点群前処理
使用シーン
このステップの組合わせは、通常 カメラから画像を取得 ステップの後に使用され、元の点群の前処理を行い、後続のステップの処理時間を短縮することができます。
処理流れとパラメータ調整
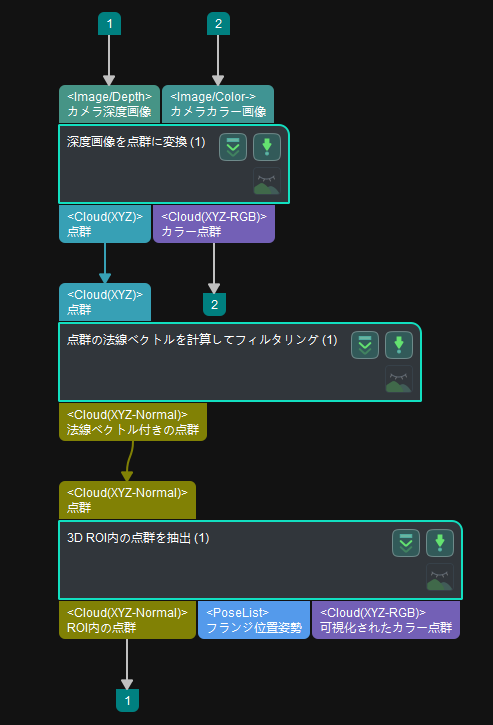
処理流れは、 深度画像を点群に変換 、 点群の法線ベクトルを計算してフィルタリング 、 3D ROI内の点群を抽出 で構成されています。
深度画像を点群に変換
まず、元のカラー画像と深度画像を 深度画像を点群に変換 ステップに入力し、シーンの点群を出力します。
不要な点群を除去するために、2D ROIを設定する必要があります。「2D ROIを設定」をクリックし、表示される画面で2D ROIを設定します。
点群の法線ベクトルのを計算してフィルタリング
次に、シーンの点群を 点群の法線ベクトルを計算してフィルタリング ステップに入力し、法線ベクトルを計算して不要な点を除去し、フィルタリング後の法線ベクトル付きの点群を出力します。
3D ROI内の点群を抽出
最後に前のステップで処理された点群を 3D ROI内の点群を抽出 ステップに入力し、関心領域(ROI)の設定により、ROI内の点群を抽出して出力します。
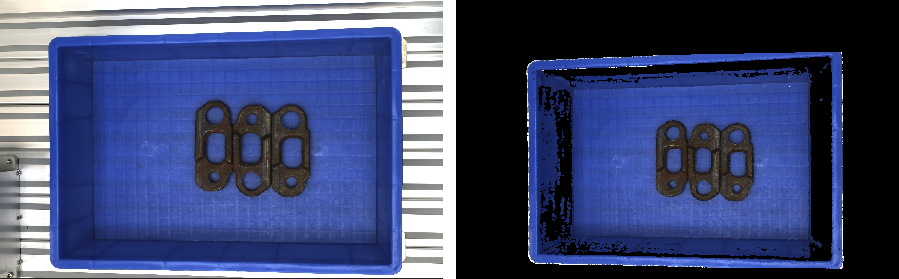
点群前処理を行う前と後の効果を下図に示します。左側は前処理前の点群であり、関心領域を設定することはなく、不要なシーンの点群を含んでいます。右側は前処理後の点群であり、関心領域を設定して不要な点群が除去され、後のステップ処理を容易にします。
パラメータの調整説明
3D ROI内の点群を抽出
- 3D ROIを使用
-
初期値:チェックを入れる。
調整説明:チェックを入れると、3D ROIが使用されます。
- 3D ROI内の最小点数
-
初期値:0
調整説明:3D ROI内の点がこの値より少ない場合、点群は返されません。
- 3D ROI内の点が空であるかどうかを送信
-
初期値:チェックを入れる。
調整説明:このパラメータにチェックを入れると、3D ROI内の点群が空であるかどうかを判断し、結果を送信します。
深度画像を点群に変換
- 深度画像による背景を除去
-
初期値:チェックを入れない。
調整説明:このパラメータは背景除去に使用されます。チェックを入れると、入力深度画像は背景画像と比較し、深度差が背景深度の変動範囲内であれば、背景が除去されることになります。
- 深度背景画像のファイル名
-
調整説明:右側にある 2D ROIを設定 をクリックし、表示される画面で背景を設定します。
- 背景深度の変動
-
初期値:10mm
調整説明:このパラメータは、背景深度の変動のしきい値を設定するために使用されます。背景画像との深度差がこの値より小さい点は除去されます。
点群の法線ベクトルのを計算してフィルタリング
- 法線ベクトルを計算するときの半径
-
初期値:5.00 mm
調整説明:この半径範囲にある点は、法線ベクトルを計算するために使用されます。
- 法線ベクトルの計算方法
-
初期値:CloudPreprocessingGPU
調整説明:このパラメータは、法線ベクトルの計算方法を選択するために使用されます。