TM Standard Interface Commands
The 6 available Standard Interface components are as follows.
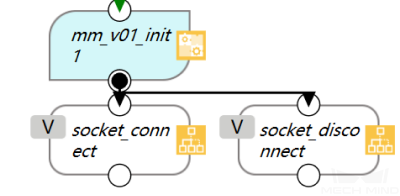
Initialize Communication (MM init)
This component is used to initialize network communication, and it must be added just after the Start Node.
Please refer to Configure the IP Address of the IPC to modify the IP address of the IPC.
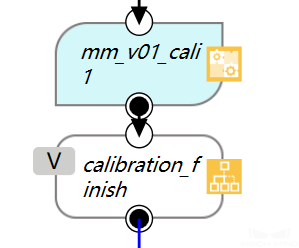
Calibration (MM calibration)
This component is used for camera calibration. It defines the entire process of camera calibration and does not contain adjustable parameters.
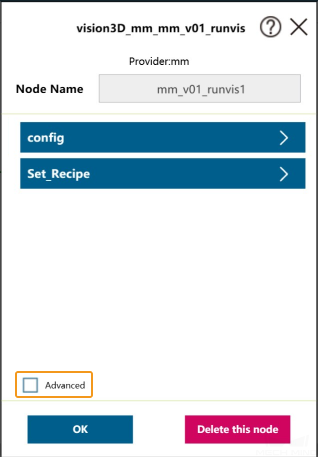
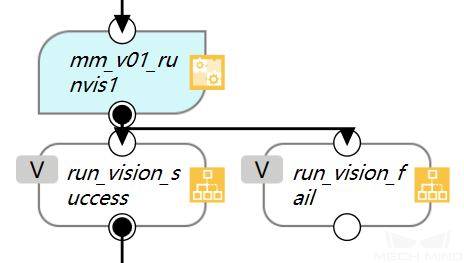
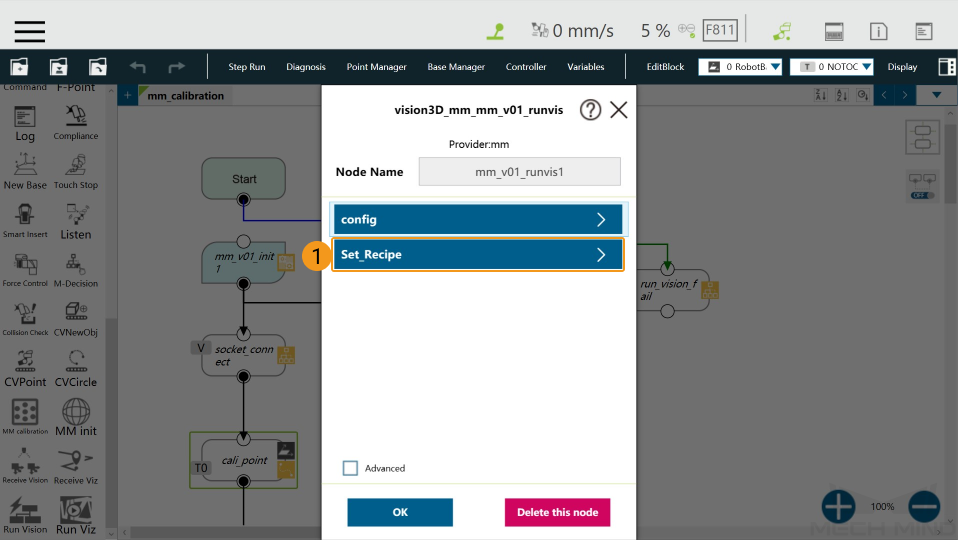
Start Mech-Vision Project (Run Vision)
This component is used to start the Mech-Vision project.
Parameters
-
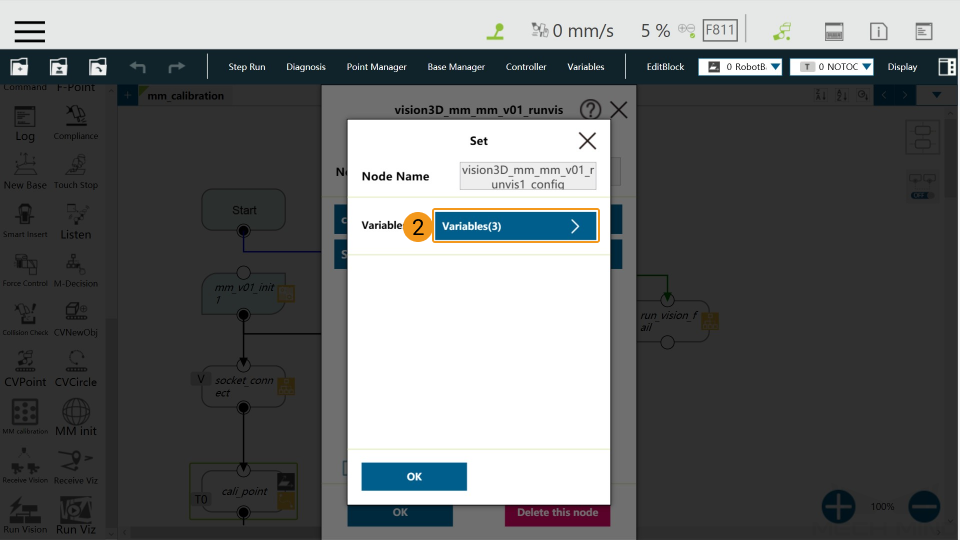
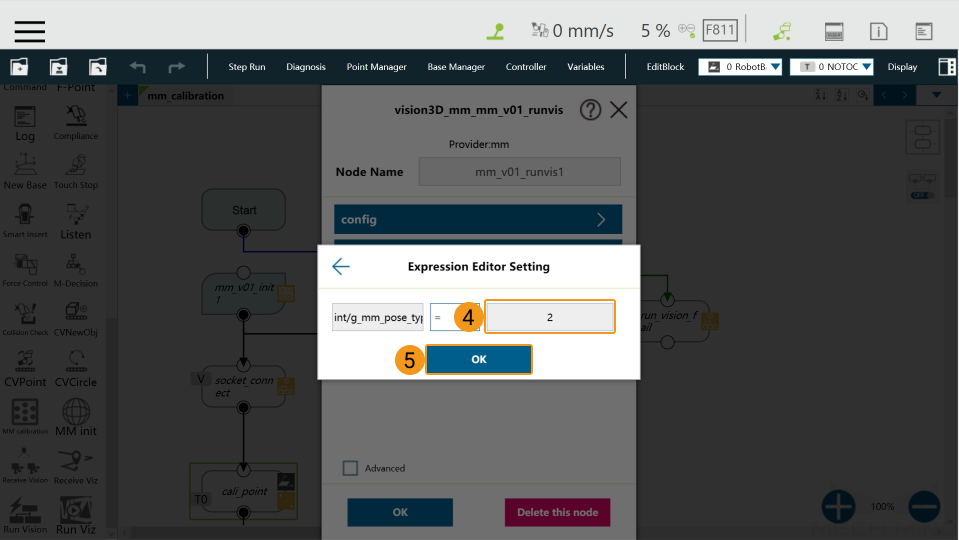
config
-
g_mm_pose_type: Robot pose type. Valid values: 1 and 2. A value of 1 indicates joint positions. A value of 2 indicates TCP
-
g_mm_point_number: Number of vision points
-
g_mm_project_ID: Mech-Vision project ID
-
-
Set_Recipe
-
g_mm_whether_set_recipe: Whether to switch the recipe. true indicates to switch the recipe. false indicates not to switch the recipe
-
g_mm_recipe_ID: Recipe ID
-

Start Mech-Viz Project (Run Viz)
This component is used to start the Mech-Viz project.
Parameters
-
Config
-
g_mm_runviz_pose_type: Robot pose type. Valid values: 1. A value of 1 indicates joint positions
-
g_whether_after_161: Whether the Mech-Vision and Mech-Viz version is later than 1.6.1. true indicates yes and false indicates no
-
-
Set_Branch
-
g_mm_whether_set_branch: Whether to set the branch. true indicates to set the branch. false indicates not to set the branch
-
g_mm_branch_task_ID: Step ID of the “Branch by Msg” Step
-
g_mm_branch_out_port: Exit port number
-
-
Set_Index
-
g_mm_whether_set_index: Whether to set the index. true indicates to set the index. false indicates not to set the index
-
g_mm_index_task_ID: Step ID of the index-type Step
-
g_mm_index_value: Index value
-
Get Vision Target(s) (Receive Vision)
This component is used to obtain the vision result from the corresponding Mech-Vision project. The sub-node it takes depends on the status code it received.
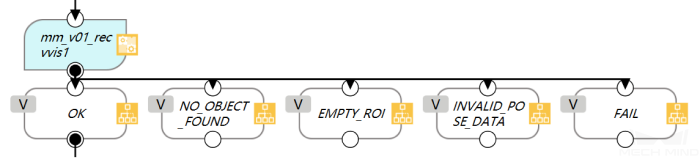
After the execution of this component is complete, the vision result returned from Mech-Vision will be stored in the global variable g_mm_socket_recv_array as strings. You can process the data in the variable according to specific requirements.
Sub-Nodes and the Corresponding Status Codes:
-
NO_OBJECT_FOUND : 1002
-
EMPTY_ROI : 1003
-
INVALID_POSE_DATA : 1006
Get Planned Path (Receive Viz)
This component is used to obtain the planned path from Mech-Viz.
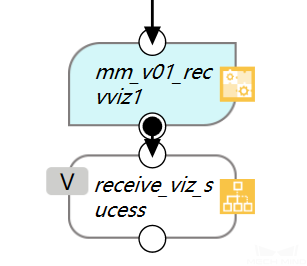
After the execution of this component is complete, the results returned from Mech-Viz will be stored in the global variable g_mm_socket_recv_array as strings. You can process the data in the variable according to specific requirements.
All waypoints are stored in the global variable g_mm_total_point as strings. The first 6 elements in the array represent the first waypoint, and the 7th to 12th elements represent the second waypoint, and so on. The number of waypoints will be added 1 every after 6 elements. You can assign values to the elements in the array to guide the robot to move.
In addition, this component provides a variable g_mm_recv_viz_time that is used to store the number of triggering as integers. The value of the variable starts from 0, indicating that the Get Planned Path component is triggered once. If the component is triggered twice, the variable value will be 1.
Precautions
Drag a component to the Flow Editing Area. Click the  in the upper left corner of the node, and select Advanced in the pop-up window. Click the parameters with send and recv one by one, and select vision3D_mm_mm_v01_init1_ntd_mm in the Network windows. Make sure that the network settings of all components are the same.
in the upper left corner of the node, and select Advanced in the pop-up window. Click the parameters with send and recv one by one, and select vision3D_mm_mm_v01_init1_ntd_mm in the Network windows. Make sure that the network settings of all components are the same.