How Can the Standard Interface Programs for FANUC Robots be Run in the Background?
For FANUC robots, a Standard Interface program can contain a primary program and a secondary program. When the primary program calls the secondary program, the primary program is considered a foreground program, while the secondary program is considered as a background program that needs to automatically run after the robot system starts. This guide mainly describes how to create a Standard Interface background program for a FANUC robot and allows the program to run in the background.
| Before you begin, please ensure that FANUC Standard Interface communication is set up. |
-
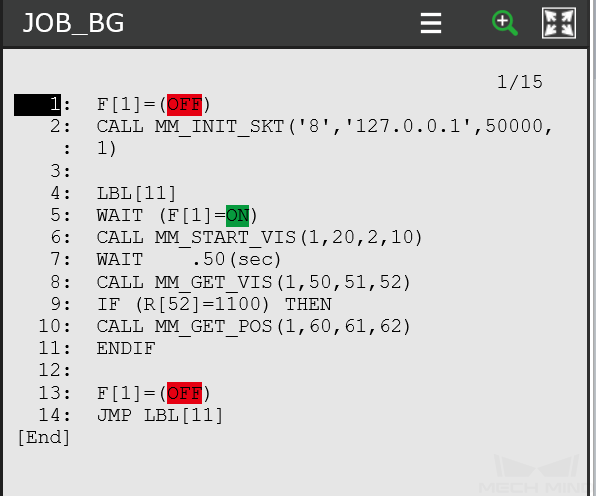
Create a program that can be run in the background. For example, the sample code shown in the following figure indicates to trigger the Mech-Vision project to run and obtain the vision result.
-
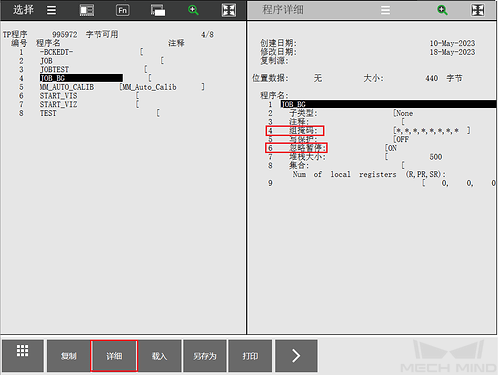
Select the program and select Detail. Then, change all entries for Group Mask to * to indicate that this program does not occupy any motion group and set Ignore Pause to ON to indicate that this program will ignore external pause signals.
-
Create a foreground program file and write the program code based on the actual workflow. For example, the sample code in the following figure indicates that the foreground program calls the RUN command to run the background program when F[1] is set to ON.
The RUN command triggers the background program to run but does not stop the foreground program. 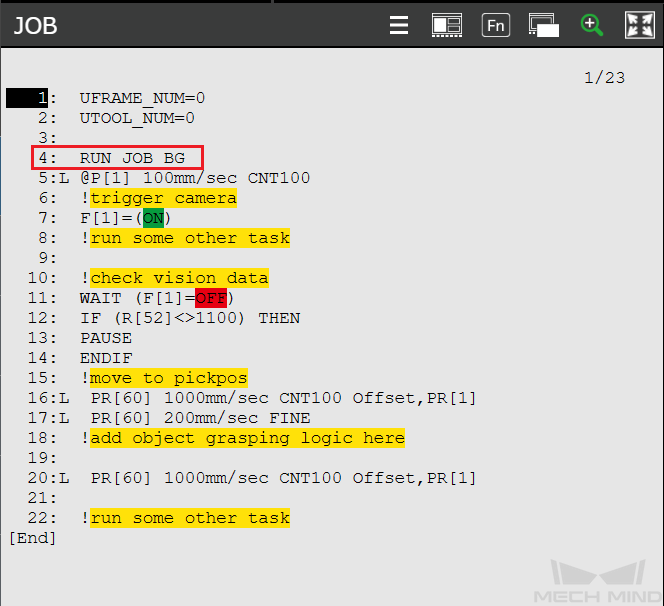
-
For information about how to run the foreground program, see Run Calibration Program.