建系操作指南
坐标系
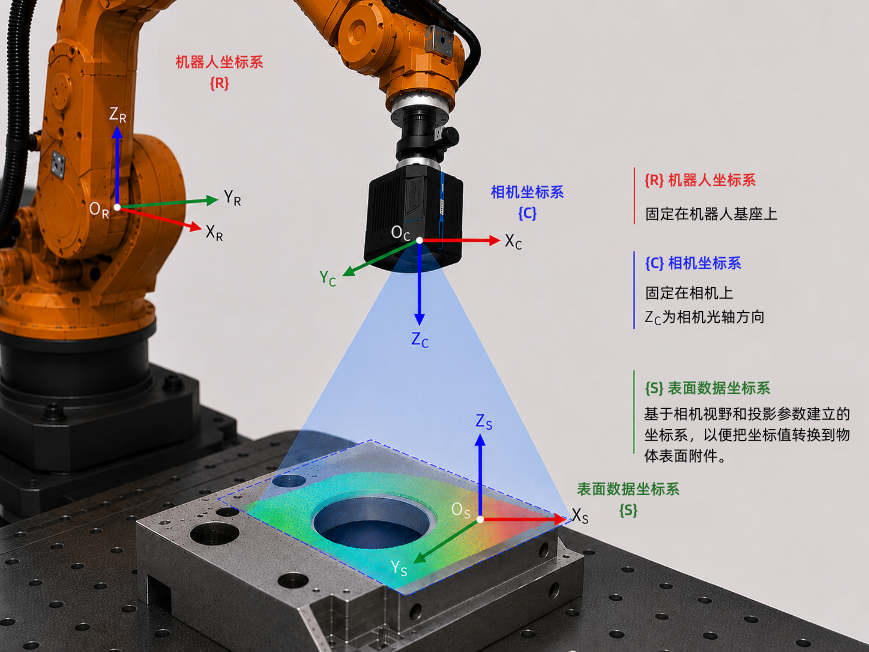
建系涉及以下三种坐标系:
|
部署在线测量应用时,还需要理解以下坐标系与机器人坐标系的关系,从而理解测量值是如何产生的:
-
相机坐标系{C}:固定在相机上,原点通常位于相机光心,Z轴为相机光轴方向。
-
表面数据坐标系{S}:由相机成像与投影参数确定,用于表达工件表面点云与测量特征。
三者在在线测量中的关系可概括为:
-
先在表面数据坐标系{S}中获得测量点与特征结果。
-
再通过相机参数将数据转换到相机坐标系{C}。
-
最后基于机器人手眼标定结果(外参)将数据转换到机器人坐标系{R}。
可将坐标转换链路理解为:{S} → {C} → {R}。
建系操作的本质是:在测量值已经位于机器人坐标系的基础上,进一步建立机器人坐标系与车身坐标系之间的关系,使测量值可转换到车身坐标系并与名义值进行比较。
建系方式
Mech-Metrics支持两种建系方式:工件建系和工装建系。建系方式的选择应与三坐标设备的建系方式保持一致。
|
| 工件在在线测量系统中的放置状态应与工件在三坐标设备中的放置状态保持一致(平躺或竖直放置)。 |