傾斜キャリブレーション(自動)
概要
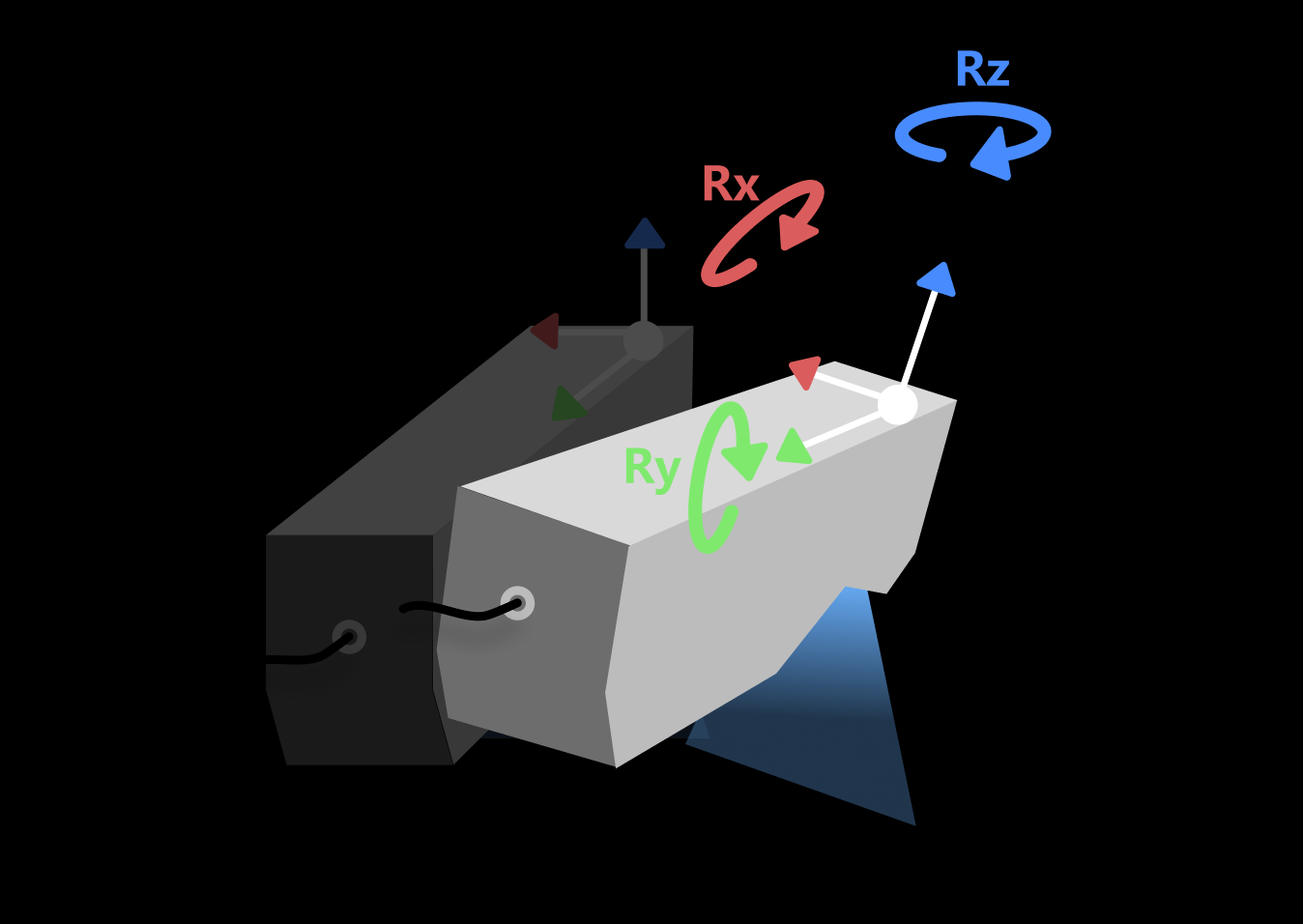
傾斜キャリブレーション(自動)は、標準キャリブレーションブロックをスキャンすることで、システムがセンサーヘッドの実際の取り付け傾斜角度(方向ベクトル)を自動計算するキャリブレーション方法です。この方法では、キャリブレーションブロックの既知の幾何学的特徴を利用し、2回のスキャンデータ間の空間関係を解析することで、センサーヘッドのX・Y・Z軸周りの取り付け傾斜角度を算出し、後続測定におけるリアルタイム傾斜補正用のキャリブレーションパラメータを生成します。
自動キャリブレーションは手動で角度を測定する必要がなく、高精度かつ再現性に優れているため、高精度が要求され、環境制御が可能な実験室や生産ラインのシーンに適しています。
| 測定器のキャリブレーション機能は、ソリューションを開いた後に使用可能となり、キャリブレーション結果はそのソリューション内のすべてのプロジェクトに適用されます。 |
機能使用
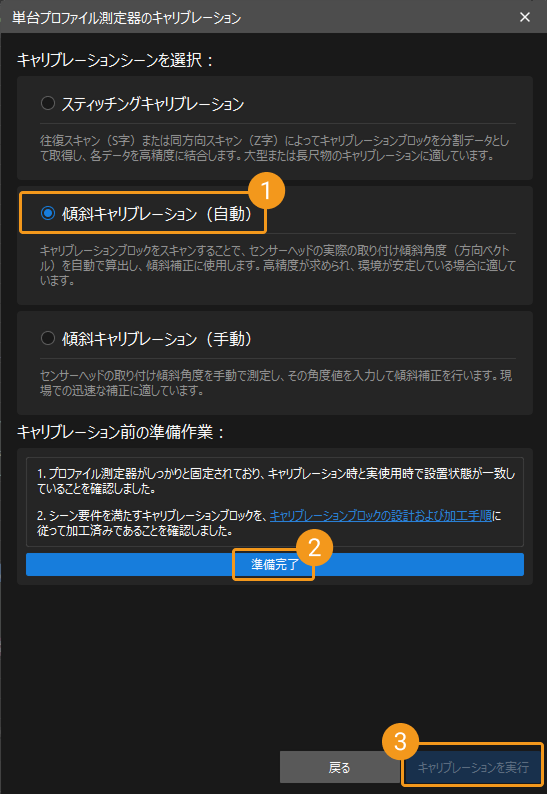
以下のいずれかの方法で、傾斜キャリブレーション(自動)ウィンドウを開くことができます。
-
Mech-MSRのメイン画面で、ツールバー の プロファイル測定器キャリブレーション をクリックして、プロファイル測定器のキャリブレーションウィンドウを開きます。単台 を選択すると、単台プロファイル測定器のキャリブレーションウィンドウに入り、傾斜キャリブレーション(自動)を選択できます。
-
メニューバーで を選択し、プロファイル測定器のキャリブレーションウィンドウを開きます。単台 を選択すると、単台プロファイル測定器のキャリブレーションウィンドウに入り、傾斜キャリブレーション(自動)を選択できます。
キャリブレーションの実行手順
事前準備
キャリブレーションを実行する前に、以下の準備が完了していることを確認してください。
-
測定器が確実に固定されており、キャリブレーション時と実際の使用時で設置状態が一致していることを確認してください。
-
キャリブレーションブロックの設計と加工 に従って、現在の使用シーンに適したキャリブレーションブロックが加工済みであり、かつ 配置要件を満たしている ことを確認してください。
-
Mech-Eye ViewerおよびMech-MSRが、測定器に正常に接続できることを確認してください。
-
Mech-Eye Viewerで パラメータを調整 し、取得した画像データに明らかな欠損がなく、ノイズが少ないことを確認してください。さらに、そのパラメータ設定を、キャリブレーション時に使用する測定器の設定パラメータグループとして保存してください。
-
キャリブレーション精度を確保するため、キャリブレーション前に測定器を暖機運転する必要があります。実際の使用環境に合わせ、デバイスの電源を入れた後、1時間以上 連続してデータを取得してください。
操作手順
 プロファイル測定器に接続
プロファイル測定器に接続
プロファイル測定器リスト からデバイスを選択し、接続を完了してください。

|
接続後、次へ をクリックしてキャリブレーションブロック設定画面に進みます。
 キャリブレーションブロックを設定
キャリブレーションブロックを設定
準備したキャリブレーションブロックの種類に応じて、必要な幾何パラメータを入力してください。
-
キャリブレーションブロックの種類を確認します。
-
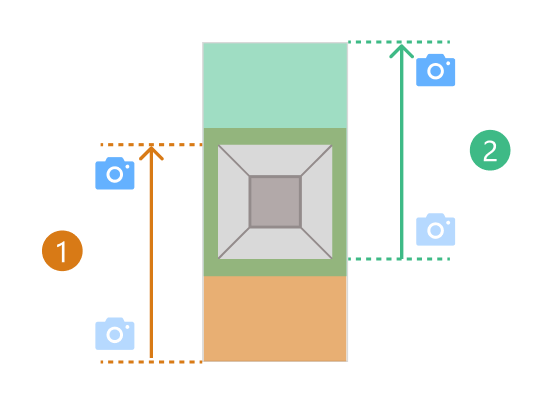
キャリブレーションブロック(1錐台)
測定器は、異なる2つの開始位置から、キャリブレーションブロック上の 同一の錐台 をスキャンする必要があります。各回で取得するデータには、対応する錐台の完全な表面およびその錐台が存在する基準面が含まれている必要があります。2回のスキャン位置は、下図の①および②に示しています。
-
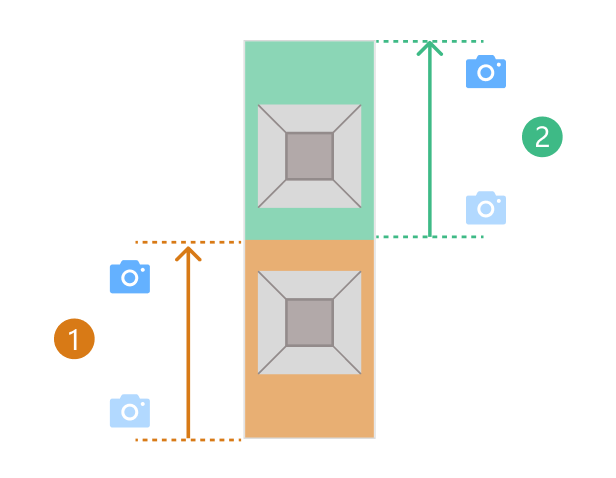
キャリブレーションブロック(2錐台)
測定器は、キャリブレーションブロック上の 2つの異なる錐台 をそれぞれスキャンする必要があります。各回で取得するデータには、対応する錐台の完全な表面およびその錐台が存在する基準面が含まれている必要があります。2回のスキャン位置は、下図の①および②に示しています。
-
-
キャリブレーションブロックのパラメータを設定します。
実際に使用するキャリブレーションブロックに基づいて、パラメータ値を入力してください。
正確なパラメータ値を必ず入力してください。 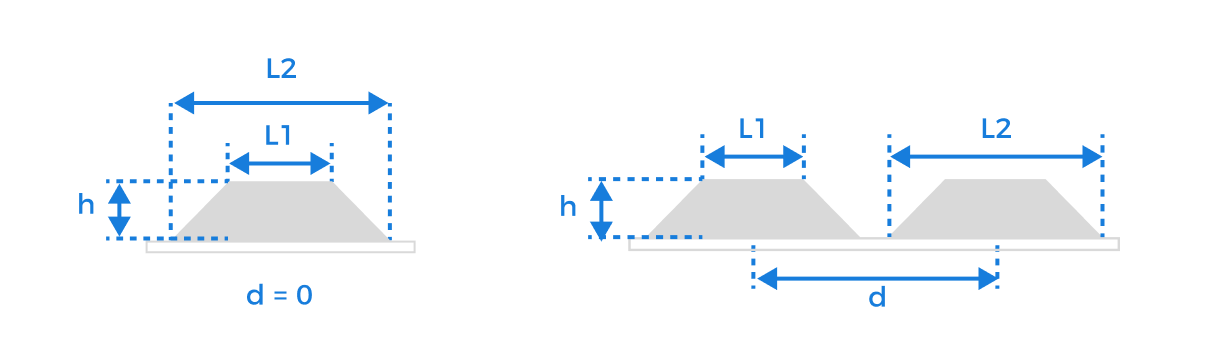
パラメータ
説明
上面辺長(L1)
錐台の短い底辺の辺長です。単位はミリメートル(mm)です。
底面辺長(L2)
錐台の長い底辺の辺長です。単位はミリメートル(mm)です。
錐台の高さ(h)
錐台の上面から下面までの垂直距離です。単位はミリメートル(mm)です。
並進距離(d)
隣接する錐台の中心線間の距離です。単位はミリメートル(mm)です。
キャリブレーションブロックに複数の錐台が並んでいる場合、この距離だけ並進させることで互いに重なります。
パラメータ値を入力して確認した後、次へ をクリックしてキャリブレーション画面に進みます。
 キャリブレーションを計算
キャリブレーションを計算
キャリブレーション手順は以下の通りです。
-
キャリブレーションブロックと測定器の相対移動方向を設定し、後続のデータ取得で使用する設定パラメータグループを指定します。
実際の移動関係に基づき、キャリブレーションブロックの移動方向と測定器のY軸方向が 同一 か 逆方向 かを選択してください。この設定は、座標系マッピングを正しく行うために使用されます。
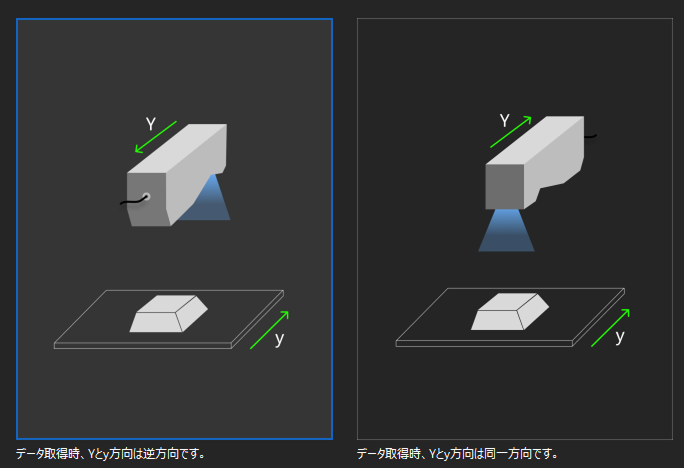
設定完了後、次へ をクリックして、データ取得を開始します。
-
データ取得を行います。
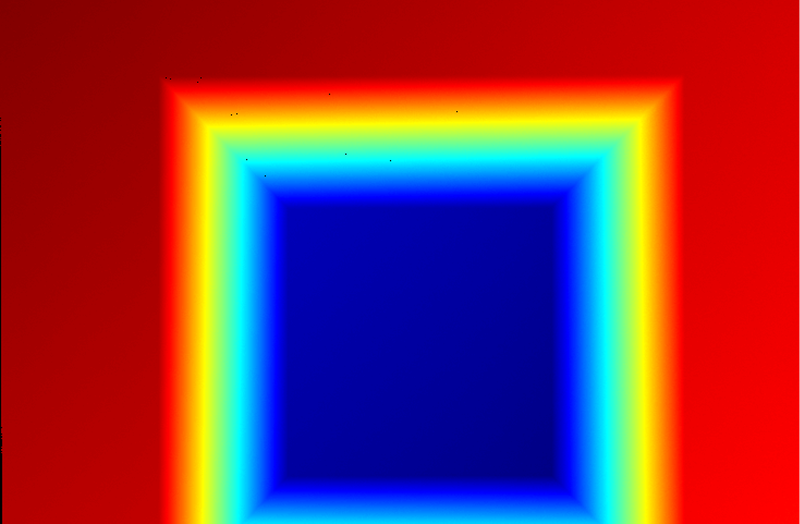
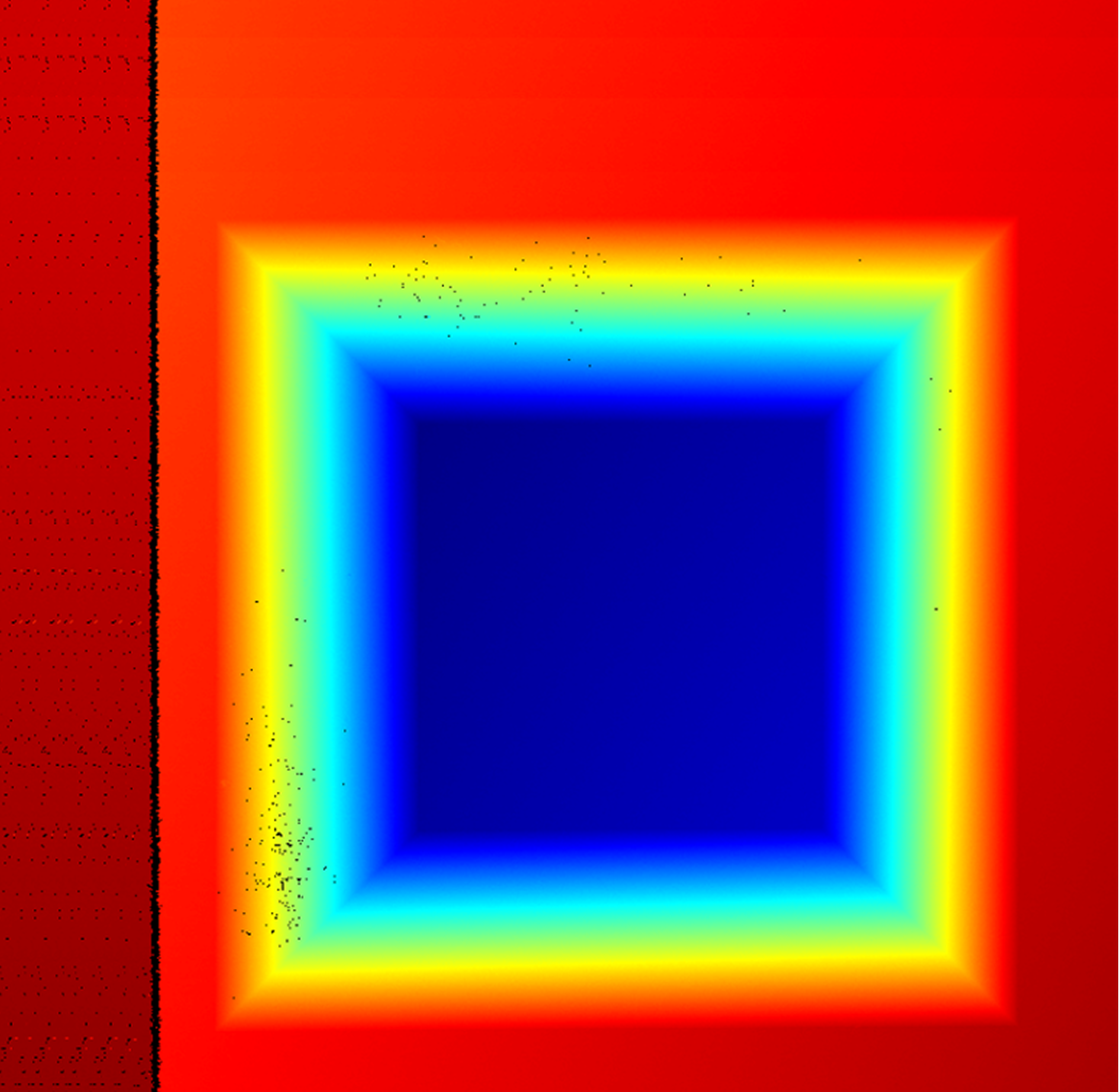
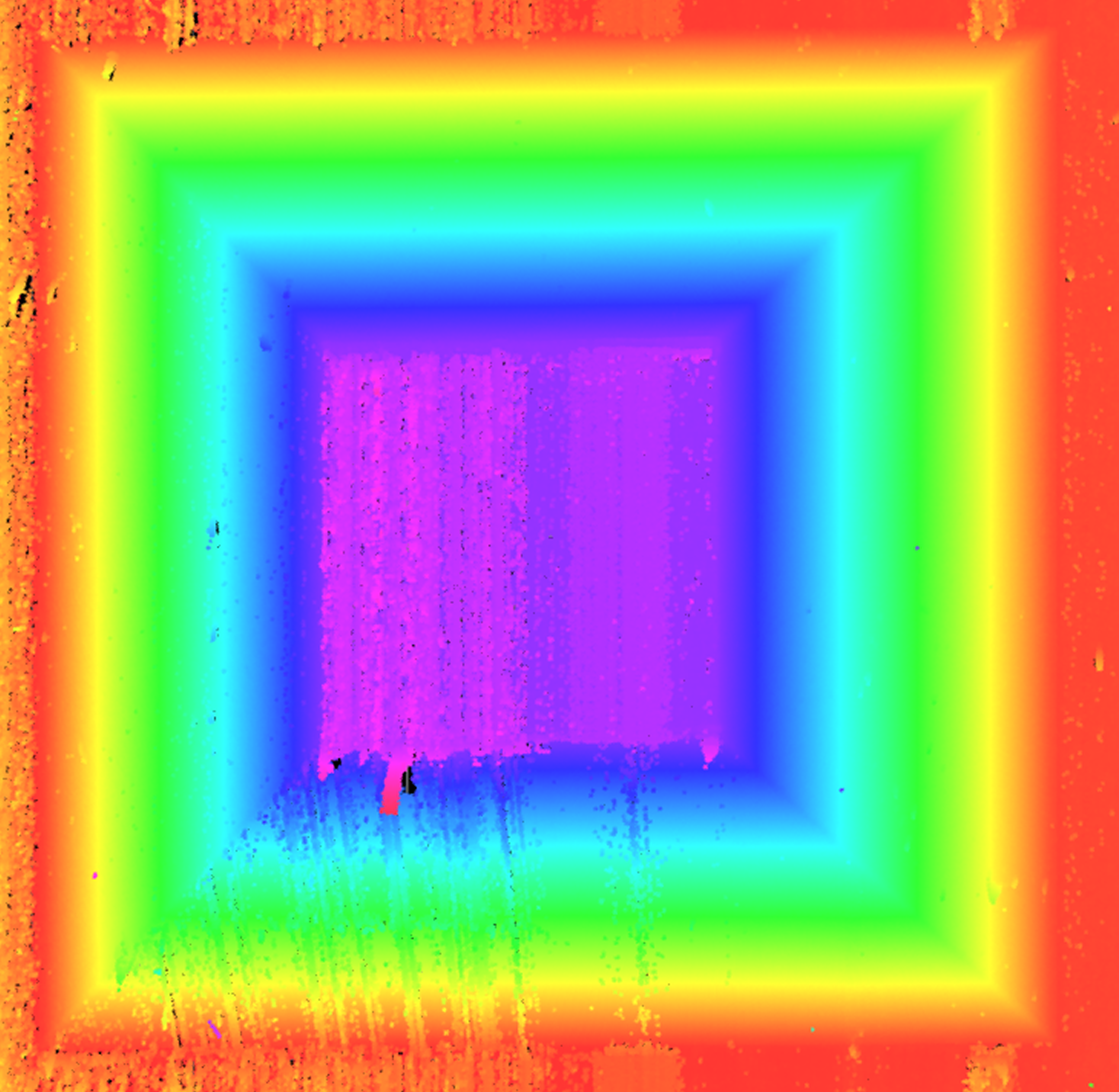
使用するキャリブレーションブロックの種類に応じて、2回の取得開始位置を決定した後、取得を開始 をクリックし、順番にデータ取得を実施してください。各データ取得後、画像データが以下の要件を満たしているか確認してください。
-
キャリブレーションブロックが画像の中央に位置していること。
-
画像にはキャリブレーションブロックの6つの特徴面のみが含まれ、各面が完全に撮影されていること。
他のサーフェスデータが存在する場合は、特徴領域を使用 をオンにし、特徴領域のサイズと位置を調整して、特徴領域内にキャリブレーションブロックの6つの特徴面のみが含まれるようにしてください。 -
ノイズが少ないこと。
正常 点が欠損 一部の表面が不完全 余分な表面がある ノイズが多い 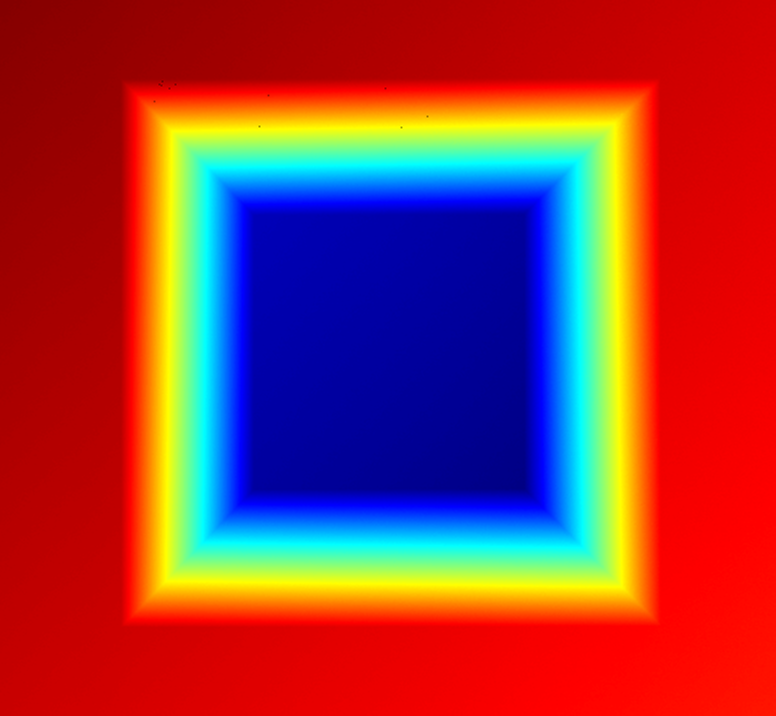
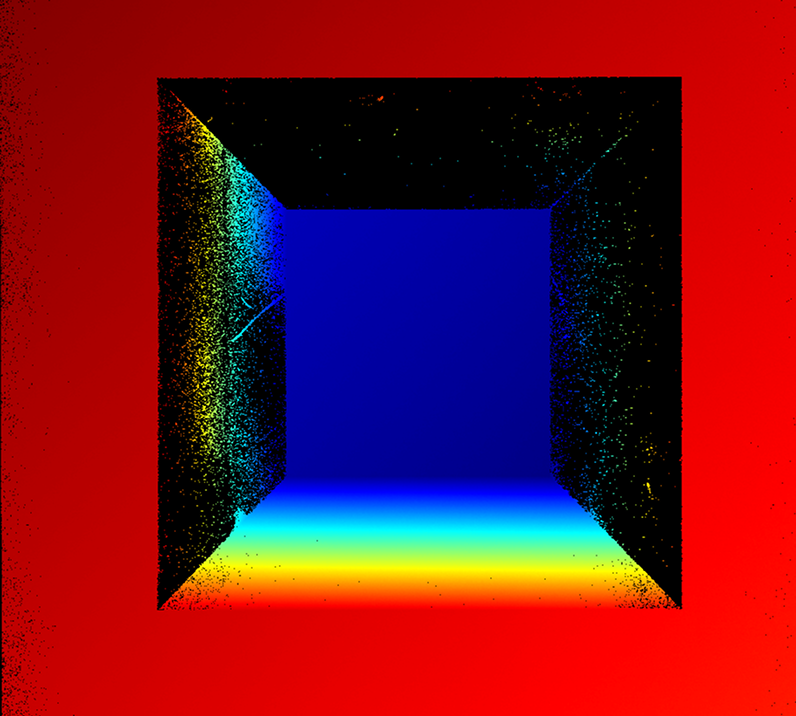
取得したデータ品質が基準を満たさない場合は、Mech-Eye Viewerでパラメータを再調整し、画像品質が要件を満たすまで調整してください。その後、パラメータグループを保存し、手順1に戻って 設定パラメータグループ を再選択してください。
データ取得完了後、次へ をクリックしてキャリブレーション計算を開始します。
-
-
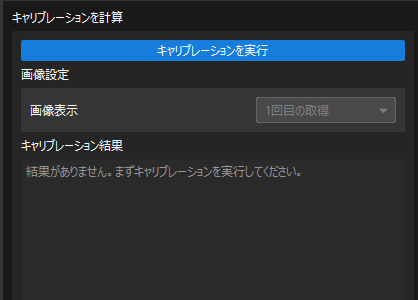
キャリブレーション計算を行います。
キャリブレーションを実行 をクリックして、キャリブレーションを開始します。システムは2回のスキャンデータ間の幾何関係を自動解析し、センサーヘッドの実際の取付傾斜角度(方向ベクトル)を算出し、キャリブレーション結果を生成します。
-
キャリブレーション結果を確認し、キャリブレーション精度が要件を満たしていることを確認します。
問題がなければ、保存 をクリックし、ポップアップウィンドウで名前と保存先を設定してキャリブレーション結果を保存します。これでキャリブレーションは完了です。
キャリブレーション結果を適用
傾斜キャリブレーション(自動)の結果は、プロジェクトフォルダ内の calibration フォルダに保存されます。この結果は、現在のソリューション内の任意のプロジェクトにある インラインプロファイル測定器 ステップで使用できます。
使用手順は以下の通りです。
-
ステップの パラメータ設定エリア で、カメラモード を 単台 に変更します。
-
傾き補正 パラメータにチェックを入れます。パラメータエリアに キャリブレーション結果を選択 パラメータが表示されるので、ドロップダウンリストから使用するキャリブレーション結果を選択してください。
-
当該ステップのその他のパラメータ設定を完了後、ステップを実行 すると、選択したキャリブレーション結果が適用されます。