YASKAWA Basic Operation
This topic introduces some basic operations of Kawasaki robots.
Set Tool at the Vision Point
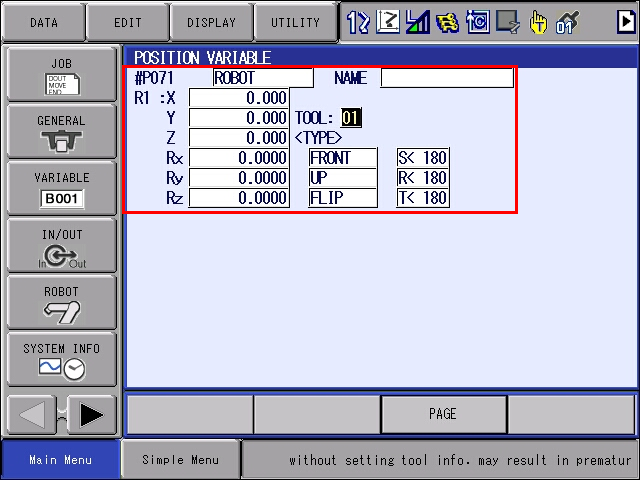
In this example, Tool No.1 is set for P071 Position Register.
| The pose data of Tool 0 must be all 0. Namely, Tool 0 has a flange pose. Do not change the pose data of Tool 0. |
-
In the teach mode, select a program and click .
-
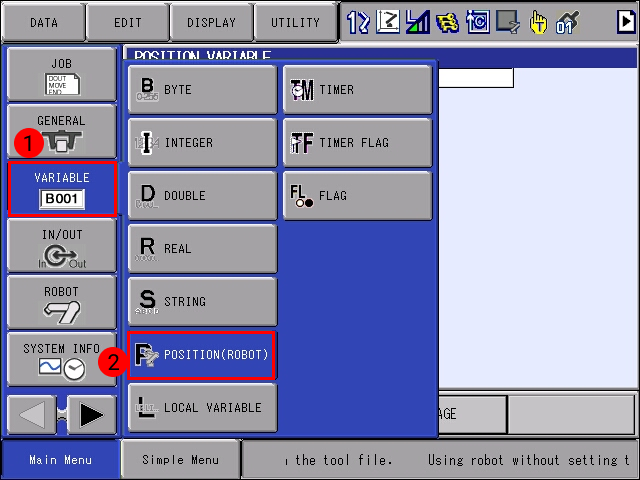
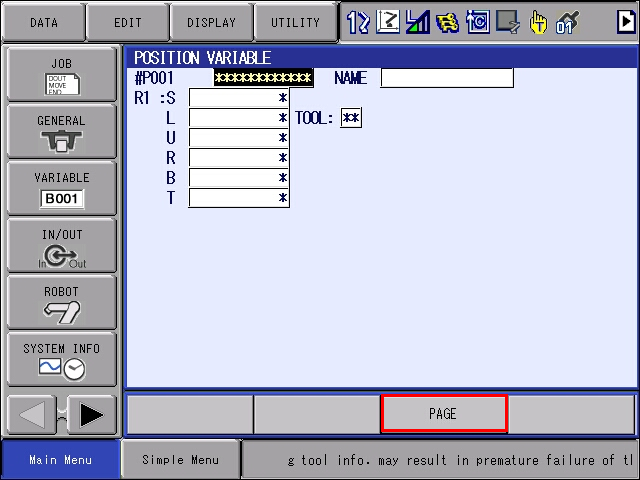
In the POSITION VARIABLE interface, click PAGE.
-
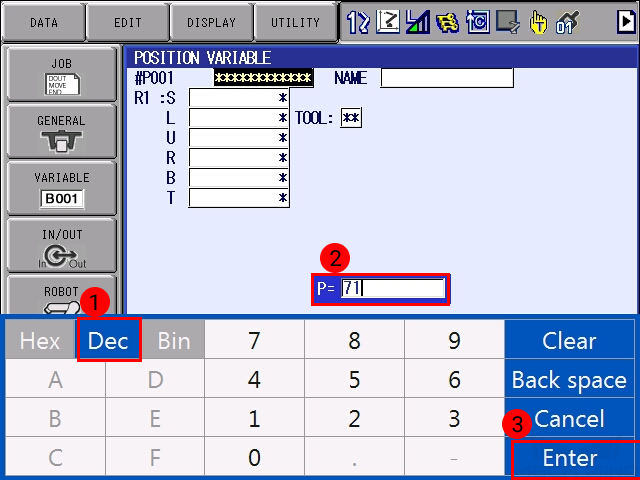
On the pop-up keyboard, select Dec, input 71 (indicating P071 Position Register), and click Enter.
-
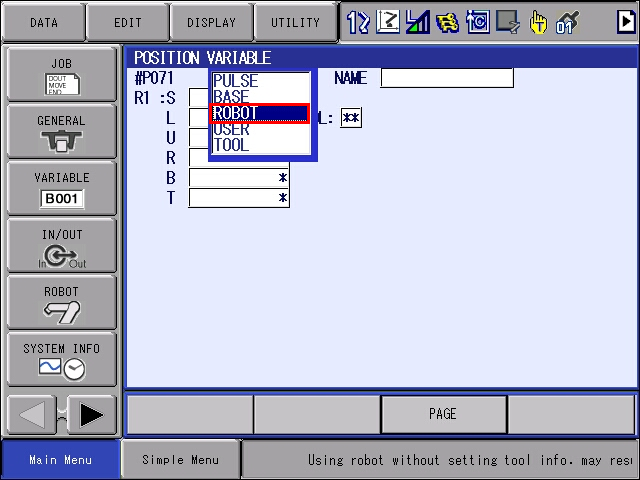
Click the blank box next to “#P071” to choose the reference frame. Select ROBOT in the drop-down menu.
-
Click TOOL. Input 1 (indicating using tool No.1) with the pop-up keyboard. Click Enter.
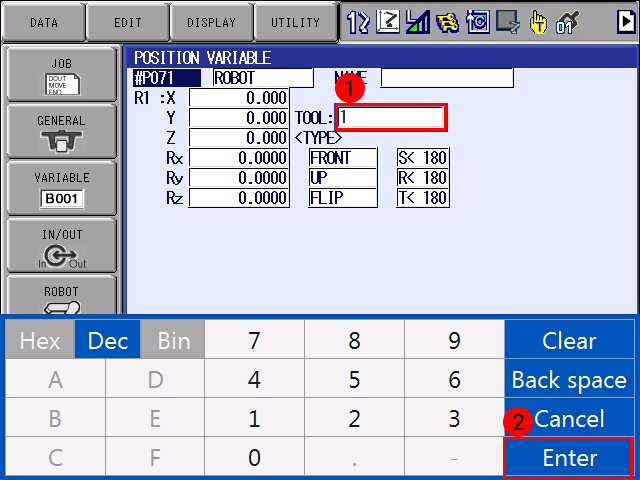
When the configuration is done, the interface is as follows.