Issues with “Target Object Selection and Recognition” Process
This section covers common issues regarding the “Target object selection and recognition” process and the corresponding possible causes and solutions.
No Recognition Result
-
Symptom
The “Target object selection and recognition” process produced no recognition result.
-
Possible causes
-
If Assist recognition with deep learning is enabled, there may be no recognition result from deep learning.
-
If Confidence threshold is set too high, the correct recognition result will be eliminated.
-
The point cloud model did not match the target object to be recognized.
-
-
Solutions
-
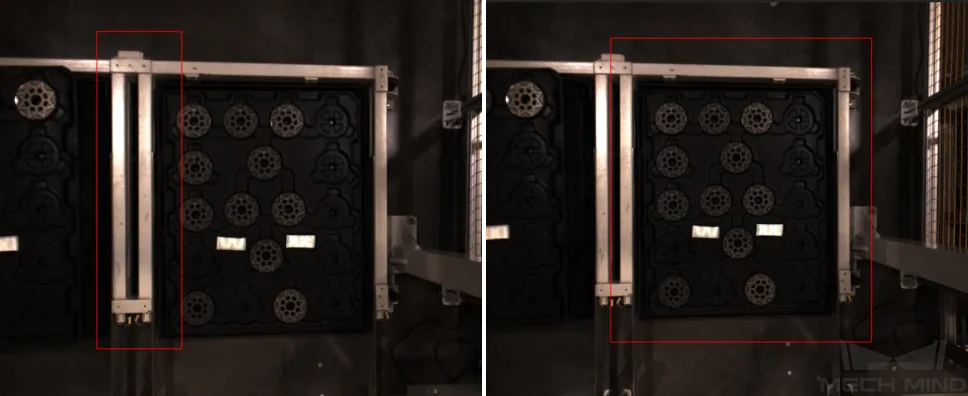
If Assist recognition with deep learning is enabled, you can check if the selected deep learning model package is correct and the ROI settings are appropriate. The figure below shows the incorrect ROI (left) and the correct ROI (right).
-
Set an appropriate Confidence threshold according to the actual situation.
-
Ensure that the point cloud model matches the target object to be recognized.
-
False Negative (FN)
-
Symptom
The object recognition result contains FNs.
-
Possible causes
-
If Confidence threshold is set too high, the correct recognition result will be eliminated.
-
The point clouds of some target objects are highly incomplete.
-
If Overlap ratio threshold is set too low, the recognition result of some minor overlaps will be eliminated.
-
-
Solutions
-
Set an appropriate Confidence threshold according to the actual situation.
-
Investigate the causes for missing point clouds to improve point cloud quality. If FNs still cannot be avoided, try enabling Assist recognition with deep learning.
-
Disable Remove overlapped poses or increase the Overlap ratio threshold.
-
False Recognition
-
Symptom
During the target object recognition process, the point cloud model was misaligned with the target object point cloud, or the background point cloud was mistaken for the target object point cloud.
-
Possible causes
-
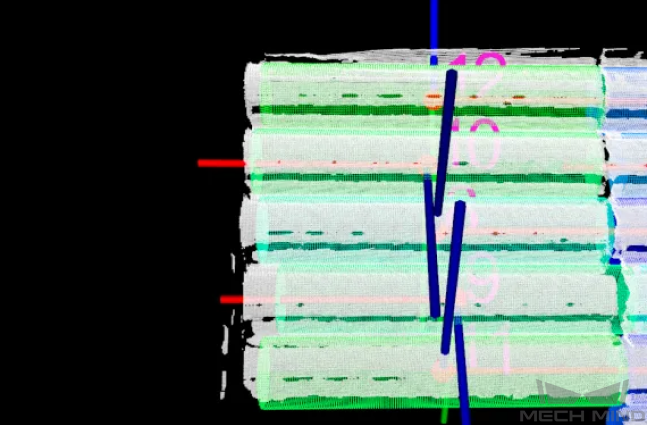
The point cloud model was clearly misaligned with the point clouds of narrow and long objects.
-
The front and back or the two ends of the objects are not identical but similar, which resulted in incorrect recognition of the front and back of the objects or incorrect recognition of the large and small ends of the objects.
-
The background point cloud was not removed, and it was mistakenly recognized as the point cloud of target objects.
-
-
Solutions
-
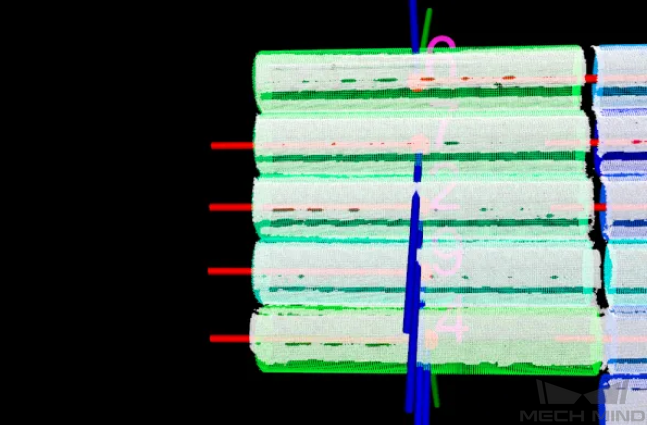
For narrow and long objects, follow the steps below to improve the matching accuracy.
-
Optimize the recognition parameters and set the Performance mode of coarse matching and fine matching to High accuracy and the Deviation correction capacity of fine matching to Medium. The above parameters are visible in the Advanced mode.
-
Enable Enable augmentation for long thin objects under the “Augment long thin objects” parameter group. This parameter is visible in the Advanced mode.
-
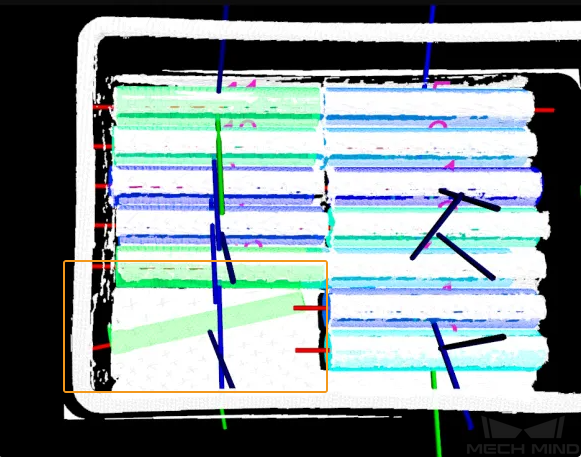
Enable Assist recognition with deep learning.
The recognition result after optimization is shown in the figure below.
-
-
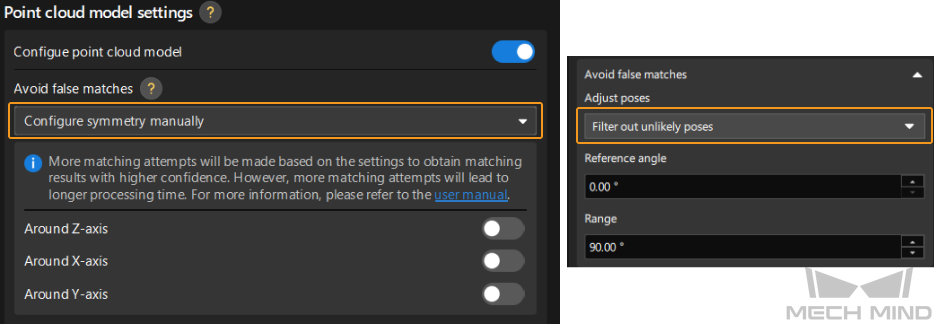
Enable the Configure point cloud model in Target Object Editor to filter matching results by Configure symmetry manually. Then, enable Advanced mode in the “Target object selection and recognition” process of the “3D Target Object Recognition” tool and adjust the “Adjust or filter poses from coarse matching” parameters to avoid mismatching by Filter potentially false matches.
-
Enable Assist recognition with deep learning to recognize targets with the help of deep learning to avoid interference from the background point cloud.
-
Long Recognition Time
-
Symptom
It took a long time to recognize target objects.
-
Possible causes
-
The 3D ROI in the “Point Cloud Preprocessing” Step was not set properly, and the background point cloud was not removed.
-
The recognition parameters were not set properly.
-
The Enable extra fine matching option was enabled.
-
-
Solutions
-
Set a proper 3D ROI in the “Point Cloud Preprocessing” process to remove the background point cloud and keep only the point cloud of the target object.
-
Improve recognition parameters. If the recognition accuracy meets the requirement, you can set the Performance mode of coarse Matching and fine Matching to High speed or Standard to shorten the cycle time. The above parameters are visible in the Advanced mode.
-
Disable Enable extra fine matching under the “Extra fine matching” parameter group.
-