EFORT 자동 캘리브레이션
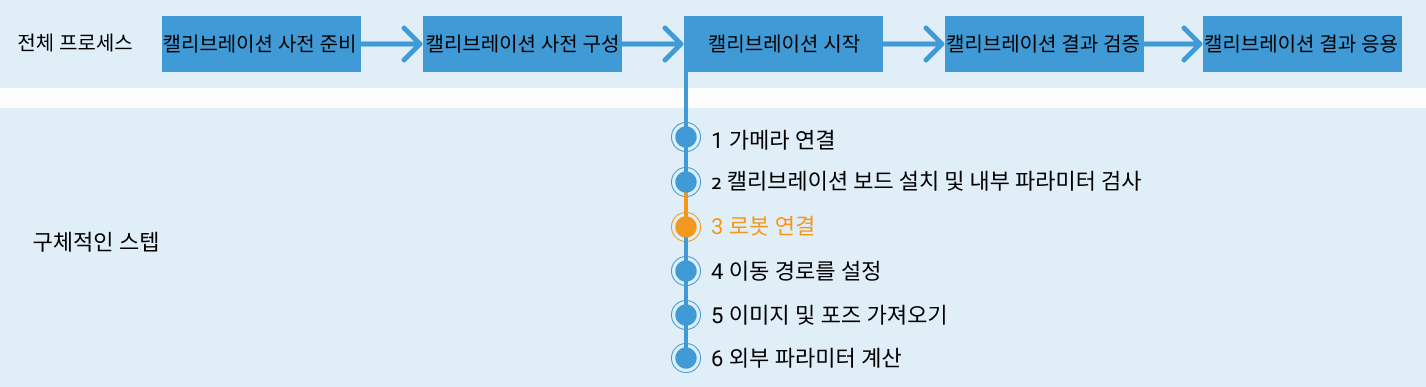
표준 인터페이스 통신을 설정한 후, 로봇을 연결하여 자동 캘리브레이션을 수행할 수 있습니다. 자동 캘리브레이션의 전체적인 프로세스는 아래 그림과 같습니다.
특별 참고사항
캘리브레이션을 실행할 때 "로봇을 연결하기" 스텝에서 Mech-Vision 소프트웨어 화면에서 로봇이 연결되기를 기다리는 중... 버튼이 나타나면 사용자는 아래 스텝에 따라 로봇 측에서 작업을 수행해야 하며, 작업 완료 후 Mech-Vision 소프트웨어에서 나머지 단계를 스텝을 진행하십시오.
|
1. 캘리브레이션 프로그램 선택 및 수정
-
티치 펜던트 화면에서 좌측 상단 홈 아이콘을 클릭한 후, TCP IP을 클릭하십시오.
티치 펜던트 화면에 TCP IP가 표시되지 않으면, 태스크 패널의 설정을 클릭합니다. 좌측 네비게이션 바에서 애플리케이션 선택를 클릭하고, 오른쪽 애플리케이션 목록에서 TCP IP를 체크한 후 저장을 클릭합니다. 로봇을 재시작하면 화면에 TCP IP가 표시됩니다.

-
아래 화면에서 통신 파라미터를 설정한 후 저장을 클릭합니다.
-
프로토콜 유형: 클라이언트를 선택합니다.
-
소켓 번호: 소켓 1을 선택합니다. 여기의 소켓 번호는 MM_Init_Socket 명령어의 첫 번째 파라미터 값과 일치해야 합니다.
-
서버 IP: IPC의 IP 주소를 입력합니다.
-
포트: 50000. 만약 Mech-Vision에서 설정한 호스트 포트 번호가 변경되었다면, 여기서의 포트 번호 50000도 Mech-Vision에서 설정된 호스트 포트 번호와 일치하도록 수정해야 합니다.
-
시간 초과: 50000 마이크로초.
-
하트비트 시간: 10000 마이크로초.
-
시작 문자: 비워 둡니다.
-
종료 문자: CR($R)를 체크합니다.

-
-
아래 화면에서 가져온의
MM_Module.XPL파일을 선택한 후 열기를 클릭합니다.
-
프로그램 화면에서 MM_Auto_Calib를 선택한 후 편집을 클릭합니다. 실제 상황에 따라 첫 번째 줄과 다섯 번째 줄 명령어의 파라미터를 수정한 다음 저장을 클릭합니다.
-
MM_InitSocket: 첫 번째 파라미터 값은 소켓 번호와 일치해야 합니다.
-
MM_Calibration: 각 파라미터의 의미는 명령어 설명을 참조하십시오.

-
2. 티치 펜던트를 통해 캘리브레이션 시작점 설정
-
수동으로 로봇을 캘리브레이션의 시작점으로 이동합니다.
시작점 위치는 캘리브레이션 보드의 포인트 클라우드 품질을 확인할 때 로봇이 있는 위치로 설정할 수 있습니다.
-
아래 화면에서 세 번째 줄을 선택한 후 편집을 클릭합니다.

-
확인을 클릭하면 캘리브레이션 시작점 위치가 변수 Calibration에 저장되며, 마지막으로 저장를 클릭합니다.

3. 캘리브레이션 프로그램 실행
-
커서를 프로그램 첫 줄로 이동한 후 Set PC를 클릭합니다.

-
키 스위치를 자동(Auto) 모드로 전환한 후, 티치 펜던트의 PWR 기능 키를 눌러 서보 전원을 켭니다. 그런 다음 티치 펜던트의 ▸(Start/시작) 키를 눌러 프로그램을 실행합니다。
-
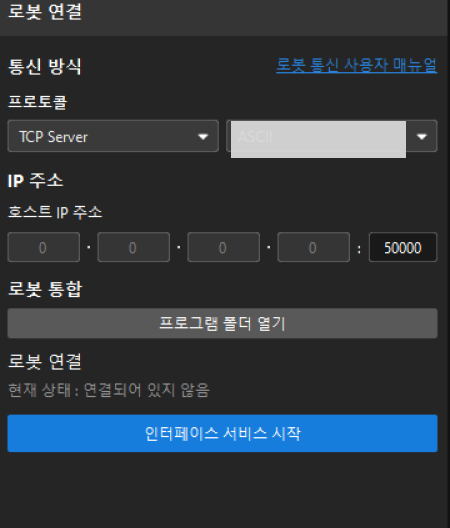
Mech-Vision의 캘리브레이션 창을 확인하고 로봇 연결 영역에 "연결됨" 상태 정보가 표시된 후 버튼이 로봇이 연결되기를 기다리는 중...에서 연결 끊기로 변경된 후 하단 바에서다음 버튼을 클릭합니다.
-
아래 링크를 각각 참고하여 캘리브레이션 시작 중 네 번째 스텝(이동 경로 설정)과 후속 워크플로를 실행하십시오.