仅使用 Mech-Vision 发送视觉点
本节详细介绍一个仅使用 Mech-Vision 发送视觉点的 Adapter 样例程序。
背景介绍
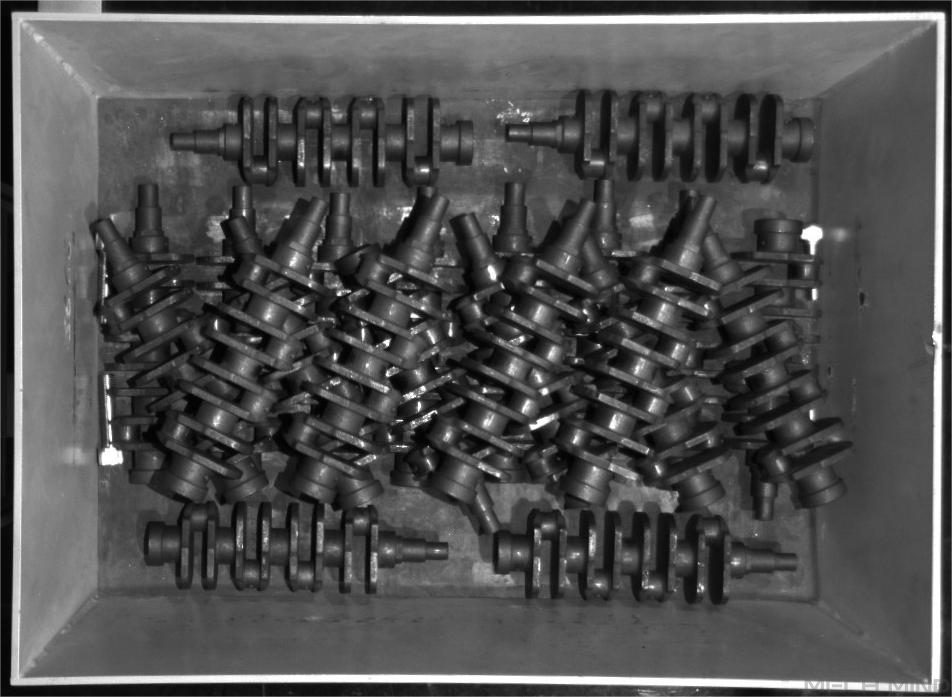
本样例针对曲轴上料的应用场景,相机固定安装在料筐上方支架上,Mech-Vision 进行拍照并输出一个可抓工件的坐标给机器人端。
本样例使用 Mech-Vision 内置的示例工程“大尺寸非平面工件”( )。
该工程采用 3D 模板匹配的算法,对不同的工件需要设置不同的模板文件和抓取点。因此,需要在 Mech-Vision 中设置参数配方,配方编号(工件编号)在机器人端发送拍照指令时进行设置。
通信方案
机器人与安装Mech-Vision和Mech-Viz软件的工控机采用 TCP/IP Socket 协议进行通信,通信格式为 ASCII 字符串,使用英文逗号(,)作为数据分隔符。
其中,视觉系统作为通信的服务端,机器人作为客户端。
通信流程如下图所示。
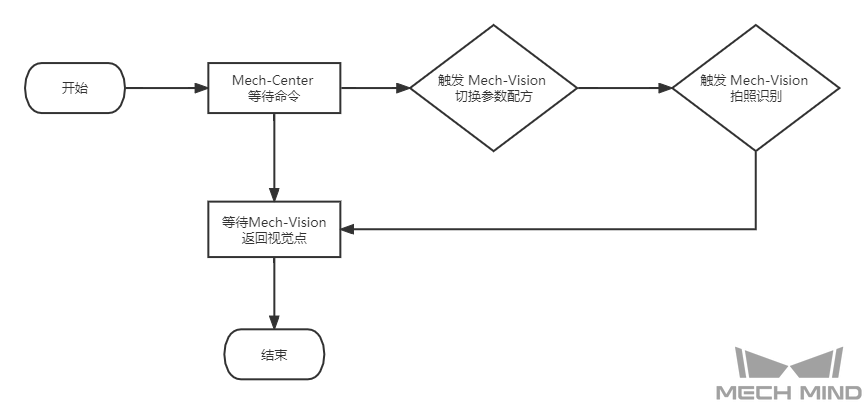
通信流程详细描述如下:
-
Mech-Center 等待机器人发送拍照指令
P和配方编号。 -
Mech-Center 触发 Mech-Vision 切换参数配方。
-
Mech-Center 触发 Mech-Vision 拍照识别。
-
Mech-Vision 拍照识别成功后,返回状态码和视觉点给 Mech-Center。
-
Mech-Center 将状态码和视觉点返回给机器人。
|
为了方便机器人抓取,Mech-Center 将待抓工件位姿转换为机器人TCP位姿。 |
通信报文格式
具体通信报文格式如下表所示。
| 请求命令 | 工件编号 | |
|---|---|---|
发送(机器人 → 工控机) |
|
整数,取值范围: 1~100 |
状态码 |
视觉点(TCP坐标) |
|
接收(工控机 → 机器人) |
整数,取值范围:0~4,0-正常识别;1-错误的命令码;2-Vision 工程未注册;3-无视觉点;4-无点云 |
6个浮点型数据,以逗号(,)隔开,格式为:x,y,z,a,b,c |
|
响应报文的长度固定。如果响应报文的状态码为异常码(1~4),视觉点数据用 0 补齐。 |
通信报文样例
请求报文
P,1正常响应报文
0,1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517|
本样例中,Mech-Vision 识别正常,返回的 TCP 坐标为:1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517。 |
异常响应报文:错误的命令码
1,0,0,0,0,0,0异常响应报文:Vision 工程未注册
2,0,0,0,0,0,0异常响应报文:无视觉点
3,0,0,0,0,0,0异常响应报文:无点云
4,0,0,0,0,0,0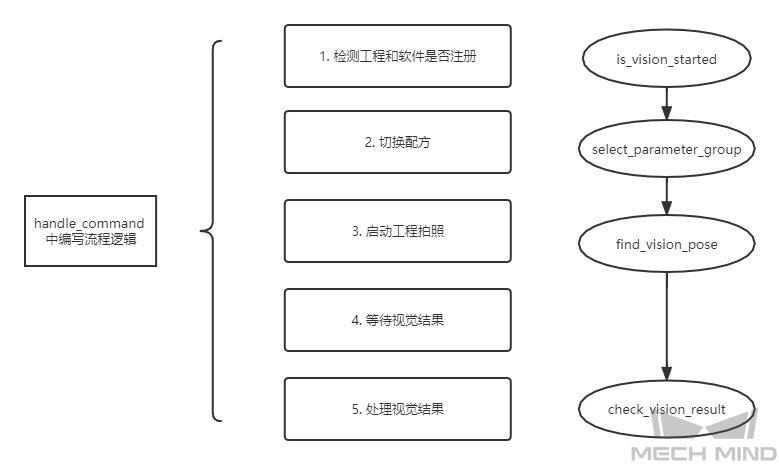
样例程序详解
|
点击下载 Adpater 样例程序 。 |
引入 Python 包
导入 Adapter 程序依赖的所有模块。
import json
import logging
import math
import sys
from time import sleep
import os
sys.path.append(os.path.abspath(os.path.join(os.path.dirname(__file__), "..", "..")))
from transforms3d import euler
from interface.adapter import TcpServerAdapter, TcpClientAdapter
from util.transforms import object2tcp定义类
定义继承“TcpServerAdapter”父类的“TestAdapter”子类。
class TestAdapter(TcpServerAdapter):
vision_project_name = "Large_Non_Planar_Workpieces"
# vision_project_name = 'Vis-2StationR7-WorkobjectRecognition-L1'
is_force_real_run = True
service_name = "test Adapter"
def __init__(self, address):
super().__init__(address)
self.robot_service = None
self.set_recv_size(1024)|
本样例将 Adapter 程序定义为 TCP/IP Socket 通信的服务端。 |
设置接收指令与处理逻辑
设置接收请求(包括拍照指令和参数配方)的处理逻辑。
# Receive command _create_received_section
def handle_command(self, cmds):
photo_cmd, *extra_cmds = cmds.decode().split(',')
recipe = extra_cmds[0]
# Check command validity _check_cmd_validity_section
if photo_cmd != 'P':
self.msg_signal.emit(logging.ERROR, 'Illegal command: {}'.format(photo_cmd))
self.send(('1' + '' + '').encode())
return
# Check whether vision is registered _check_vision_service_section
if not self.is_vision_started():
self.msg_signal.emit(logging.ERROR, 'Vision not registered: {}'.format(self.vision_project_name))
self.send(('2' + '' + '').encode())
return
# Change TODO parameter "extra_cmds" according to actual conditions
sleep(0.1) # wait for a cycle of getting in Vision
# _check_vision_result_function_section
try:
result = self.select_parameter_group(self.vision_project_name, int(recipe) - 1)
if result:
result = result.decode()
if result.startswith("CV-E0401"):
self.send(('5' + '' + '').encode())
return
elif result.startswith("CV-E0403"):
self.send(('5' + '' + '').encode())
return
raise RuntimeError(result)
except Exception as e:
logging.exception('Exception happened when switching model: {}'.format(e))
self.send(('5' + '' + '').encode())
return
self.show_custom_message(logging.INFO, "Switched model for project successfully")
self.msg_signal.emit(logging.WARNING, 'Started capturing image')
try:
self.check_vision_result(json.loads(self.find_vision_pose().decode()))
except Exception as e:
self.msg_signal.emit(logging.ERROR, 'Calling project timed out. Please check whether the project is correct: {}'.format(e))
self.send(('2' + '' + '').encode())|
“handle_command”函数作为 TCP/IP Socket 服务端接收报文的处理入口。 |
定义 Mech-Vision 视觉结果检查
设置 Adapter 检查 Mech-Vision 输出的视觉结果。
# Check vision results
def check_vision_result(self, vision_result, at=None):
noCloudInRoi = vision_result.get('noCloudInRoi', True)
if noCloudInRoi:
self.msg_signal.emit(logging.ERROR, 'No point clouds')
self.send(('4' + '' + '').encode())
return
poses = vision_result.get('poses')
labels = vision_result.get('labels')
if not poses or not poses[0]:
self.msg_signal.emit(logging.ERROR, 'No visual points')
self.send(('3' + '' + '').encode())
return
self.send(self.pack_pose(poses, labels).encode())
self.msg_signal.emit(logging.INFO, 'Sent TCP successfully')设置视觉点输出格式
设置视觉点的对外输出格式。
# Pack pose _pack_pose_section
def pack_pose(self, poses, labels, at=None):
pack_count = min(len(poses), 1)
msg_body = ''
for i in range(pack_count):
pose = poses[i]
object2tcp(pose)
t = [p * 1000 for p in pose[:3]]
r = [math.degrees(p) for p in euler.quat2euler(pose[3:], 'rzyx')]
p = t + r
self.msg_signal.emit(logging.INFO, 'Sent pose: {}'.format(p))
msg_body += ('{:.4f},' * (len(p) - 1) + '{:.4f}').format(*p)
if i != (pack_count - 1):
msg_body += ','
return '{},'.format(0) + msg_body + ''定义 Adapter 的关闭操作
定义如何关闭 Adapter。
def close(self):
super().close()