位置合わせパラメータグループ
以下では、位置合わせパラメータグループの使用方法について説明します。
使用シーン
ワークの画像データを取得する際、毎回ワークの位置が完全に一致することは難しいです。以下のような状況が発生する可能性があります。
-
並進:ワークがX軸、Y軸またはZ軸方向に平行移動します。
-
回転:ワークがZ軸を中心に一定の角度で回転します。
これらの問題に対処し、後続の測定の一致性を保つために、以下の2つの方法が使用されます。
-
入力データの位置合わせ
画像やデータの位置ずれを補正するため、ワークの代表的な特徴を抽出してマッチングテンプレートを作成し、そのテンプレートを用いてワークの位置を補正できます。ワークの位置がどのように変化しても、位置合わせ後は常に同じ位置に配置されるため、後続の測定処理への影響を防ぎ、安定した測定を実現できます。
-
特徴領域を変換
通常、特徴領域はワークの位置変化に自動的に対応しません。ワークの位置が変わると、特徴領域を手動で調整する必要があります。ワークの位置変化に応じて特徴領域が自動的に変化するようにするため、ワークの並進や回転情報を抽出し、これに基づいて特徴領域を回転または並進させ、常に正確に目標領域をカバーできるようにします。
これにより、ワークの位置変化情報を含むデータセットが 位置合わせパラメータグループ となります。簡単に言うと、位置合わせパラメータグループ は、ワークの位置が変化した際に特徴領域が適切に変化し、測定の一致性を確保する役割を果たします。
| 位置合わせパラメータグループ は通常、ステップ内で特徴領域を使用している場合にのみ有効です。その役割は、特徴領域の位置を調整することです。しかし、サーフェス軌跡を測定 ステップでも位置合わせパラメータグループを使用して軌跡線の位置を調整できます。 |
位置合わせパラメータグループの取得方法
現在、以下の方法で位置合わせパラメータグループを取得することがサポートされています。
「位置合わせパラメータグループを抽出」ステップを使用
位置合わせパラメータグループを抽出 ステップを使用することで、位置合わせパラメータグループ を直接作成できます。
| 位置合わせパラメータグループの抽出の目的は、設定した特徴領域がワークの位置変化に合わせて自動的に調整されることを確保することです。そのため、位置合わせパラメータグループを作成する際は、使用するパラメータが特徴領域の位置を正確に変換できることを確認する必要があります。 |
- 例
-
コネクタのピンの上面データを抽出した後、データ範囲をさらに絞るために、上面データの中心点に基づいて 位置合わせパラメータグループ を作成します。その後、サーフェスの前処理 ステップで上面データをトリミングする際、1本のピンの上面データに特徴領域を設定することで、特徴領域と中心点の対応関係を確立できます。その他のピンの特徴領域も自動的に対応します。
ピンの位置が変化した場合でも、上面中心点が決まると、特徴領域は初期調整時に設定された中心点との対応関係に基づいて自動的に調整されます。
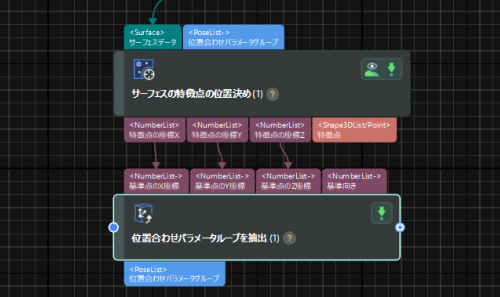
① ピンの上面データを抽出
② 上面中心点を取得
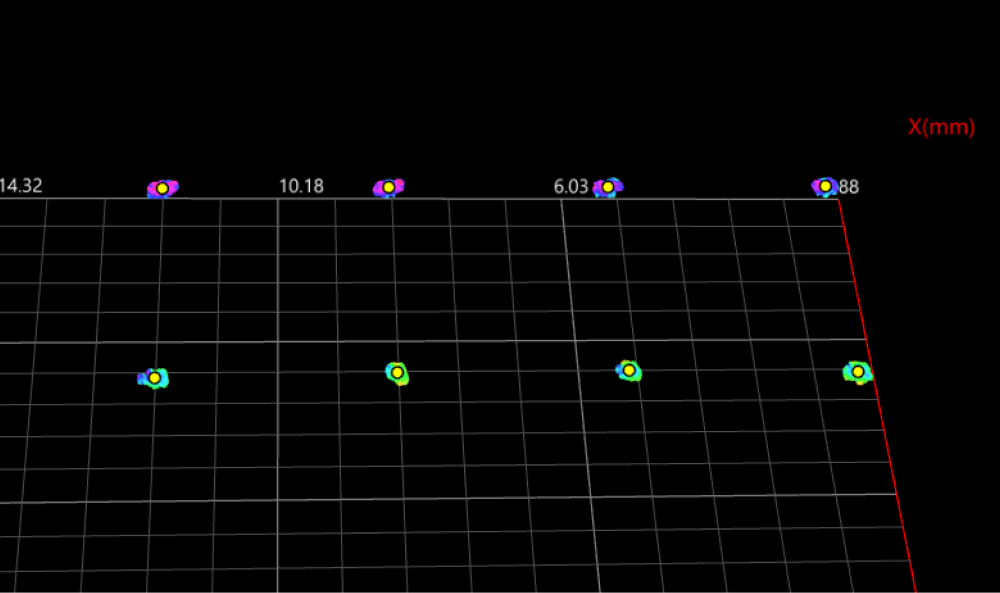
③ 位置合わせパラメータグループを作成
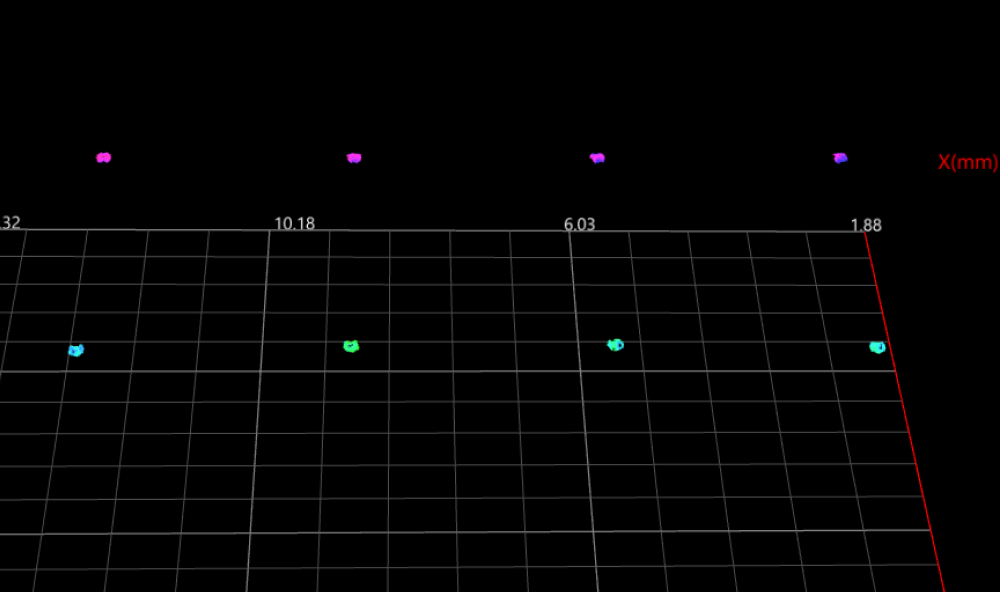
④ 特徴領域を調整
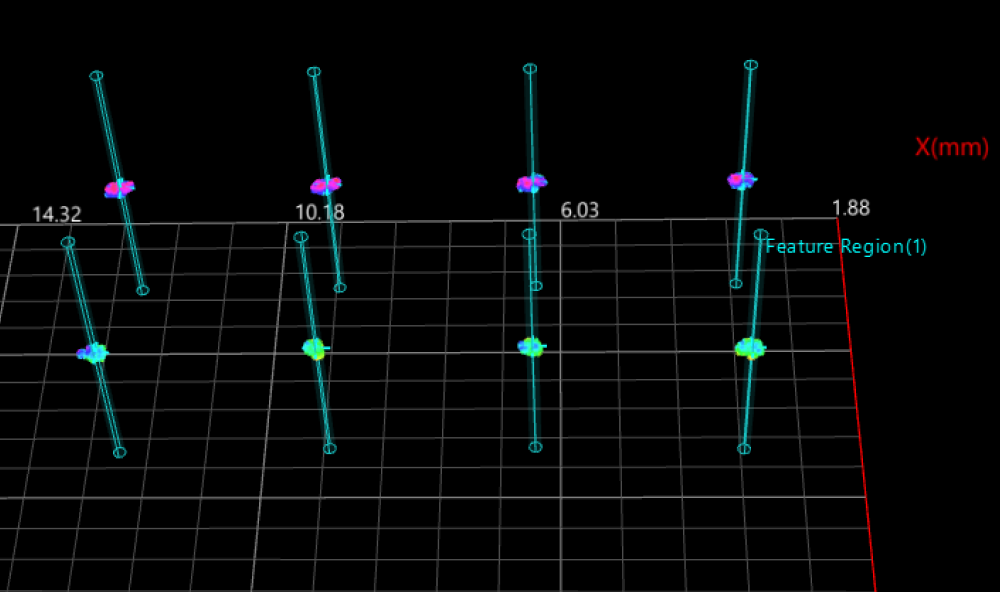
⑤ データ範囲を絞り込む
マッチング/位置合わせステップを使用
以下のステップでは、作成したマッチングテンプレートに基づいて、ワークの並進移動および回転量を計算し、位置合わせパラメータグループ として出力できます。
| ステップ | データ型 | 出力 |
|---|---|---|
サーフェスデータ |
位置合わせ後のサーフェスデータおよび位置合わせパラメータグループ。 |
|
サーフェスデータ |
マッチング結果および位置合わせパラメータグループ。 |
|
2D画像 |
位置合わせ後の画像および位置合わせパラメータグループ。 |
|
2D画像 |
マッチング結果および位置合わせパラメータグループ。 |
これらのステップで出力された位置合わせパラメータグループは、後続の特徴領域を使用するステップに入力できます。これにより、特徴領域を対応する位置まで回転または並進させることができます。
|
- 例
-
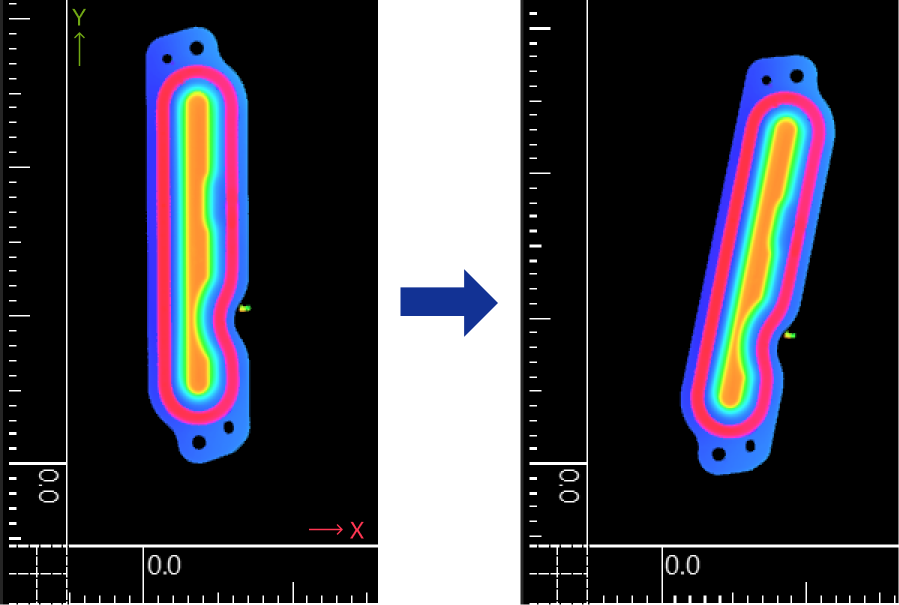
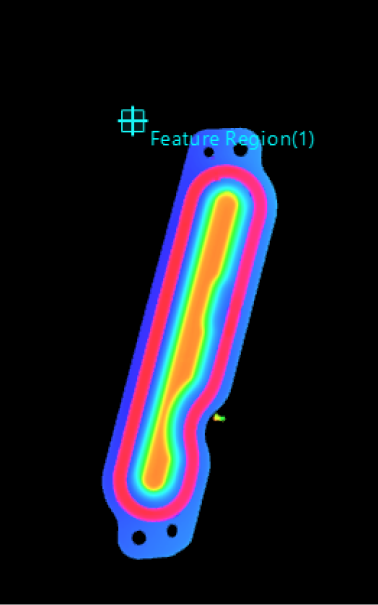
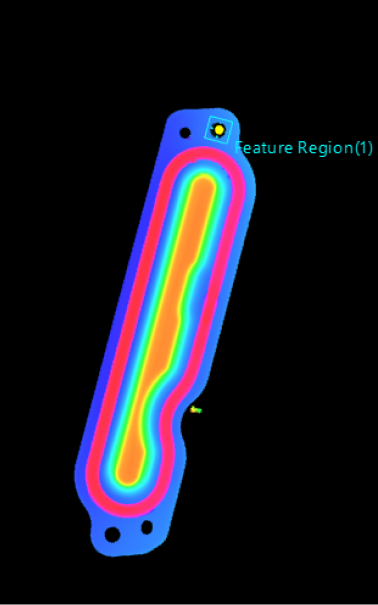
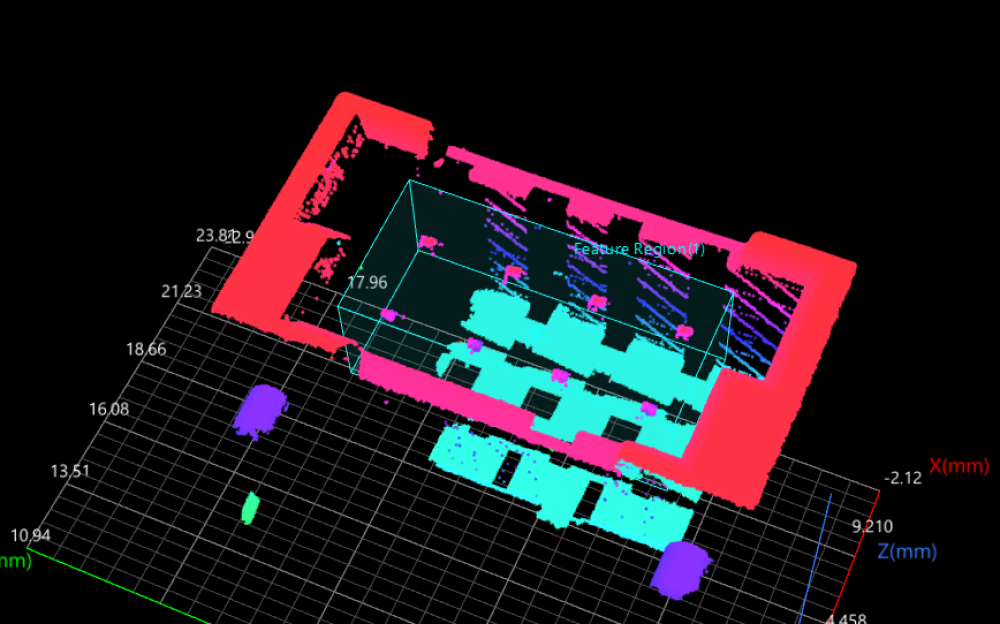
画像内のワーク位置が変化した場合でも、位置合わせパラメータグループを使用することで、特徴領域をワークに追従して移動させることができます。 ※以下の例は3Dシーンを基に説明していますが、2Dシーンでも同様の原理が適用されます。
変換タイプ 説明図 位置合わせパラメータグループの使用前 位置合わせパラメータグループの使用後 並進
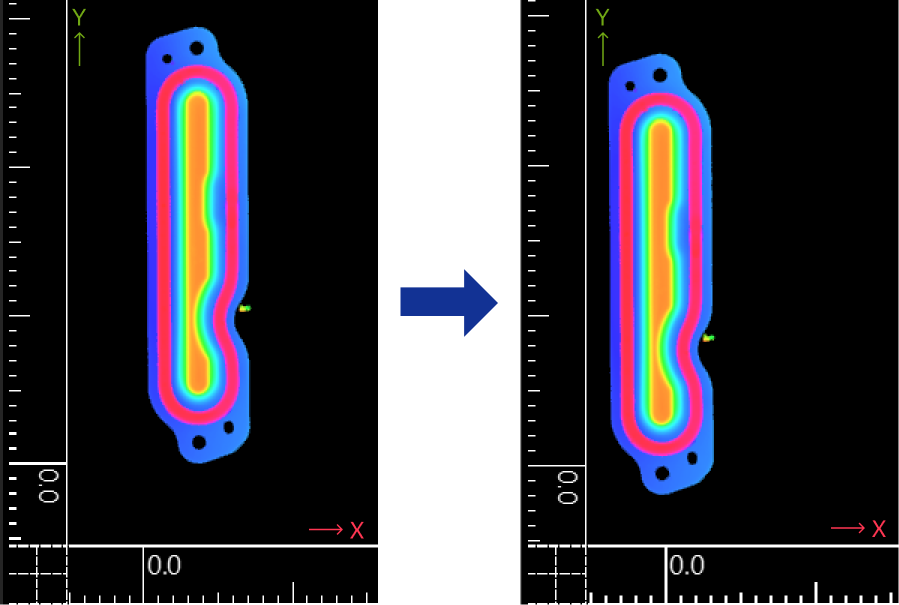
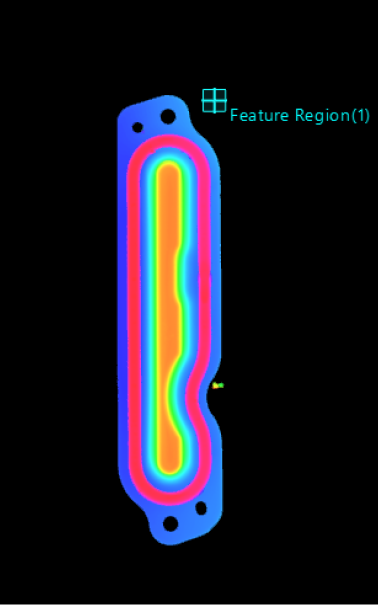
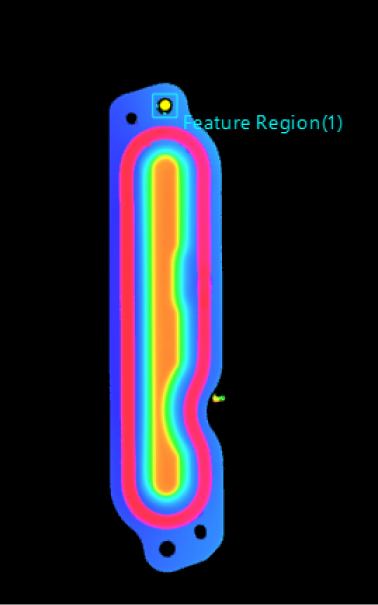
回転