歪み補正キャリブレーション
機能
歪み補正キャリブレーションとは、2Dカメラのレンズ撮影過程で発生する幾何学的歪みを補正するためのプロセスを指します。レンズの光学特性や取り付け誤差の影響により、取得された画像には通常、さまざまな程度の歪みが生じます。その結果、本来は直線である対象が画像内では曲線として表示されたり、対象位置と実際の位置との間にずれが発生したりします。
歪み補正キャリブレーションを行うことで、カメラの歪みパラメータを算出し、それらのパラメータに基づいて画像補正を実施できます。これにより、歪みの影響を除去または低減し、画像内の幾何学的関係を実際の状況により近づけることが可能になります。また、歪み補正キャリブレーションは、その後の位置決め、測定、およびハンド・アイ・キャリブレーションに対して、より正確な画像データ基盤を提供します。
事前準備
以下は、歪み補正キャリブレーションを実行する前に必要な事前準備です。
キャリブレーションに必要なものを準備
歪み補正キャリブレーションを実行するには、キャリブレーションボードの使用が必要です。キャリブレーションボード上の特徴がはっきりと見えること、破損や曲げ変形がないことを確認してください。
キャリブレーションボードの画像品質を確認
| キャリブレーションボードの画像品質は、歪み補正キャリブレーション結果の精度に影響を与えます。そのため、キャリブレーションボードの画像品質を確認する必要があります。キャリブレーションフローには、キャリブレーションボード画像品質を確認する操作が含まれていますが、キャリブレーション前にあらかじめ画像品質を確認しておくことで、キャリブレーション作業全体の所要時間を短縮できます。 |
-
キャリブレーションボードをカメラ視野内の作業平面の中央に水平に配置します。
-
2Dカメラ管理ツール でカメラを接続し、カメラパラメータを調整してください。2D画像内のキャリブレーションボード全体の明るさが暗すぎないようにし、各キャリブレーション円がはっきり見えることを確認してください。
現場の環境光が複雑な場合、2D画像への影響を軽減するために、遮光・補光することを推奨します。
正常 露出過度 露出不足 


キャリブレーションを開始
歪み補正キャリブレーションは、下図のようなフローで行います。

-
カメラに接続:カメラを接続し、キャリブレーションに使用する画像データを取得します。
-
キャリブレーションボードを選択:キャリブレーションボードの種類を選択し、特徴点検出のためのパラメータを設定します。
-
歪みパラメータを計算:キャリブレーションボードの特徴点に基づき、カメラの歪みパラメータを計算します。
以下は、上記フローの詳細な説明です。
カメラに接続
-
使用するカメラを接続します。
カメラに接続 手順では、ドロップダウンリストから接続済みのカメラを選択できます。
リストに選択可能なカメラが表示されない場合は、2Dカメラ管理 をクリックし、2Dカメラ管理ツール でカメラ接続を完了した後、再度ここに戻って対象のカメラを選択してください。
-
カメラで正常に画像を取得できることを確認します。
カメラ接続後、連続キャプチャ または 一回キャプチャ をクリックすると、右側の 画像ビュー で取得した画像を確認できます。
画像取得時は、撮影されたキャリブレーションボード全体の明るさが暗すぎたり明るすぎたりせず、また明るさにムラがないこと、さらに各キャリブレーション円がはっきりと見えることを確認してください。画像品質が基準を満たしていない場合は、露出時間 および ゲイン を調整して、画像品質を改善してください。
カメラ接続後、画像品質に問題がないことを確認したら、下部の 次へ をクリックしてください。
キャリブレーションボードを選択
-
キャリブレーションボードの型番を選択します。
-
標準キャリブレーションボードを使用する場合は、標準キャリブレーションボード型番を使用 を選択します。
-
その他のキャリブレーションボードを使用する場合は、キャリブレーションボードのタイプ を選択し、特徴点間隔 を設定する必要があります。
-
-
キャリブレーションボードの位置および画像品質を確認します。
連続キャプチャ をクリックすると、右側の 画像ビュー でキャリブレーションボードの位置(対象物の位置に配置する必要があります)とキャリブレーションボード画像の品質を確認できます。これにより、キャリブレーション結果の精度と信頼性を確保できます。
キャリブレーションボードを選択し、キャリブレーションボードの位置および画像品質に問題がないことを確認した後、下の 次へ をクリックしてください。
歪みパラメータを計算
-
歪みタイプを選択します。
補正が必要な歪みタイプを選択します。レンズ歪みと透視歪み、レンズ歪み、透視歪み をサポートしています。
-
レンズ歪み:カメラレンズの光学特性によって生じる画像の変形で、直線が曲線として表示されることがあります(樽型歪みや糸巻き型歪みなど)。
-
透視歪み:カメラと対象物との傾きや距離によって生じる比例的な歪みで、近い物体は大きく、遠い物体は小さく見えることがあります。
-
-
歪みパラメータを計算します。
歪みパラメータを計算 をクリックして、歪みパラメータを計算します。
-
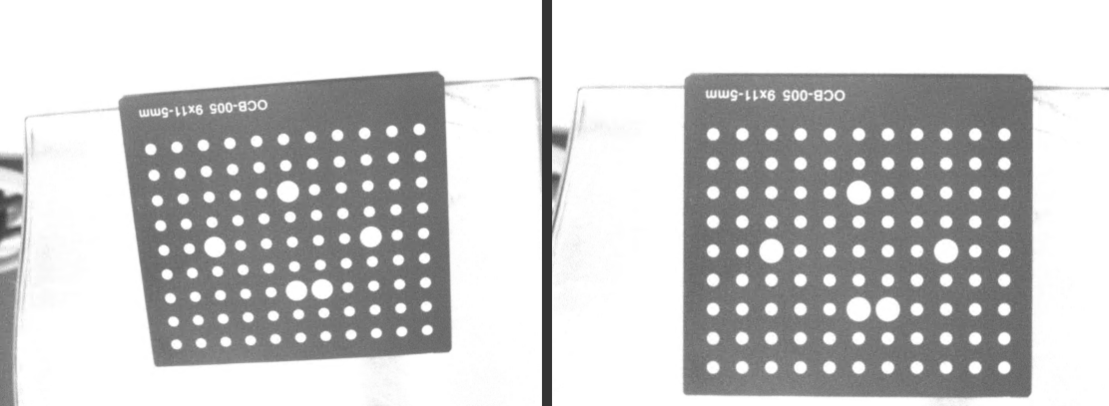
歪み補正結果をプレビューします。
画像を取得 をクリックすると、右側の 画像ビュー で歪み補正後の画像を確認できます。
下図のように、左側が元画像、右側が歪み補正後の画像です。
-
歪み補正キャリブレーション結果を保存します。
保存 をクリックすると、キャリブレーション結果をソリューションの「calibration」フォルダに保存できます。歪みキャリブレーション結果は、2Dカメラ ステップで使用できます。
これで歪みキャリブレーションが完了しました。