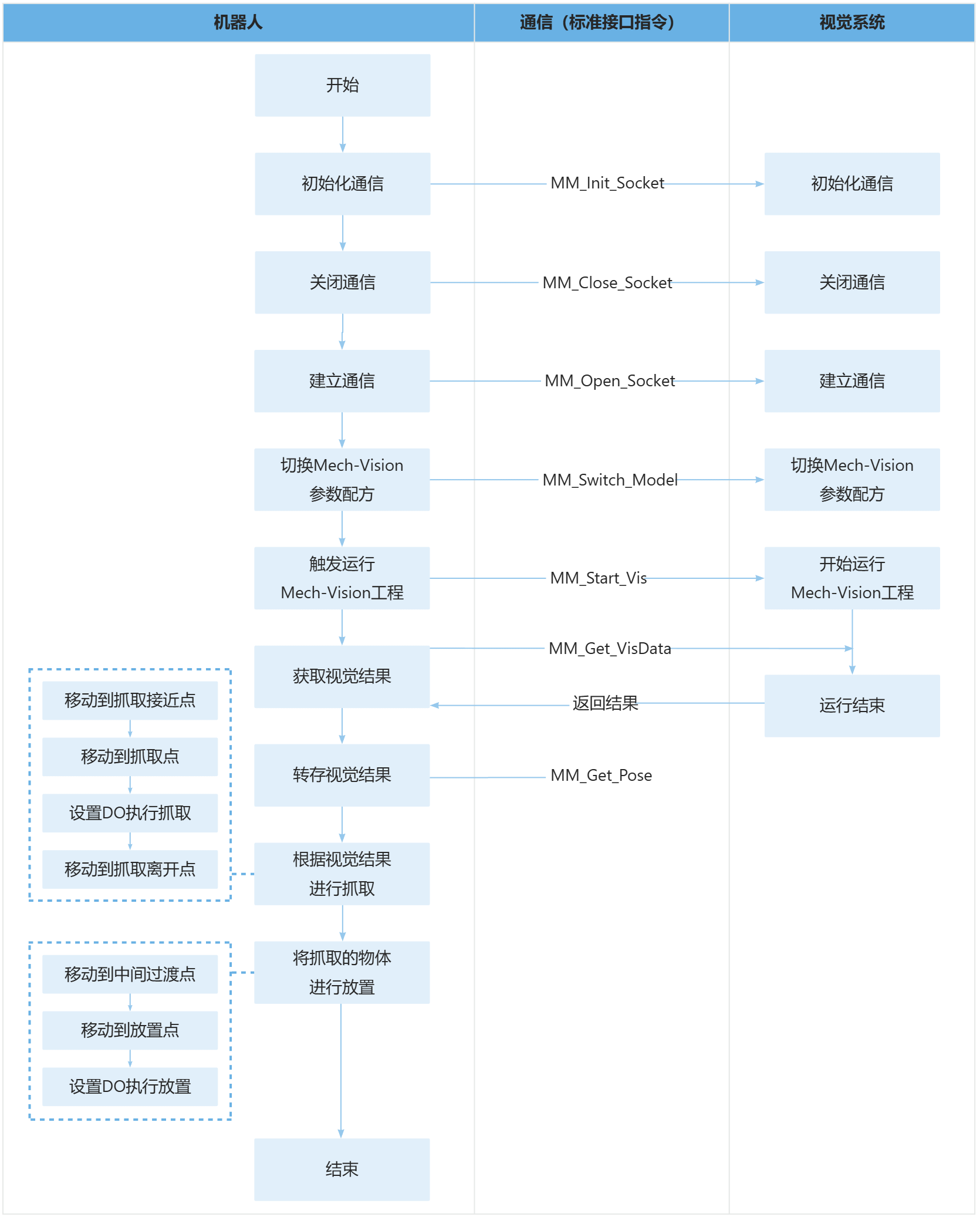
아래 표는 위 프로그램에 대한 설명입니다. 명령어 이름의 링크를 클릭하면 해당 명령의 상세 설명을 확인할 수 있습니다.
| 워크플로 | 코드와 설명 | ||
|---|---|---|---|
MM_Module 헤더 파일 가져오기 |
|
||
초기화 및 통신 구축하기 |
먼저 통신을 종료한 후 다시 연결하여 연결 중인 프로젝트가 없는지 확인합니다. |
||
Mech-Vision 파라미터 레시피를 전환하기 |
|
||
상태 코드를 출력하고 검증하기 |
|
||
Mech-Vision 프로젝트 실행을 트리거하기 |
|
||
상태 코드를 출력하고 검증하기 |
|
||
비전 결과 획득하기 |
이 명령어는 로봇이 비전 시스템에 실행 번호 1인 Mech-Vision 프로젝트를 트리거하여 Mech-Vision 프로젝트가 모든 비전 포인트를 반환할 것으로 예상하는 것을 나타냅니다. |
||
비전 결과를 출력하고 검증하기 |
|
||
비전 결과를 덤프하기 |
이 명령어는 첫 번째 비전 포인트의 말단장치 포즈, 라벨 및 말단장치 번호를 각각 지정된 레지스터로 전송하는 명령어입니다. |
||
피킹 웨이 포인트 위로 이동하기 |
|
||
피킹 웨이 포인트로 이동하기 |
로봇은 직선 이동 방식으로 피킹 접근 웨이 포인트에서 피킹 웨이 포인트로 이동합니다. |
||
“DO 설정”을 통해 피킹을 수행하기 |
로봇이 피킹 웨이포인트로 이동한 후, DO 명령어(예: “setdo DO_1, 1”)를 설정하여 말단 장치를 제어하고 피킹를 수행합니다. 사용자는 실제 상황에 맞게 DO 설정 작업을 추가해야 합니다.
|
||
피킹 출발 웨이포인트로 이동하기 |
로봇이 피킹 웨이포인트 위로 어딘가에 이동합니다. 즉 피킹 출발 웨이포인트로 이동합니다.
|