「ドリフト自動補正」機能を導入した後に新しいワークを追加する際の必要な操作
背景
「ドリフト自動補正」 が導入された作業セルにおいて、新たに別の型番のワークを追加する際に、ティーチング法を使用して新ワークの把持位置姿勢を作成しました。このティーチングプロセスには、すでにビジョンシステムのドリフト補正が含まれています。その状態でビジョンシステムドリフトを再度補正すると、「二重補正」が発生してしまいます。このため、新ワークのデータ(点群モデルまたは把持位置姿勢)に対して「ドリフト逆補正」を実行する必要があります。
準備作業
「ドリフト逆補正」を実行する前に、「ドリフト自動補正」機能を使用して以下の準備を完了してください。
-
キャリブレーションボールの位置姿勢データ取得
-
補正モデルの生成
これにより、補正モデルが現在の作業セルの最新のドリフト状態を正確に反映していることを確認します。
操作手順
「ドリフト自動補正」機能の用途に応じて、「ドリフト逆補正」の操作手順が異なります。
-
点群のドリフト補正に使用する場合:ティーチング法で新ワークの点群モデルを作成する際に、既に「ドリフト正補正」された点群モデルを直接インポートするだけで操作は完了します。その他の操作は不要です。
-
把持位置姿勢のドリフト補正に使用する場合:新ワークの把持位置姿勢に対して「ドリフト逆補正」を実行する必要があります。以下の操作手順に従ってください。
-
「ドリフト逆補正」プロジェクトを追加します。
こちら をクリックしてプロジェクトをダウンロードして展開し、現在のソリューション内にコピーします。
-
「ドリフト逆補正」プロジェクトを調整します。
-
ファイルから位置姿勢を読み取る(Teaching Pose of New Workpiece)ステップで、「位置姿勢ファイルパス」を新ワークの中心点ファイルが保存されているパスに設定します。

-
ファイルから位置姿勢を読み取る(Drift Correction Model)」ステップで、「位置姿勢ファイルパス」を補正モデルファイルが保存されているパスに設定します。

-
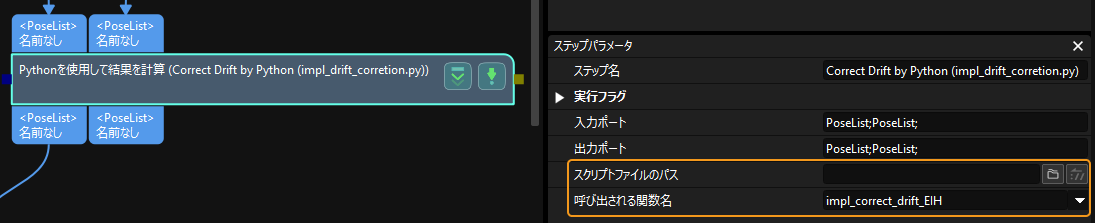
Pythonを使用して結果を計算(Correct Drift by Python)ステップで、「スクリプトファイルのパス」と「呼び出される関数名」を設定します。この関数名は、「Vis_ComputeDriftCorrectionModel」プロジェクト内の「Pythonを使用して結果を計算」ステップで呼び出す関数名と一致させる必要があります。
-
-
「ドリフト逆補正」プロジェクトを実行します。
-
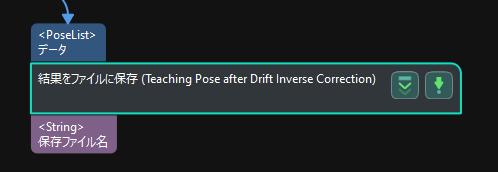
プロジェクトを実行した後、「結果をファイルに保存(Teaching Pose after Drift Inverse Correction)」ステップで保存された位置姿勢ファイルが「ドリフト逆補正」後のワークの把持位置姿勢となります。
-
この位置姿勢ファイルは、ティーチングで取得した位置姿勢ファイルと同じ名前にして、既存の位置姿勢ファイルを置き換えてください。
-
-