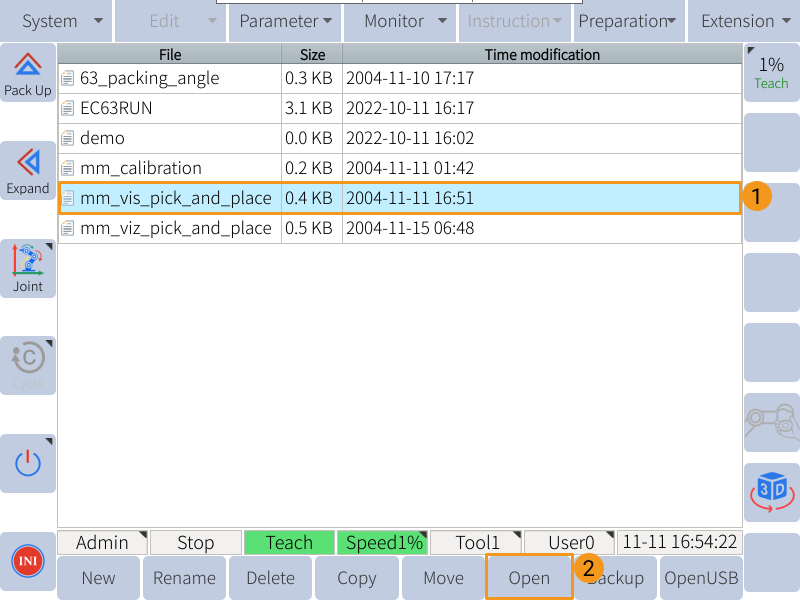
mm_vis_pick_and_place
이 예시 프로그램은 Mech-Vision 이미지 캡처를 트리거하고 로봇을 피킹 포즈로 이동시킵니다.
|
Lua 스크립트 프로그램드은 백그라운드에서 계속 실행되며, 그렇지 않으면 로봇과 연결 못 합니다. |
프로그램 워크플로 소개
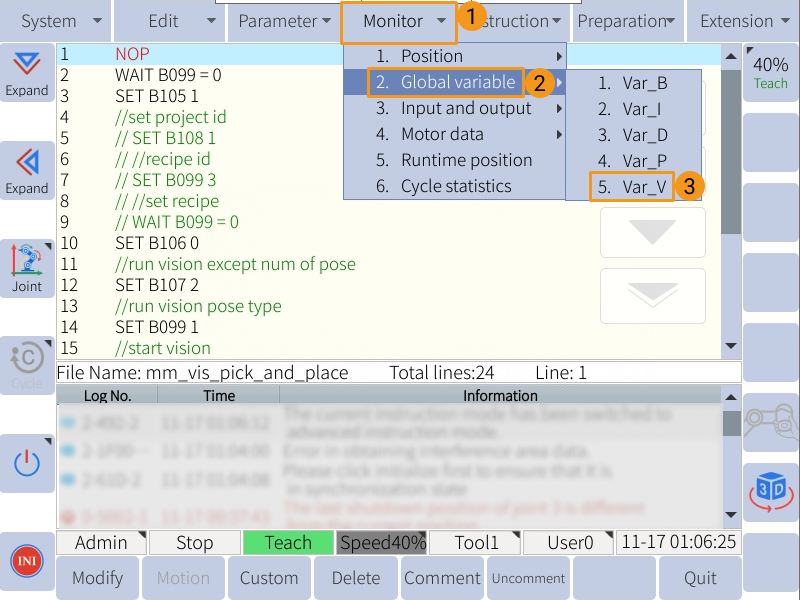
NOP
WAIT B099 = 0
SET B105 1
//set project id
// SET B108 1
// //recipe id
// SET B099 3
// //set recipe
// WAIT B099 = 0
SET B106 0
//run vision expect num of pose
SET B107 2
//run vision pose type
SET B099 1
//start vision
WAIT B099 = 0
SET B099 2
//receive from vision
WAIT B099 = 0
SET B099 8
//set pose to v101-v120
WAIT B099 = 0
// MOVL V101 V=100MM/S CR=0.000MM
END-
3번째 줄: 프로젝트 번호 1의 Mech-Vision 프로젝트를 유발해야 할 프로젝트로 설정합니다.
-
5번째 줄: Mech-Vision 프로젝트 레시피를 설정해야 하는 경우 여기에 프로젝트 레시피 번호를 지정할 수 있습니다.
-
7번째 줄: 필요함에 따라 지정한 Mech-Vision 프로젝트 레시피로 전환할 수 있습니다.
-
10번째 줄: Mech-Vision 전송된 모든 비전 포인트를 획득합니다.(최대 20개까지 획득할 수 있습니다).
-
12번째 줄: Mech-Vision에 보낼 포즈 유형을 TCP로 지정합니다.
-
14번째 줄: Mech-Vision 프로젝트 실행을 트리거합니다.
-
17번째 줄: 비전 포인트를 획득합니다.
-
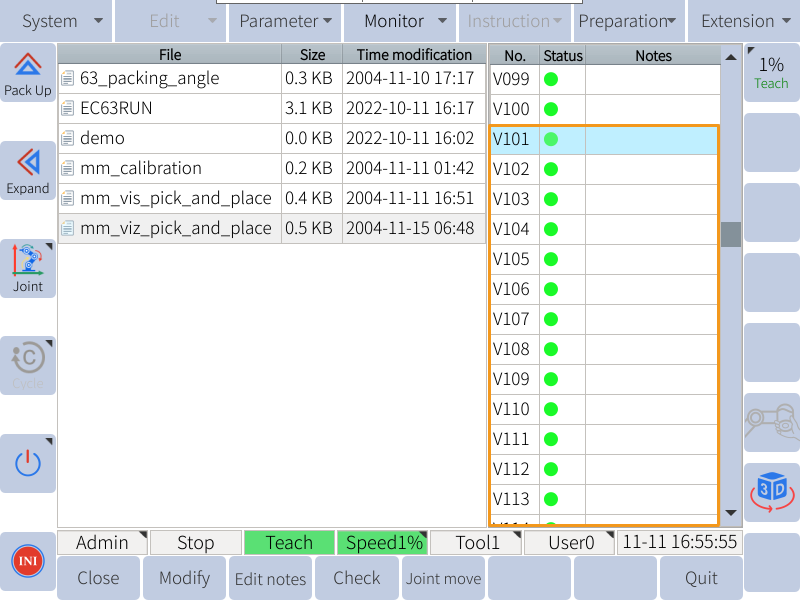
20번째 줄: Mech-Vision에서 획득한 비전 포인트를 V101-V120 변수에 저장합니다.
-
23번째 줄: 로봇을 비전 포인트로 이동시킬 수 있는 이동 명령어를 추가할 수 있습니다.