N点キャリブレーション(ガントリー)
概要
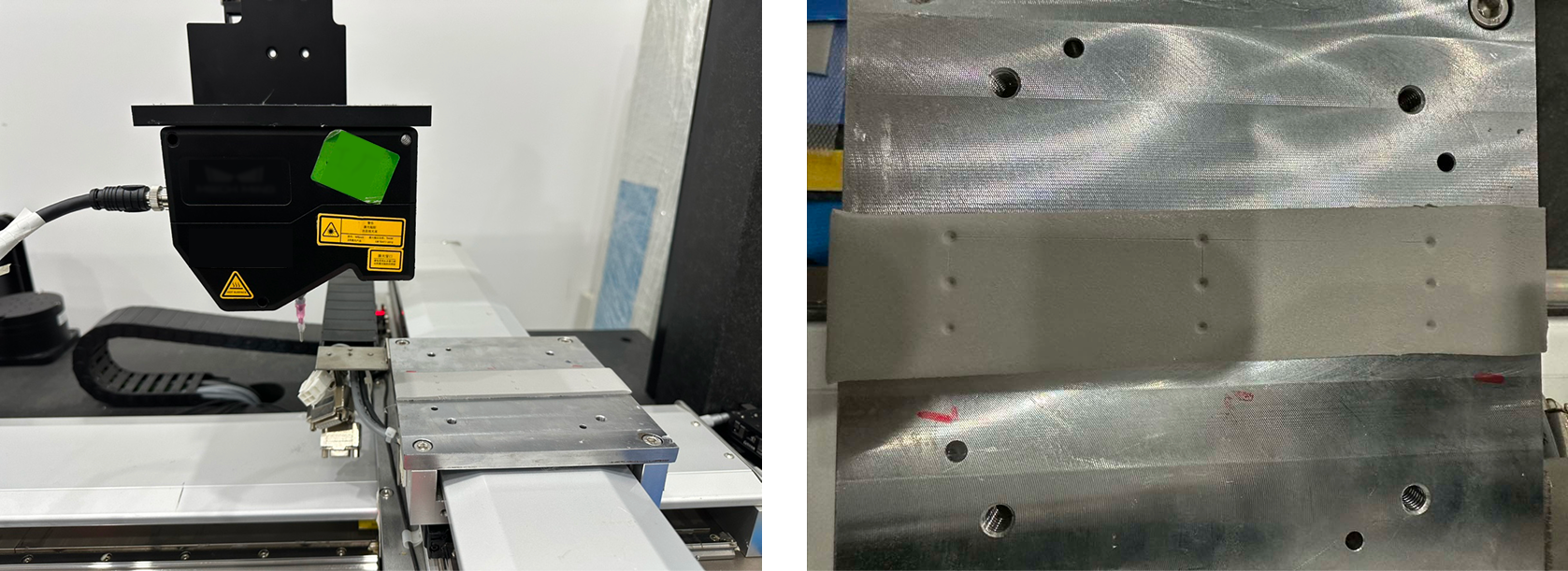
N点キャリブレーションは、Mech-MSRソフトウェアにおいて、三軸ガントリーロボットとプロファイル測定器の協調動作向けに設計された高精度キャリブレーション機能です。このプロセスの主な目的は、サーフェスデータ座標系(測定器が取得したサーフェスデータ座標系)と、装置座標系(ガントリーロボットの移動軸によって定義される座標系)との間に、正確なマッピング関係(ハンド・アイ・キャリブレーション)を構築することです。両者間の回転行列および並進ベクトルを算出することで、システムは測定されたサーフェス特徴点座標を、装置座標系へ高精度に変換できるようになります。
N点キャリブレーションは、主に高精度ディスペンス誘導システムで一般的に使用されており、ディスペンス軌跡の精度は、キャリブレーション時に構築される座標変換の精度に依存します。さらに、N点キャリブレーションは新エネルギー分野にも適用可能であり、バッテリーパック筐体溶接や電池端子レーザー溶接などの工程において、軌跡誘導用の座標基準を提供できます。
事前準備
基本条件
キャリブレーションを実施する前に、以下の基本条件を満たしていることを確認してください。
-
*治具要件:*キャリブレーション治具は、装置作業台に剛性接続されている必要があります。また、装置 X/Y/Z 軸の全ストローク移動中に、位置ずれや振動が発生しないことを確認してください。治具表面は清潔に保ち、汚れや傷がない状態である必要があります。
-
*画像品質:*測定器は、キャリブレーション領域において特徴穴を鮮明に撮像できる必要があります。特徴穴エッジは明瞭かつシャープであり、露出過度または露出不足が発生していないことを確認してください。
-
*通信接続:*装置コントローラと測定器との通信が正常であり、ポイントトリガー取得に対応していること、またデータ転送時に欠損が発生しないことを確認してください。
推奨設定
最適なキャリブレーション精度を得るため、以下の条件を満たすことを推奨します。条件を満たしていない場合でもキャリブレーションは実施可能ですが、精度にさまざまな影響が生じる可能性があります。
| 設定項目 | 推奨設定 | 精度への影響 |
|---|---|---|
装置繰返し位置決め精度 |
≤ ±5 μm(3C シーン) |
繰返し位置決め誤差は、キャリブレーション外部パラメータへ直接加算され、最終的な座標変換精度に影響します。 |
位置フィードバック |
エンコーダ閉ループフィードバック |
固定周波数駆動(エンコーダなし)ではステップ抜けのリスクがあり、機械伝達誤差を補正できないため、長時間運転後に位置ずれが発生しやすくなります。 |
特徴点取得方式 |
推奨:先端錐による穴あけ + 低反発シリコンパッド |
人為操作誤差を最小化でき、特徴穴形状が明瞭かつ安定し、再現性に優れます。 |
穴あけ操作 |
針または先端錐をパッド面に対して垂直にし、適切な深さで一度で穴あけを完了する |
過度に傾いた穴あけは孔変形を引き起こし、特徴抽出時に誤差を導入します。 |
デバイスウォームアップ |
測定器レーザー照射器を 15 分以上ウォームアップする |
コールドスタート状態では光強度が不安定となり、特徴抽出の一貫性が低下します。 |
環境条件 |
周囲温度が安定しており、明らかな振動源がないこと |
温度変動は構造熱変形を引き起こし、振動は点群データ揺れを発生させ、特徴抽出精度に影響します。 |
特徴点取得方式の比較
| 方式 | 精度 | 説明 |
|---|---|---|
先端錐 + シリコンパッド(推奨) |
高 |
先端錐を垂直に押し込み、明瞭なくぼみを形成します。操作が容易で、再現性に優れます。 |
先端同士の合わせ込み |
中~低 |
2つの先端を手動で位置合わせするため、主観的な誤差が大きく、接触力のばらつきによりランダム誤差が発生します。 |
先端と十字刻線の合わせ込み |
中 |
平面上に刻まれた十字線へ手動で位置合わせを行うため、目視読み取り誤差が発生します。また、平面高さと針先接触点の間に Z 方向の偏差が存在します。 |
| 推奨方式を採用する場合は、固定ベースを併用してシリコンパッドが平坦で位置ずれしないようにしてください。穴あけ時は先端錐を垂直に保ち、一度で押し込んで明瞭なくぼみを形成します。その後、測定器の調整ツール(Mech-Eye Viewer)でプレビュー画像を確認し、特徴が識別可能であることを確認してから、以降の操作を続行してください。 |
精度に関する注意事項
本キャリブレーション方式は、N点法に基づいてハンド・アイ・変換行列を計算するものであり、その精度は、前述したハードウェア準備および操作手順に大きく依存します。
以下のような状況が存在する場合、キャリブレーション結果に大きな偏差が生じる可能性があり、誤差範囲は数十~数百マイクロメートルに達する場合があります。
-
装置の繰返し位置決め精度が推奨要件を満たしていない場合
-
非推奨の特徴点取得方式(先端同士の合わせ込み、先端と十字刻線の合わせ込み等)を採用した場合
-
穴あけ時の傾斜が大きすぎて、特徴穴形状が変形した場合
-
キャリブレーション中に治具が移動した場合
上記の状況では、システムの実際の位置決め精度が、製品技術仕様書に記載された公称値を下回る可能性があります。
| 正式なキャリブレーションを実施する前に、再現性検証を行うことを推奨します。同一の点群に対して 2~3 回独立したキャリブレーションを実施し、各結果の差異を比較してください。もし、キャリブレーションデータ点の残差 RMS(Root Mean Square)値、または変換行列パラメータに明らかな変動が見られる場合は、本節で説明した準備作業が適切に実施されているかを優先的に確認してください。 |
キャリブレーション手順
現場条件および要求に応じて、キャリブレーション治具や対応する穴あけ・接触ツールを選択できます。以下では、シリコンパッド治具および先端錐を例として、穴あけ、データ取得、およびデータ前処理の流れを説明し、ガントリー式装置上で N 点キャリブレーションを実施する方法を紹介します。
穴あけ方式(パンチモード)を選択
キャリブレーション中、先端錐を装着したハンドにより、1回 または 複数回 の穴あけを実施できます。
| 実際の現場では、より鮮明な穴特徴を得て、反発の影響を低減するため、シリコンパッドを最大3層まで重ねることができます。先端錐を一度で複数層貫通させることで、貫通し、かつエッジが安定した特徴穴を形成できます。 |
詳細な手順は以下のようです。
-
1回穴あけ
-
複数回穴あけ
-
装置のX軸およびY軸を移動し、先端錐を目標点の真上へ移動させます。
-
装置のZ軸を下降させ、先端錐をシリコンパッドへ約 1.0 mm 押し込みます。このときの装置のTCP座標を記録してください。
-
先端錐を安全高さまで上昇させます。シリコンパッドの応力解放および穴の反発安定化を確保するため、30 秒待機後に次の データ取得 を行ってください。
-
装置のX軸およびY軸を移動し、先端錐を目標点の真上へ移動させます。
-
装置のZ軸を下降させ、先端錐をシリコンパッドへ約 1.0 mm 押し込み、現在のTCP座標を記録します。
-
先端錐を約 2.0 mm 上昇させた後、装置のX軸およびY軸を移動して次の目標点の真上へ移動し、再度穴あけおよびTCP座標記録を行います。
-
上記操作を繰り返し、すべての目標点に対する穴あけおよびTCP座標記録を完了してください。
-
先端錐を安全高さまで上昇させます。シリコンパッドの応力解放および穴の反発安定化を確保するため、30 秒待機後に次の データ取得 を行ってください。
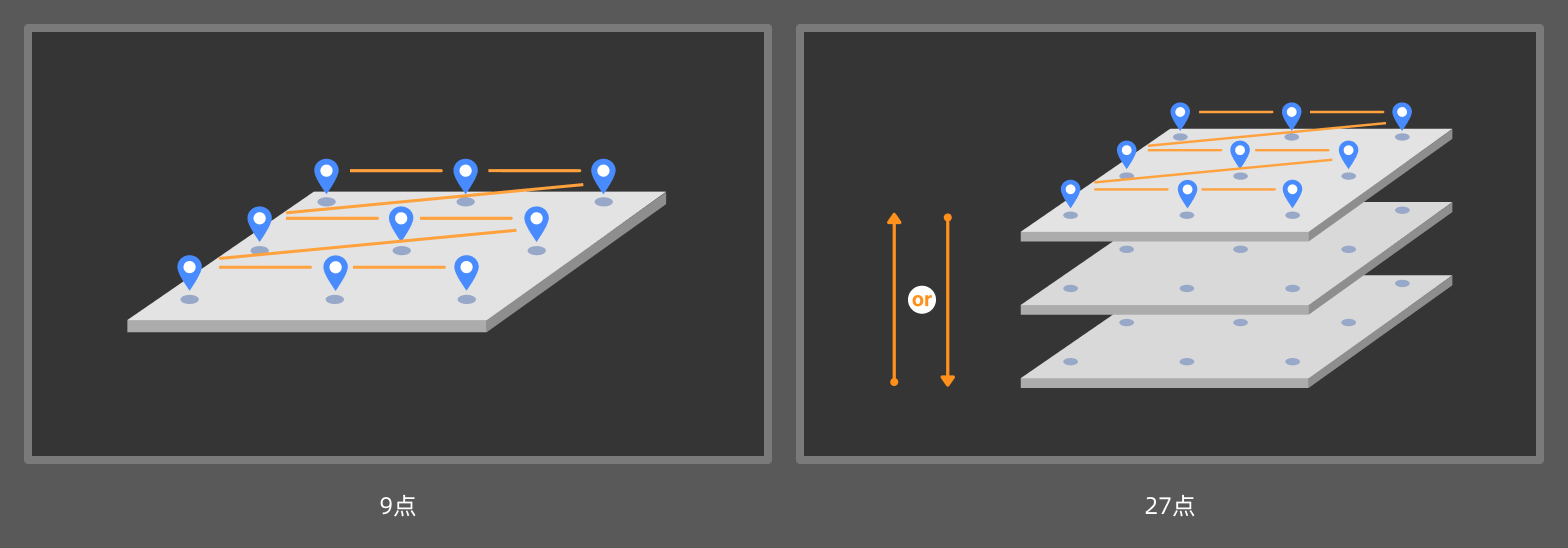
| 高精度な 9 点キャリブレーションおよび 27 点キャリブレーションを行う場合は、データ取得時に、各取得に対応する特徴点が装置座標系上で均一に分布するようにしてください。例えば、9 点キャリブレーションでは、装置座標系上で各行に 3 点ずつ配置し、各行の 3 つの特徴点を結んだ直線が、測定器のレーザー照射ラインと平行になるようにしてください。 |
データ取得
データ取得方式は、穴あけ方式(パンチモード) と厳密に一致している必要があります。これにより、完全な特徴点セットを構築できます。
-
1回:各データ取得には1つの穴のみが含まれます。複数回の取得および処理によって、複数の特徴点を取得します。
-
複数回:各データ取得および処理によって、複数の特徴点を取得できます。
以下では、取得したサーフェスデータから 9 個の特徴点を取得することを例として、データ取得方法を説明します。
-
1回穴あけ
-
複数回穴あけ
シリコンパッド上には1つの穴のみが存在するため、測定器は 9 回のデータ取得を行う必要があります。各取得時のスキャン開始位置は異なりますが、プロファイル数は一定に保つ必要があります。
| 各スキャン開始位置に対応する装置座標を記録してください。 |
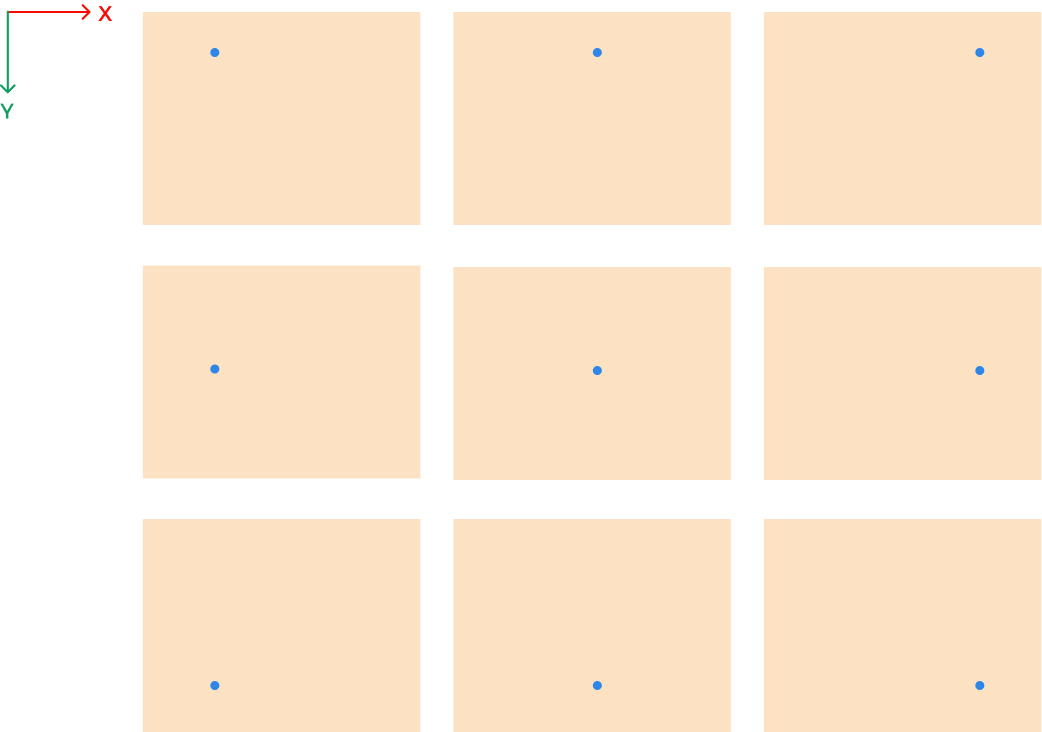
図のように、各データ取得時には、測定器のX軸またはY軸方向に沿って測定器を移動する、あるいはシリコンパッドを搭載した移動ステージを移動させる必要があります。これにより、各取得データ内における穴位置がそれぞれ異なるようにします。
| 高精度な 9 点キャリブレーションおよび 27 点キャリブレーションを行う場合は、取得時に各特徴点が装置座標系上で均一に分布するようにしてください。例えば、9 点キャリブレーションでは、装置座標系上で各行に 3 点ずつ配置し、各行の 3 つの特徴点を結んだ直線が、測定器のレーザー照射ラインと平行になるようにしてください。 |
シリコンパッド上には既に 9 個の穴が存在するため、測定器は 1 回のみデータ取得を行えばよいです。
| 測定器のスキャン開始位置に対応する装置座標を記録してください。 |
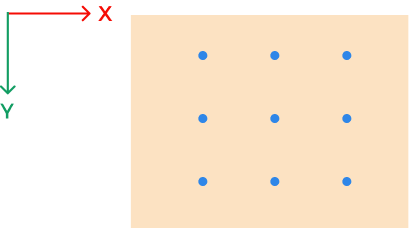
図のように、データ取得時には、測定器の視野内に 9 個すべての穴が収まるようにしてください。
データ前処理
-
1回穴あけ
-
複数回穴あけ
-
インラインプロファイル測定器 ステップのパラメータ設定エリアで、傾き補正 を実施するかどうかを確認してください。
高精度が要求される場合は、測定器に対して 傾斜キャリブレーション を実施し、センサーヘッド取付傾斜によるデータ歪みや測定誤差を除去することを推奨します。 -
サーフェスデータを前処理します。例えば、サーフェスの前処理 ステップの ガウシアンフィルター を使用して画像全体を処理することで、穴エッジ特徴を保持しながら表面ノイズを平滑化し、後続の特徴点抽出の安定性を確保できます。
-
特徴穴から特徴点を抽出します。例えば、サーフェスの特徴点の位置決め ステップでは、特徴点タイプを 最小Z値 に設定して、特徴点を取得できます。
-
複数回取得したサーフェスデータを順番に処理し、特徴点リストを生成します。
-
特徴点リストを N点キャリブレーション(3D)ステップへ入力し、キャリブレーションを開始します。
-
インラインプロファイル測定器 ステップのパラメータ設定エリアで、傾き補正 を実施するかどうかを確認してください。
高精度が要求される場合は、測定器に対して 傾斜キャリブレーション を実施し、センサーヘッド取付傾斜によるデータ歪みや測定誤差を除去することを推奨します。 -
サーフェスデータを前処理します。例えば、サーフェスの前処理 ステップの ガウシアンフィルター を使用して画像全体を処理することで、穴エッジ特徴を保持しながら表面ノイズを平滑化し、後続の特徴点抽出の安定性を確保できます。
-
特徴穴から特徴点を抽出します。例えば、サーフェスの特徴点の位置決め ステップでは、特徴点タイプを 最小Z値 に設定して、特徴点リストを取得できます。
-
特徴点リストを N点キャリブレーション(3D)ステップへ入力し、キャリブレーションを開始します。
キャリブレーションを計算
N点キャリブレーション(3D)ステップのパラメータ設定エリアで エディタを開く をクリックし、N点キャリブレーションウィンドウを開きます。
| N点キャリブレーション(3D)ステップでは、特徴点リストの入力が必要です。特徴点リストが入力されていない場合、N点キャリブレーションウィンドウを開くことはできません。 |
 キャリブレーションタスクを新規作成
キャリブレーションタスクを新規作成
キャリブレーションタスクを新規作成 をクリックすると、タスクを作成できます。
各タスクには、以下のキャリブレーション状態が表示されます。
-
未完了:現在キャリブレーションが完了していない状態です。ウィンドウ右側で キャリブレーション設定 を行い、キャリブレーション計算後に結果を 適用 することで、キャリブレーションを完了できます。
-
完了済み:現在キャリブレーションが完了している状態です。
-
変更済み:完了済みのキャリブレーションタスクに対して設定変更が行われた状態です。再度 キャリブレーション計算 を実行して結果を 適用 するか、前回の適用状態に復元 を選択すると、状態は 完了済み に戻ります。
 キャリブレーション設定を完了
キャリブレーション設定を完了
まず、パンチモード、すなわちハンドによる穴あけ方式(1回 または 複数回)を選択し、その後その他のパラメータを設定します。
-
1回穴あけ
-
複数回穴あけ
各データ取得には1つの穴のみが含まれます。複数回の取得および処理によって、複数の特徴点を取得します。
| パラメータ | 説明 |
|---|---|
高精度モード |
9 点または 27 点キャリブレーション時のみ有効化可能で、システム誤差補正に使用されます。
|
TCP座標 |
ハンドによる穴あけ時に記録された TCP(ツールセンターポイント)位置です。 |
軸方向マッピング |
軸方向マッピング設定は、装置座標系と測定器が取得したサーフェスデータ座標系との正確な対応関係を構築するための設定です。 設定手順は以下の通りです。
|
ポイントペア設定 |
特徴点と取得開始位置(装置座標系)との座標対応関係を構築するために使用されます。
|
各データ取得および処理によって、複数の特徴点を取得できます。
| パラメータ | 説明 |
|---|---|
高精度モード |
9 点または 27 点キャリブレーション時のみ有効化可能で、システム誤差補正に使用されます。
|
取得開始位置 |
装置座標系における、初回データ取得時の開始位置です。 |
軸方向マッピング |
軸方向マッピング設定は、装置座標系と測定器が取得したサーフェスデータ座標系との正確な対応関係を構築するための設定です。 設定手順は以下の通りです。
|
ポイントペア設定 |
特徴点とツールセンターポイント(TCP)との座標対応関係を構築するために使用されます。
|
パラメータ設定完了後、キャリブレーションを計算 をクリックすると、キャリブレーション結果が生成されます。
キャリブレーション結果を適用
N点キャリブレーションの結果は、プロジェクトフォルダ内の calibration フォルダに保存されます。この結果は、現在のソリューション内の任意のプロジェクトにある インラインプロファイル測定器 ステップで使用できます。
使用手順は以下の通りです。
-
ステップの パラメータ設定エリア で、カメラモード を 単台 に変更します。
-
N点キャリブレーションを適用 パラメータにチェックを入れます。パラメータエリアに キャリブレーション結果を選択 パラメータが表示されるので、ドロップダウンリストから使用するキャリブレーション結果を選択してください。
-
取得開始位置 X/Y/Z 座標 を設定してください。これは、測定器がデータ取得を開始する際の開始位置に対応する、装置座標系下の X・Y・Z 座標です。
-
当該ステップのその他のパラメータ設定を完了後、ステップを実行 すると、選択したキャリブレーション結果が適用されます。
プロジェクトでN点キャリブレーション結果を適用し、サーフェスデータから特徴点を取得した後、特徴点の位置姿勢を変換(ガントリー)ステップを使用することで、特徴点座標を装置座標系へ変換できます。これにより、装置の後続軌跡計画および動作実行を行うことができます。