Set up Standard Interface Communication with ABB (RobotWare 6)
This guide shows how to load the Standard Interface program files to an ABB robot, and set up the Standard Interface communication between Mech-Mind Vision System and the robot.
| In this section, you will load the robot Standard Interface program and the configuration files to the robot system to establish the Standard Interface communication between the vision system and the robot. |
Preparation
Check Controller and Software Compatibility
-
The robot is a 4-axis or 6-axis robot.
-
The robot controller is IRC5, and the version of RobotWare is 6.02 or above.
-
The RobotWare option 616-1 PC Interface is installed.
Click here for instructions
-
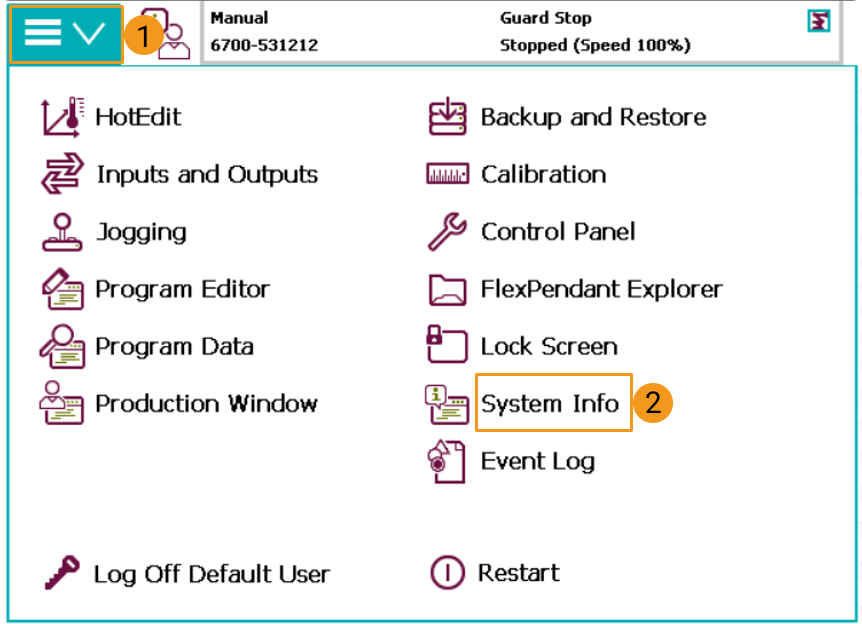
Tap the drop-down button in the upper-left corner, and select System Info.
-
Tap System properties and check if the version of RobotWare is above 6.02.

-
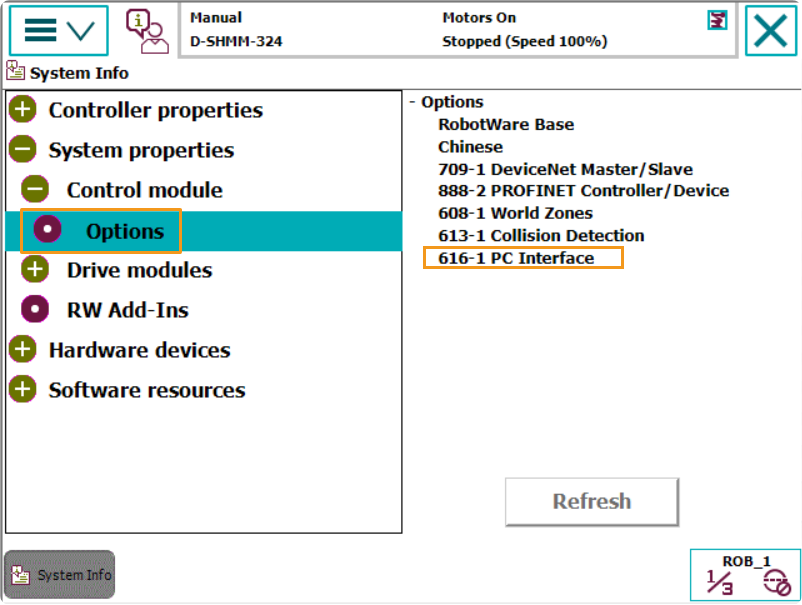
Tap Options, and check if the control module 616-1 PC Interface is installed.
-
| If the preceding conditions are not met, the vision system cannot communicate with the robot by using the Standard Interface. Contact the robot manufacturer for support. |
Set up the Network Connection
Hardware Connection
Plug the Ethernet cable of the IPC into the X6 (WAN) port of the robot controller, as shown below.

IP Address Configuration
You can set the IP address by using the teach pendant or RobotStudio.
-
Set the IP address by using the teach pendant
Click here for instructions
-
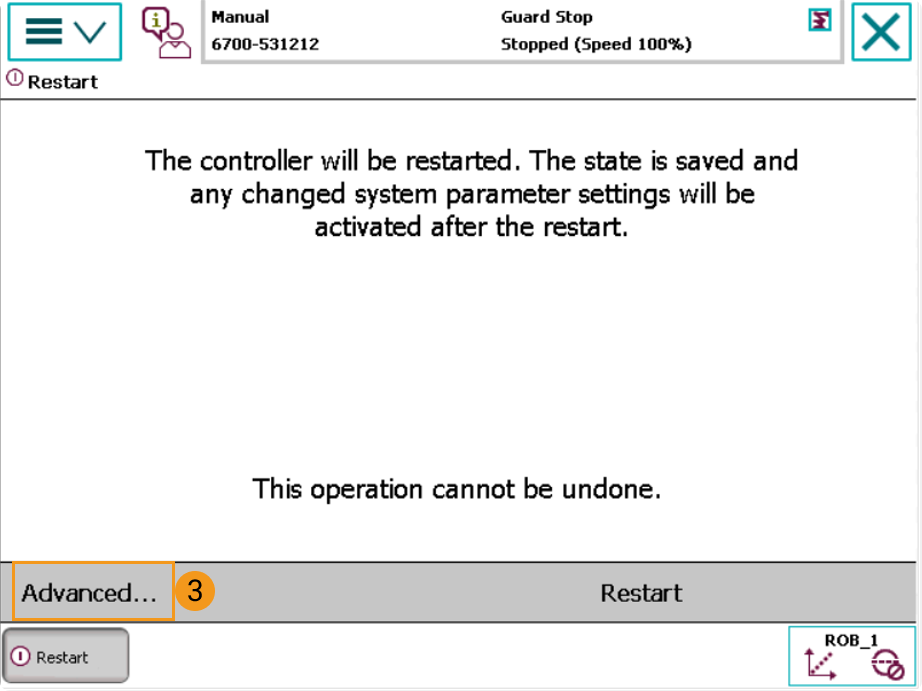
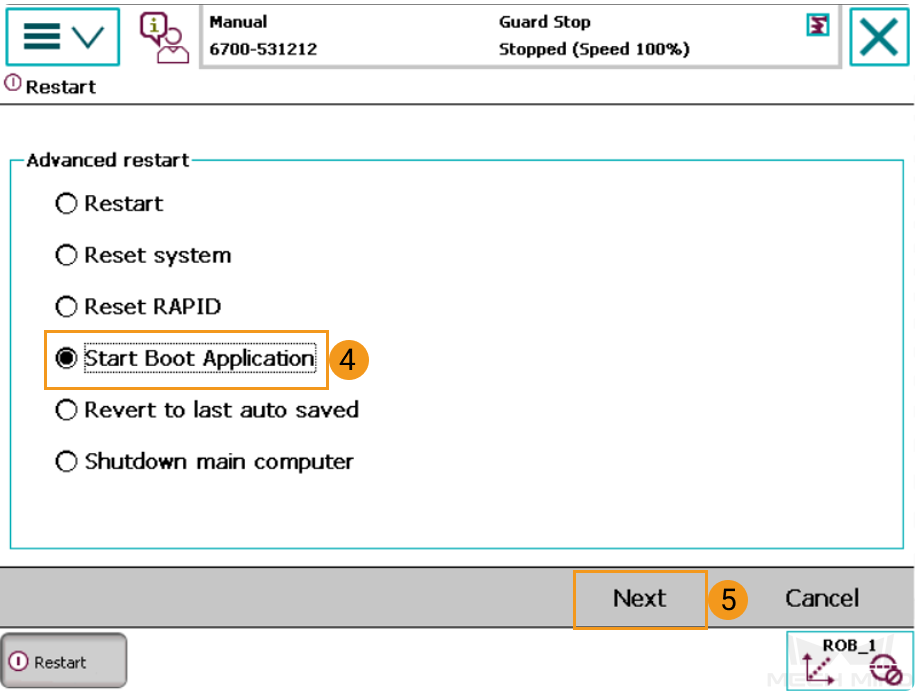
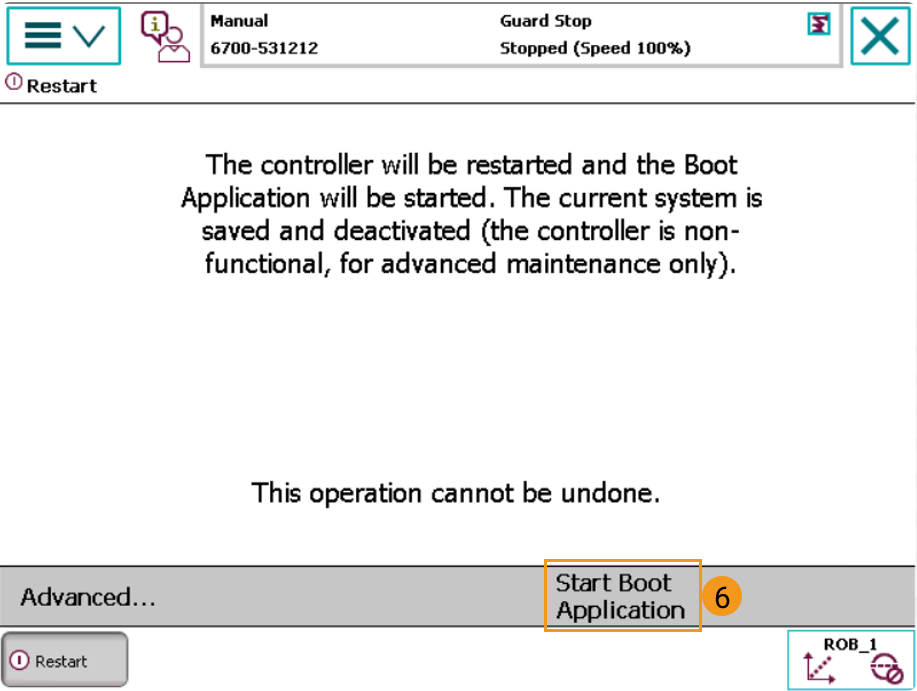
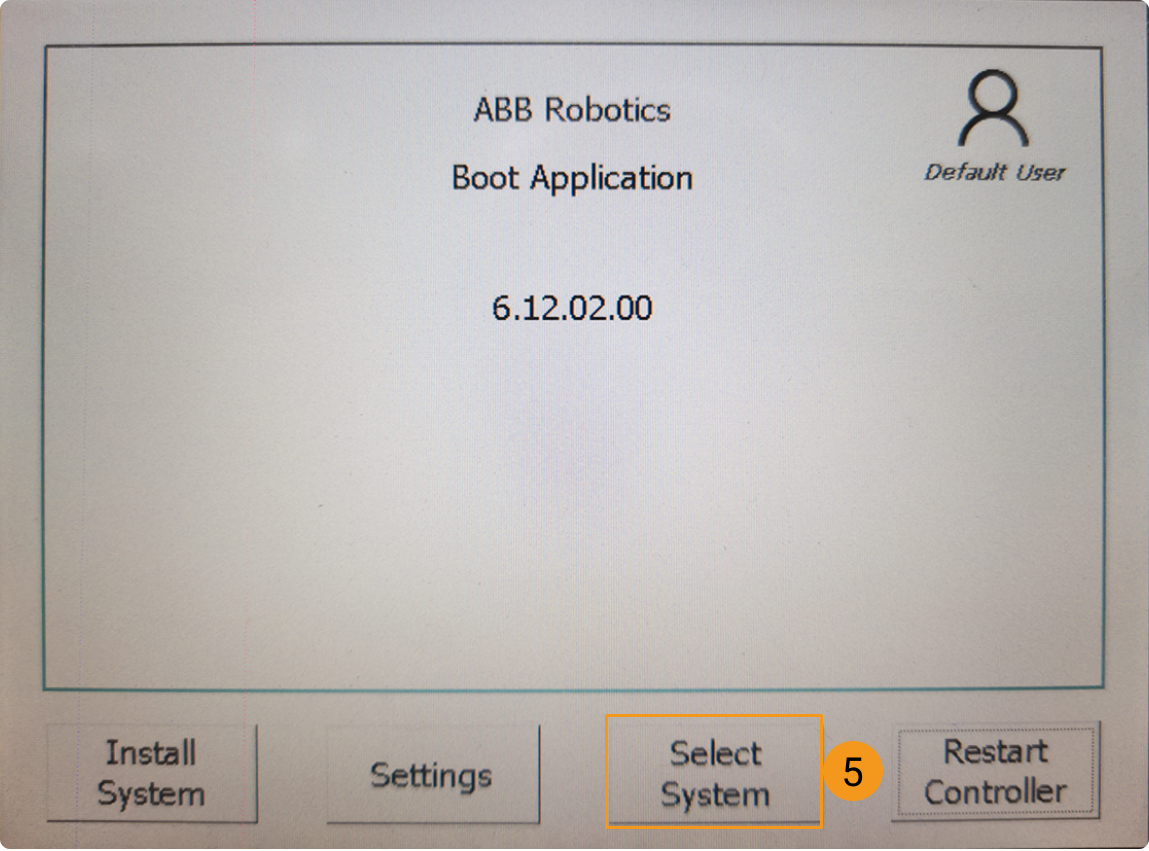
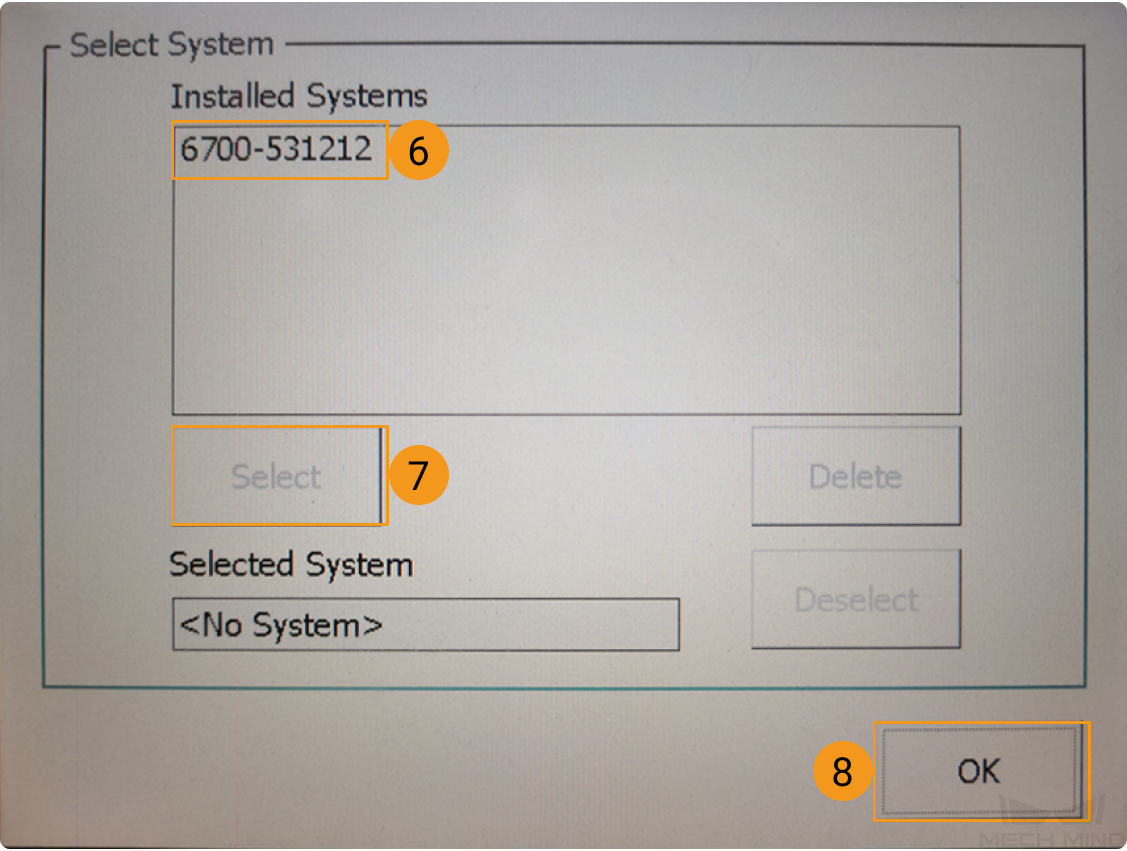
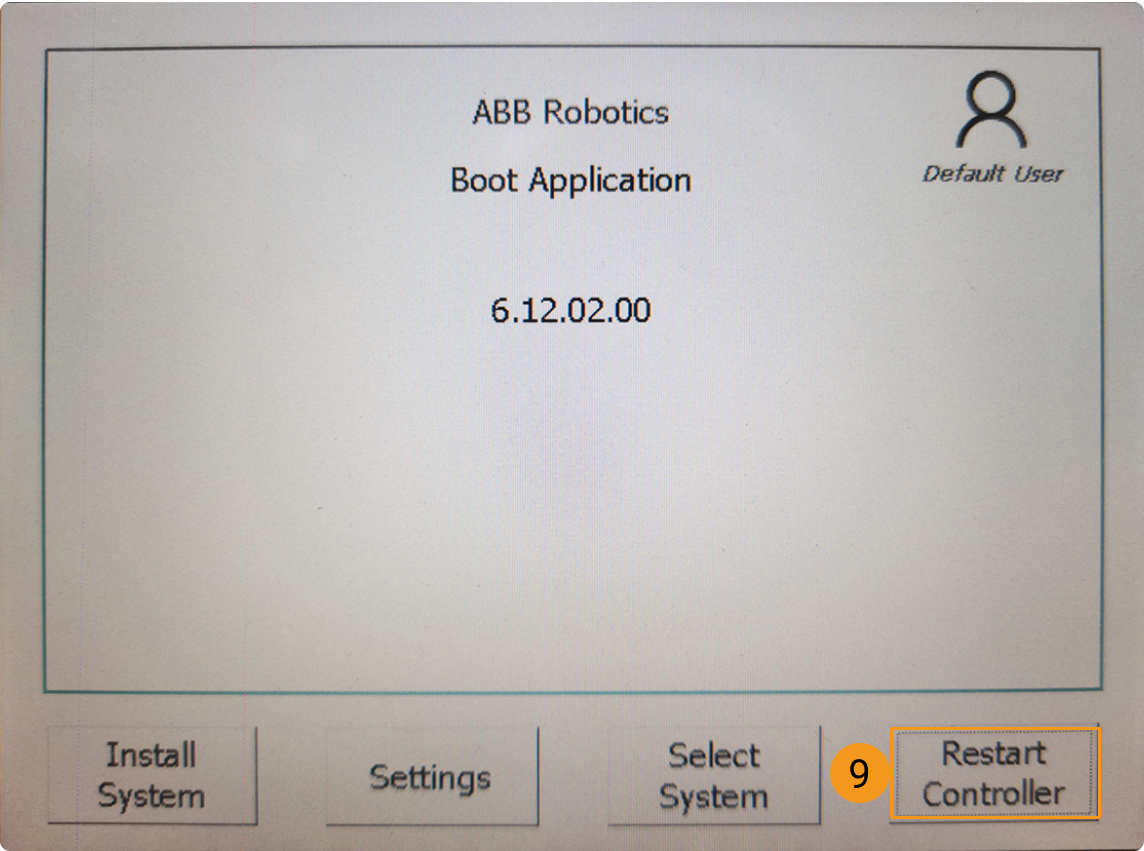
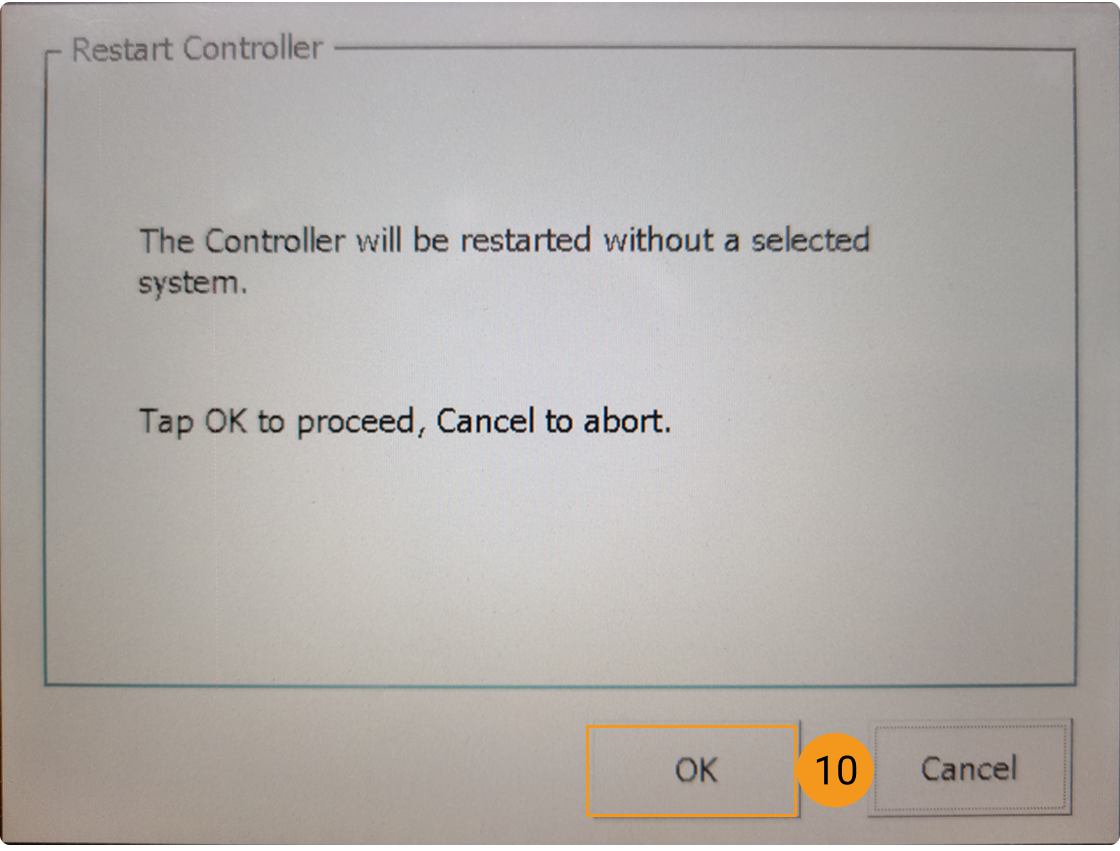
Follow the steps as shown in the figures below to start boot application.
-
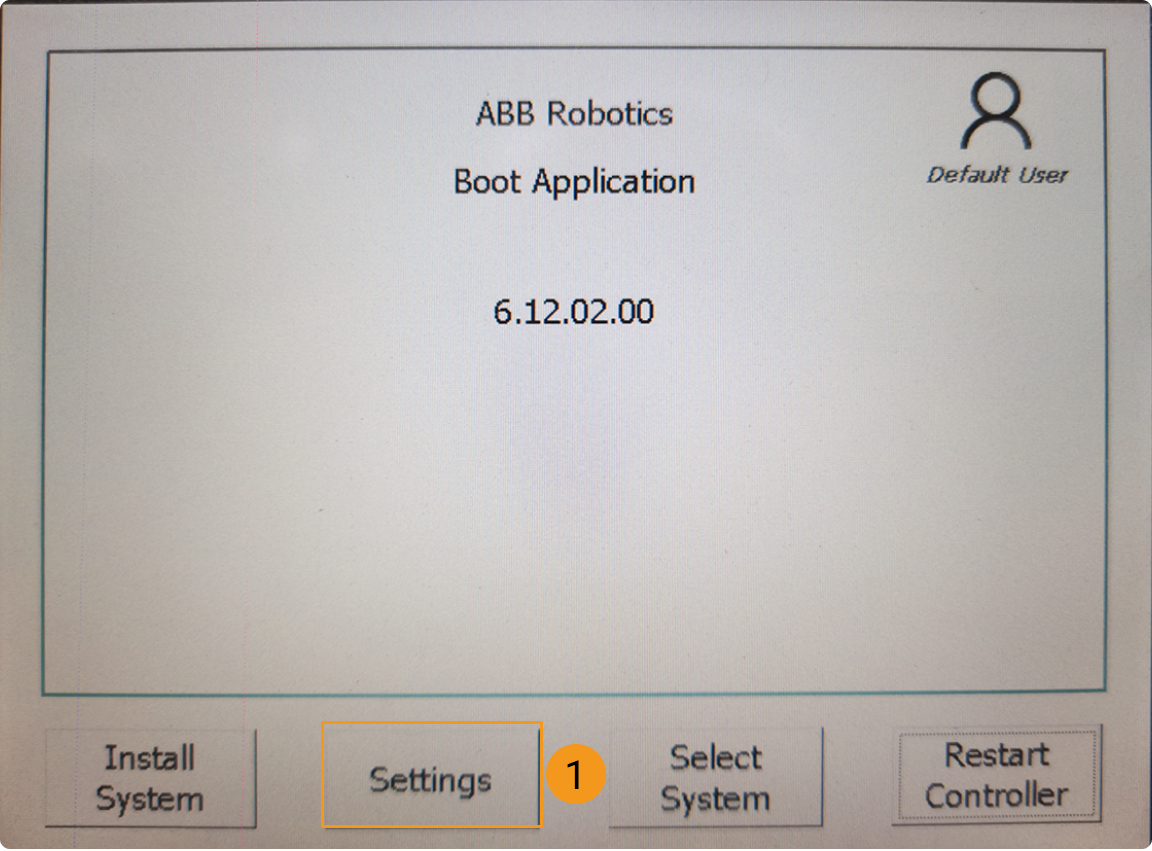
After the restart is complete, the following interface appears. Follow the steps below to configure the IP address. The IP addresses of the robot and the IPC must reside in the same subnet.
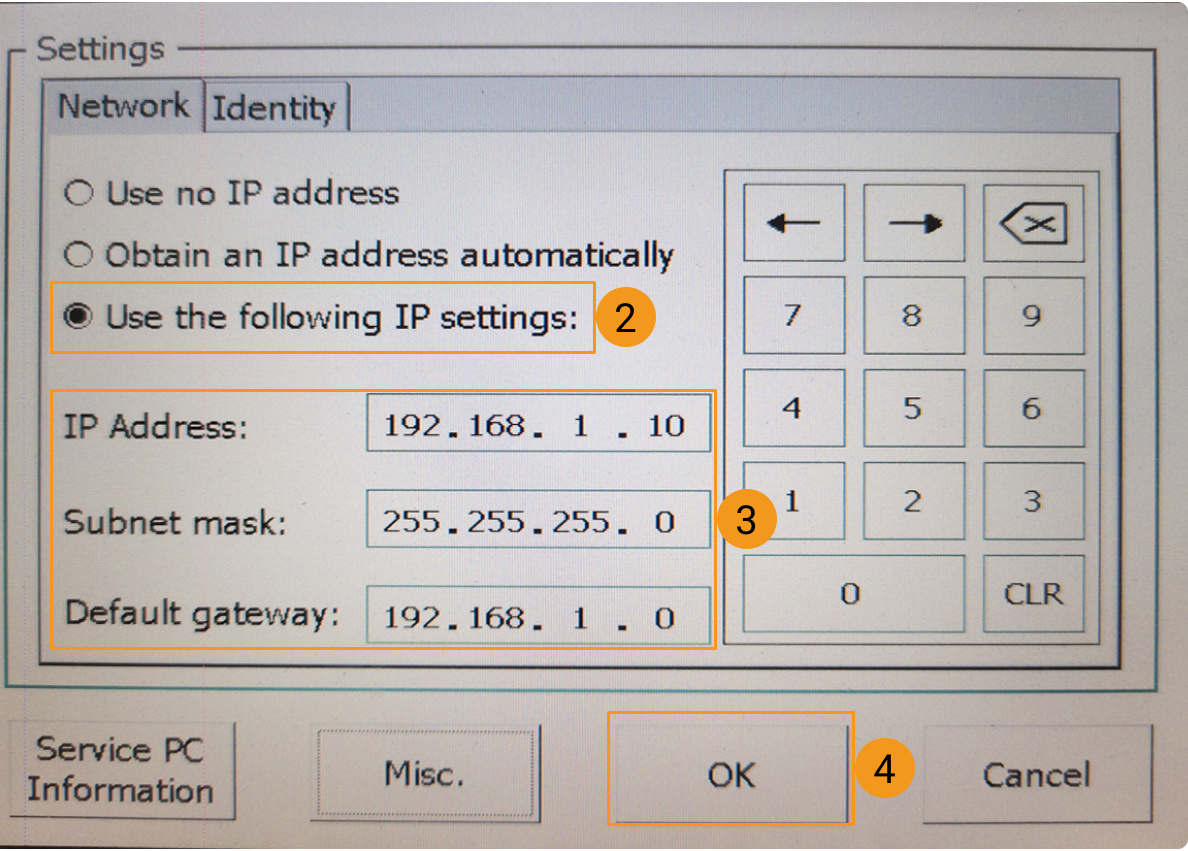
-
-
Set the IP address by using RobotStudio
Click here for instructions
-
Follow the steps below to set the IP address and then restart the robot.
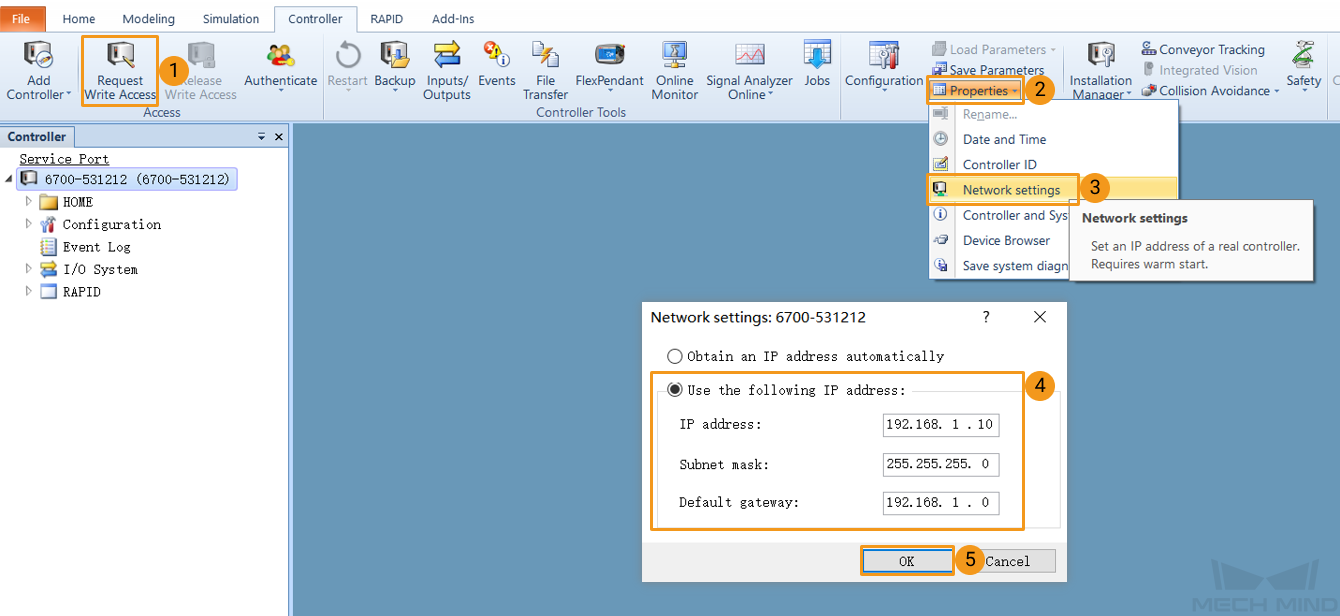
-
Check if the specified IP address takes effect.

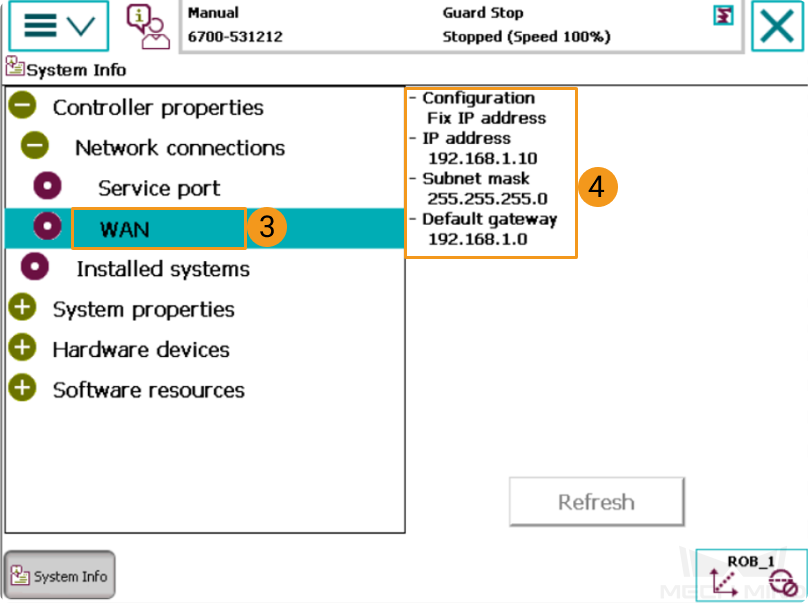
-
Set up Robot Communication Configuration
-
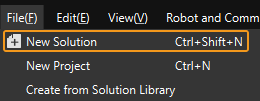
Run Mech-Vision, and you may enter different interfaces. Create a new solution according to the instructions below.
-
If you have entered the Welcome interface, click New blank solution.

-
If you have entered the main interface, click on the menu bar.
-
-
Click Robot Communication Configuration on the toolbar of Mech-Vision.
-
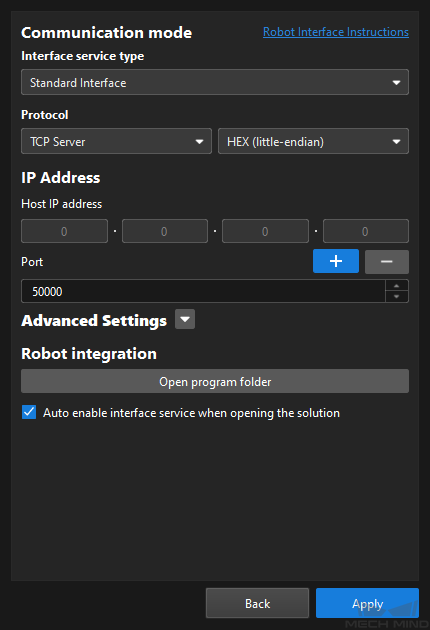
In the Robot Communication Configuration window, complete the following configurations.
-
Click the Select robot drop-down menu, and select Listed robot. Click Select robot model, and select the robot model that you use. Then, click Next.
-
In the Communication mode area, select Standard Interface for Interface service type, TCP Server for Protocol, and HEX (little-endian) for the protocol format.
-
It is recommended to set the port number to 50000 or above. Ensure that the port number is not occupied by another program.
-
(Optional) Select Auto enable interface service when opening the solution.
-
Click Apply.
-
-
On the main interface of Mech-Vision, make sure that the Robot Communication Configuration switch on the toolbar is flipped and has turned blue.

Backup
Back up the robot system before you operate the robot. This way, if any errors occurs, you can restore the robot system. You can back up the files by using the teach pendant or RobotStudio.
-
Back up the files by using teach pendant
Click here for instructions
-
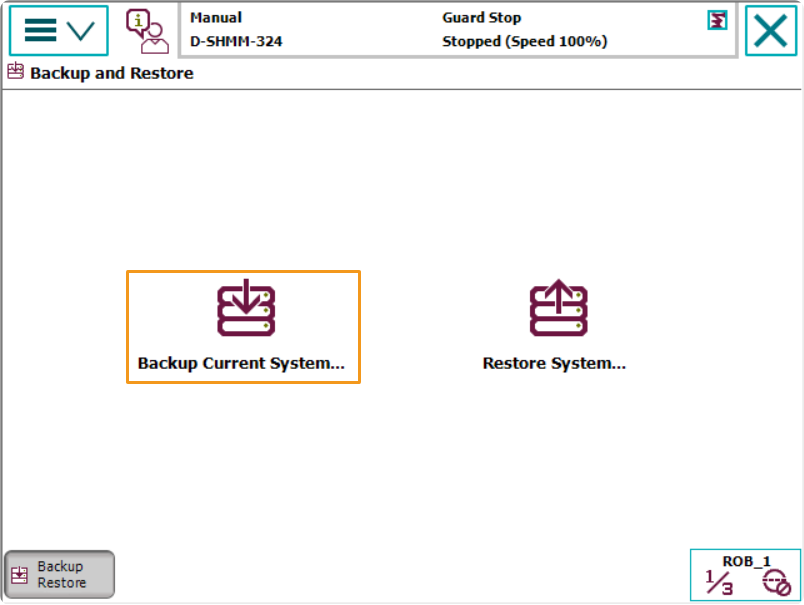
Go to the home interface by tapping the menu in the upper-left corner, and then select Backup and Restore.
-
Select Backup Current System….
-
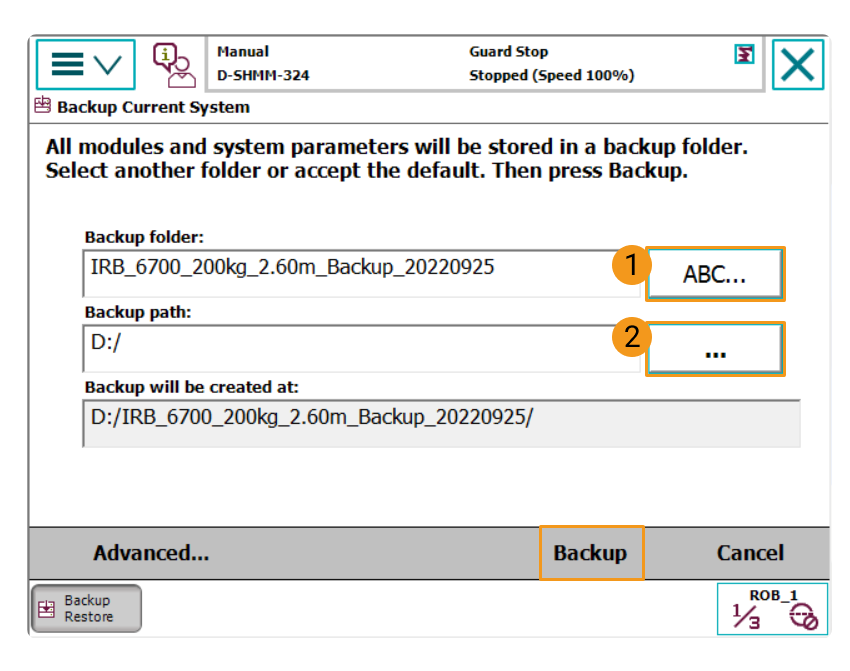
Specify the backup file name by tapping 1, and specify the directory for saving the file by tapping 2. Then, tap Backup in the lower-right corner to start the backup process.
-
-
Back up the files by using RobotStudio
Click here for instructions
-
In the home interface of RobotStudio, select the controller you want to backup, and then select .
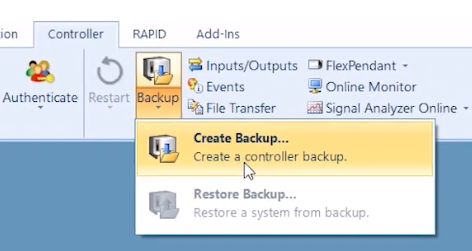
-
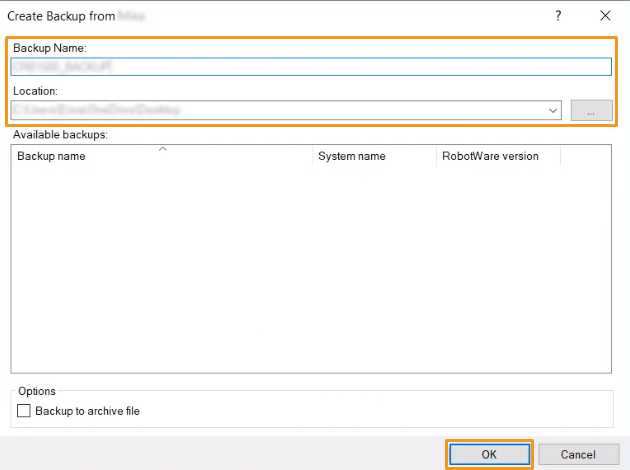
In the pop-up window, confirm the backup name and location and then click OK.
-
Resetting
Two types of resetting exist: resetting the system and resetting RAPID.
-
Resetting RAPID deletes the current RAPID program and data while retaining system parameter settings.
Click here for instructions
-
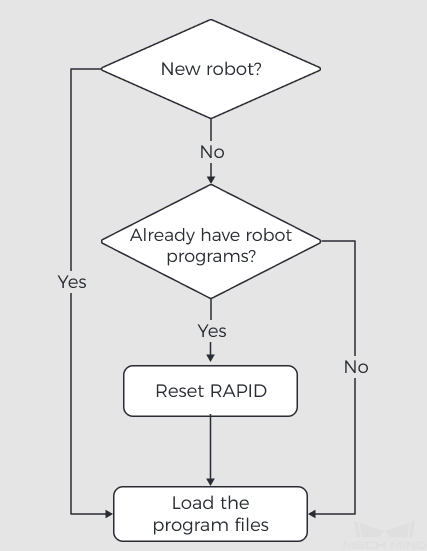
Determine whether you need to reset RAPID based on the following flowchart.
-
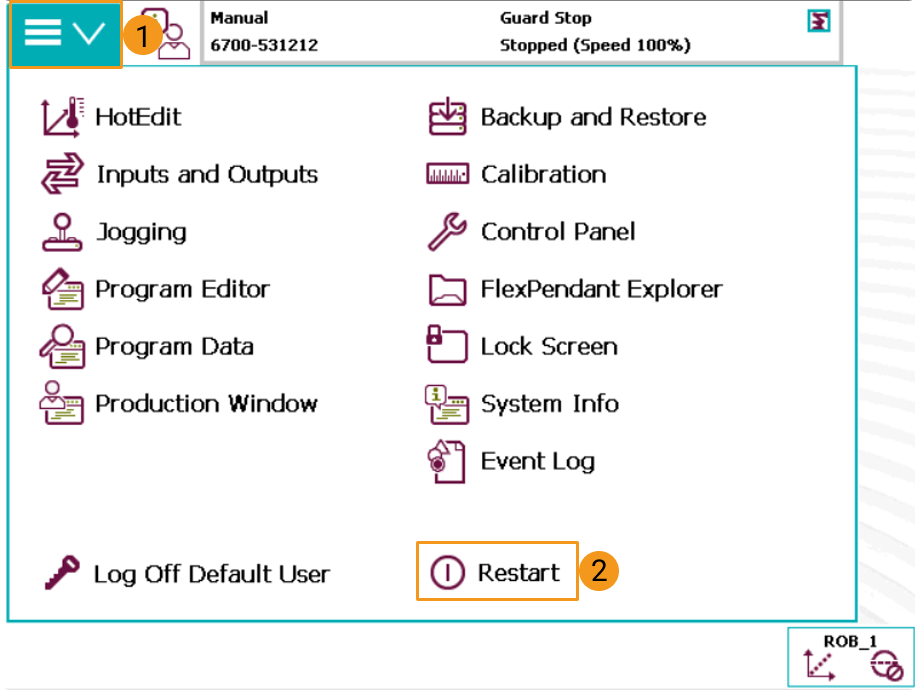
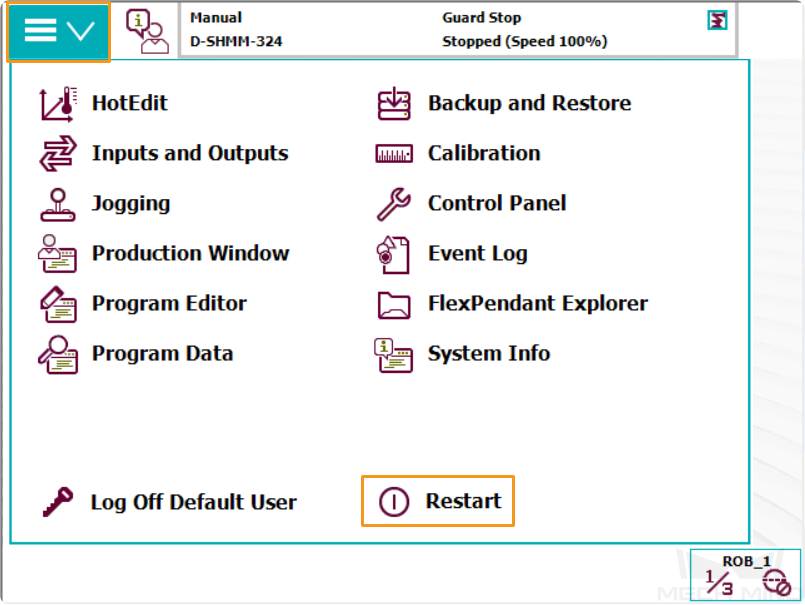
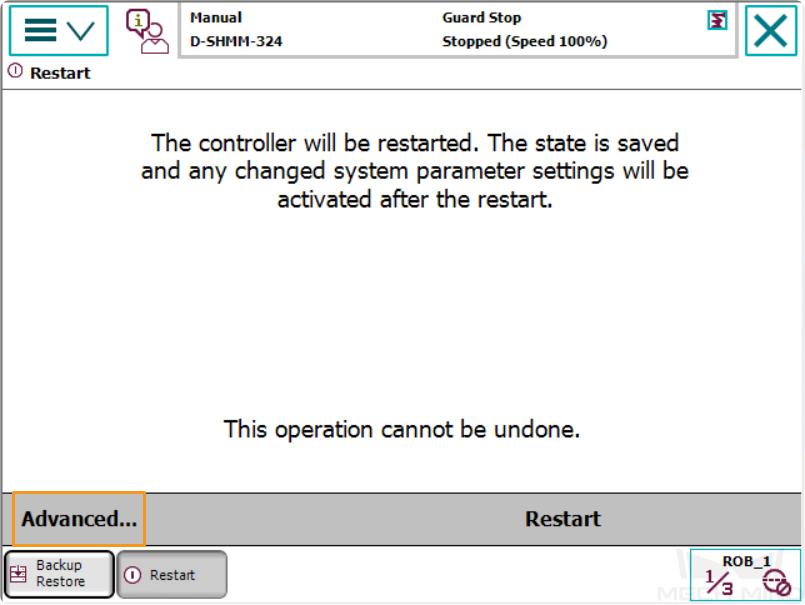
Go to the home interface by tapping the menu in the upper-left corner, and then select Restart.

-
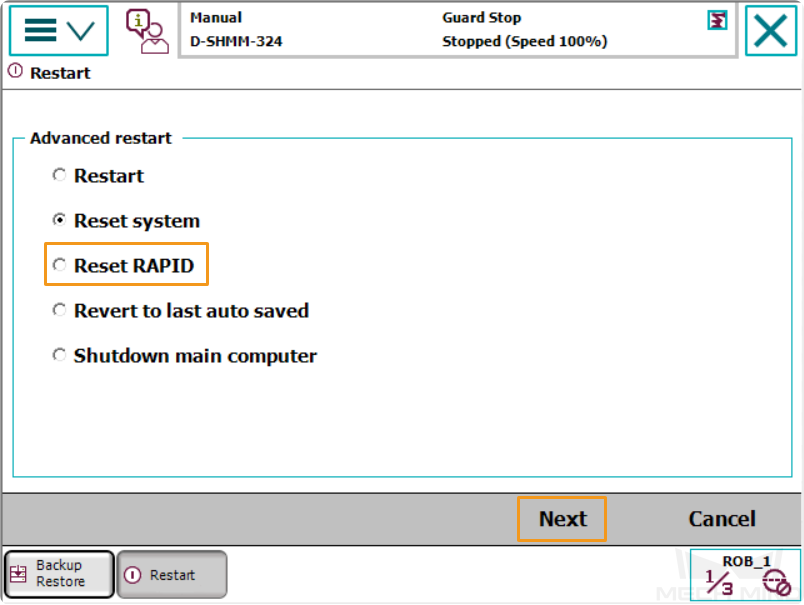
Tap Advanced….
-
Select Reset RAPID, and then tap Next.
-
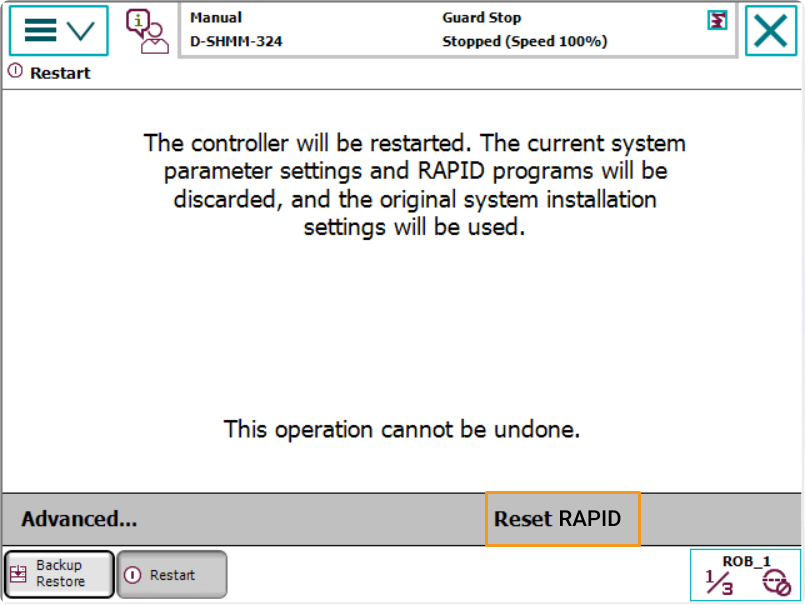
Tap Reset RAPID.
-
-
Resetting the system restores the default system parameters and RAPID program, and resets the I/O settings. If a communication board or other communication devices are used, you must re-configure them after the system is reset.
Click here for instructions
-
Resetting the system restores factory settings. Make sure that the backup operation is performed.
-
Go to the home interface by tapping the menu in the upper-left corner, and then select Restart.
-
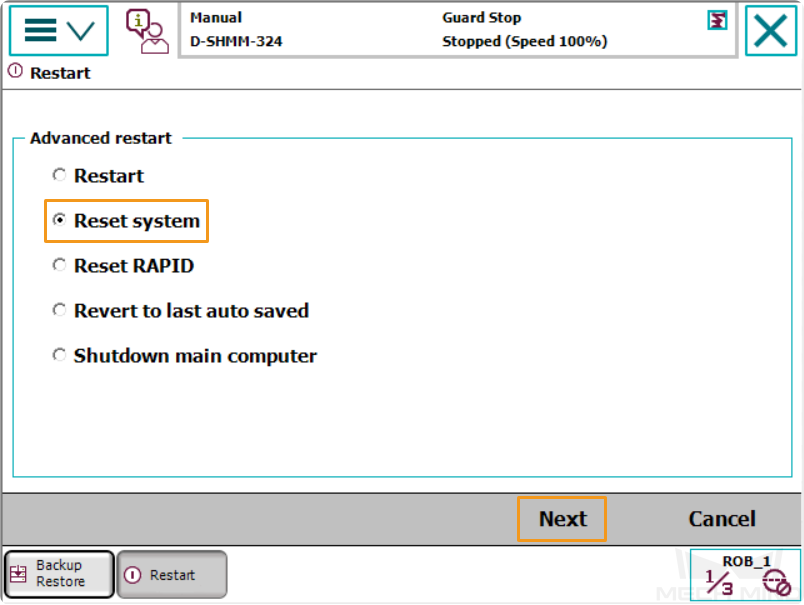
Tap Advanced….
-
Select Reset system and then tap Next.
-
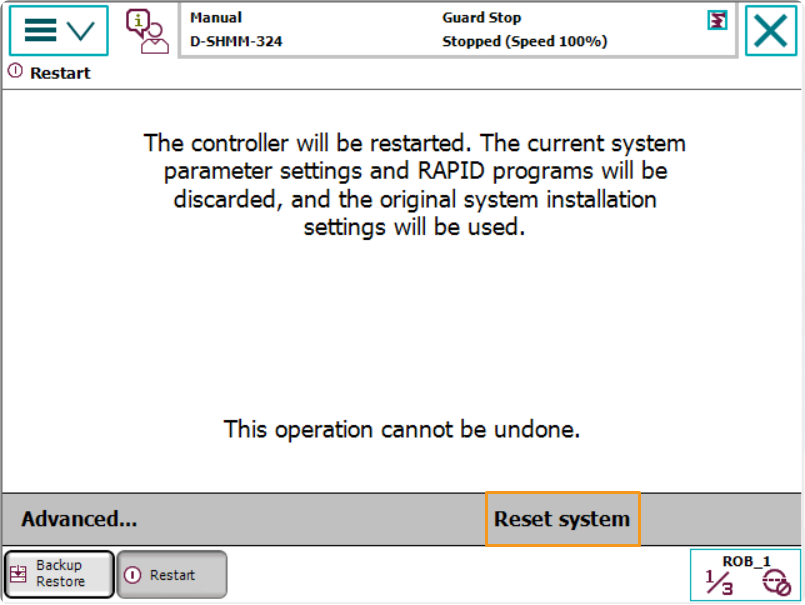
Tap Reset system.
-
Prepare Program Files
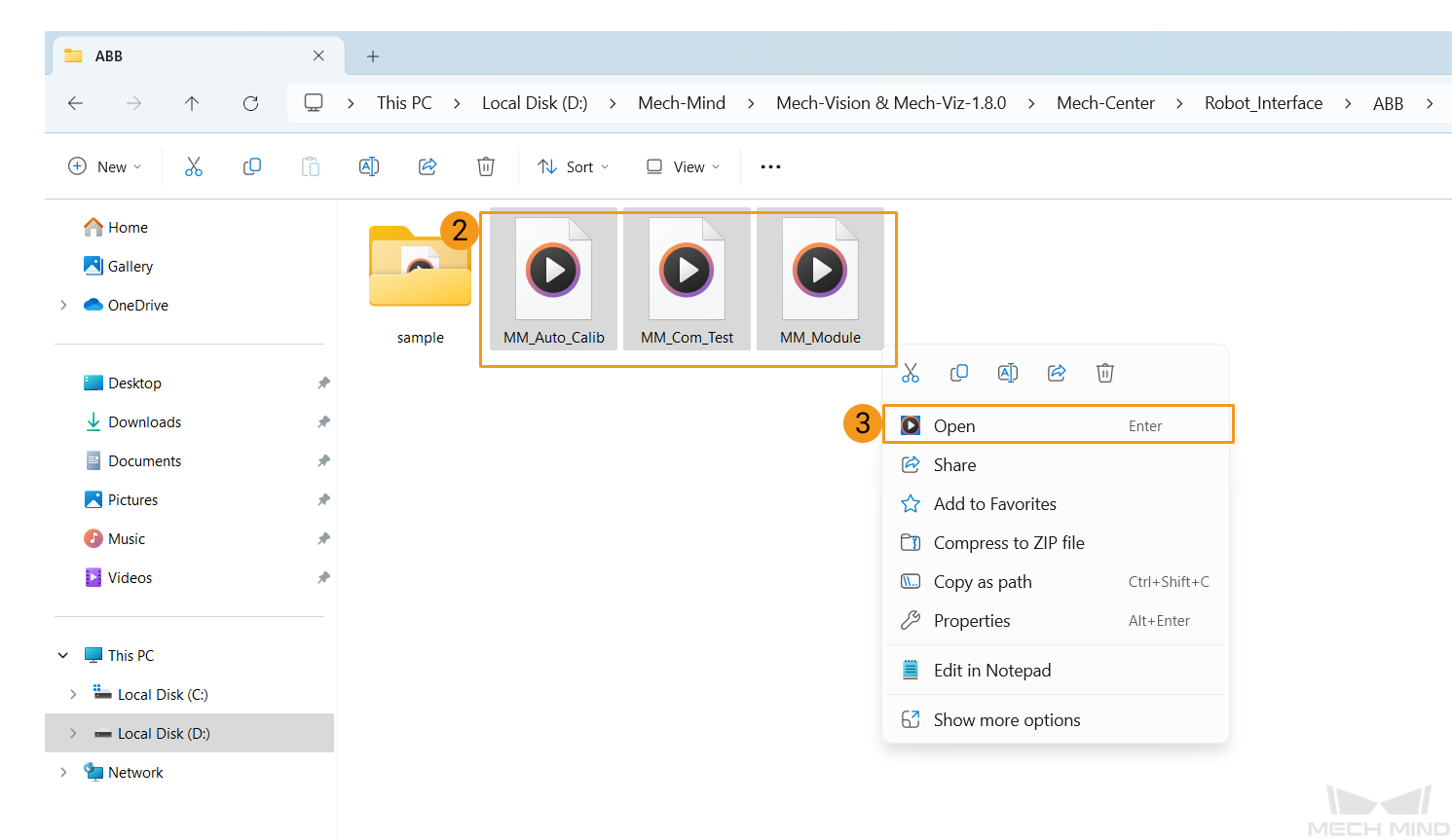
Copy the following three program modules (program files) from Mech-Center\Robot_Interface\ABB in the directory where Mech-Vision & Mech-Viz are installed and paste them into the flash drive.
-
MM_Module.mod (program module file)
-
MM_Auto_Calib.mod (calibration program module file)
-
MM_Com_Test.mod (communication-testing program module file)
Load the Program Files to the Robot
You can load the program files by using the teach pendant or RobotStudio. Before you begin, make sure that the robot is in manual mode.

-
Load the program files by using the teach pendant
Click here for instructions
-
Plug the flash drive into the USB port on the back of the teach pendant.
-
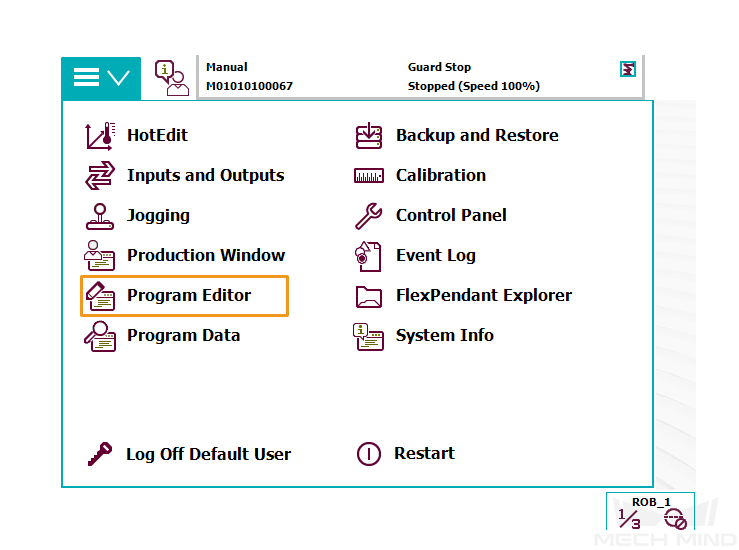
Tap Program Editor.
-
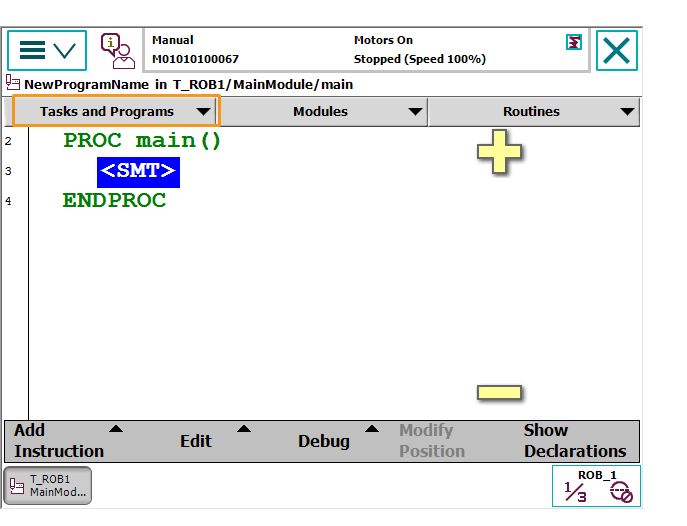
Tap Tasks and Programs.
-
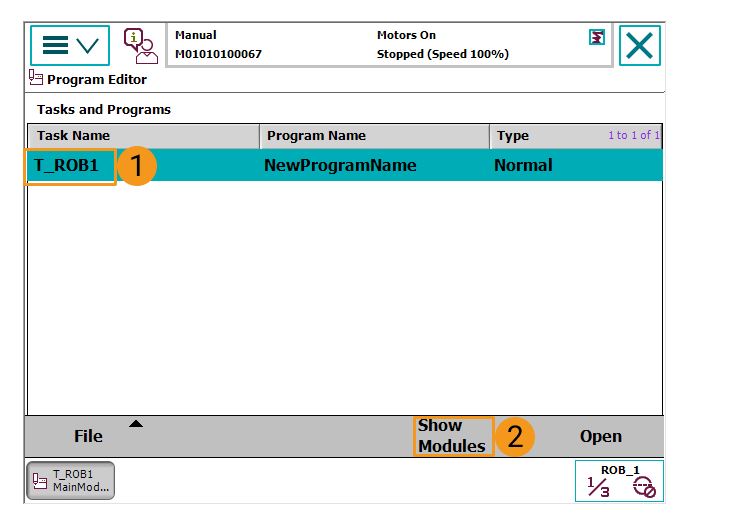
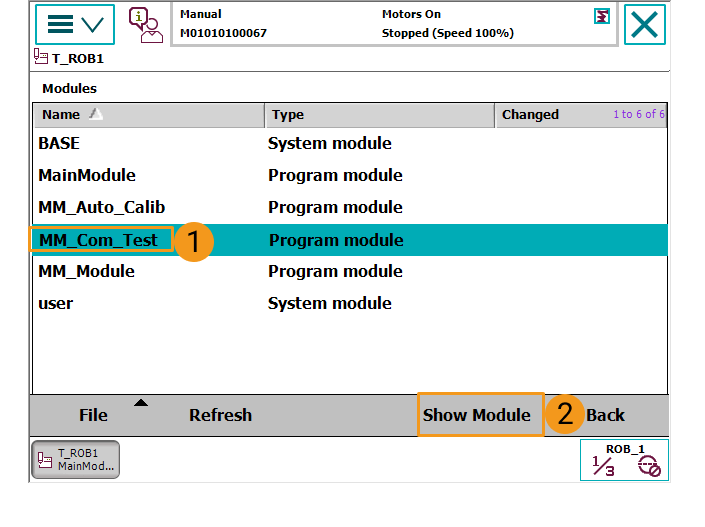
Select T_ROB1 and tap Show Modules.
-
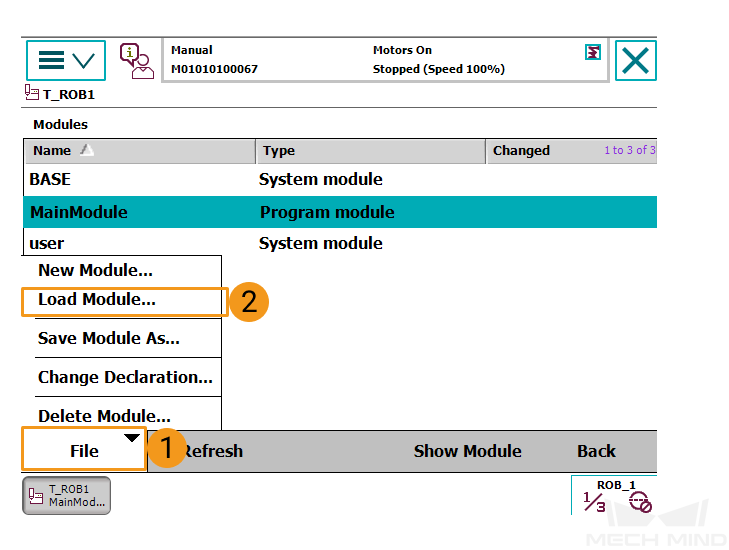
Select .
-
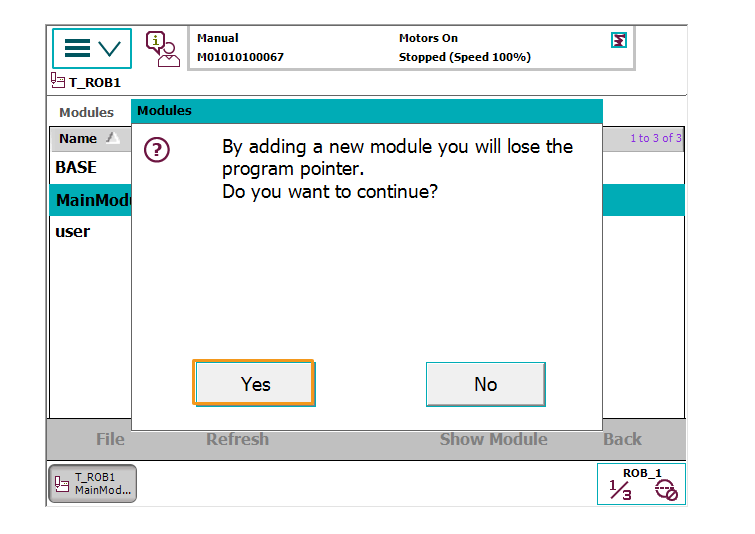
Select Yes in the pop-up window.
-
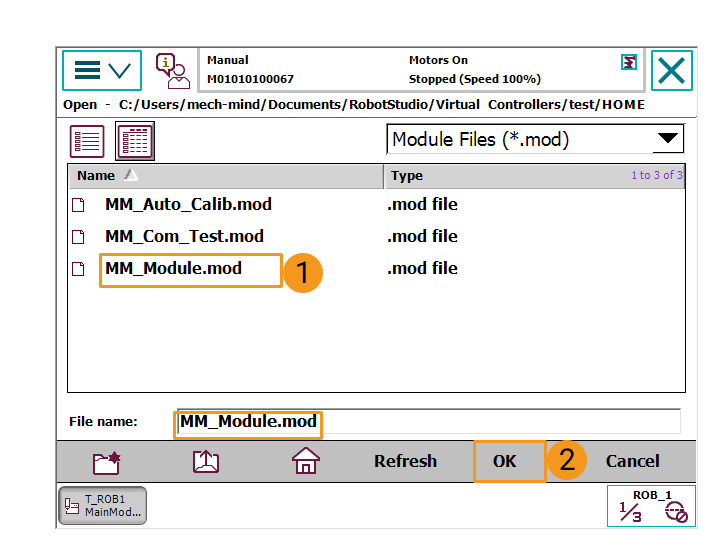
Find the program files in the flash drive and select MM_Module.mod to display MM_Module.mod as the file name in the lower part. Then, tap Yes.
-
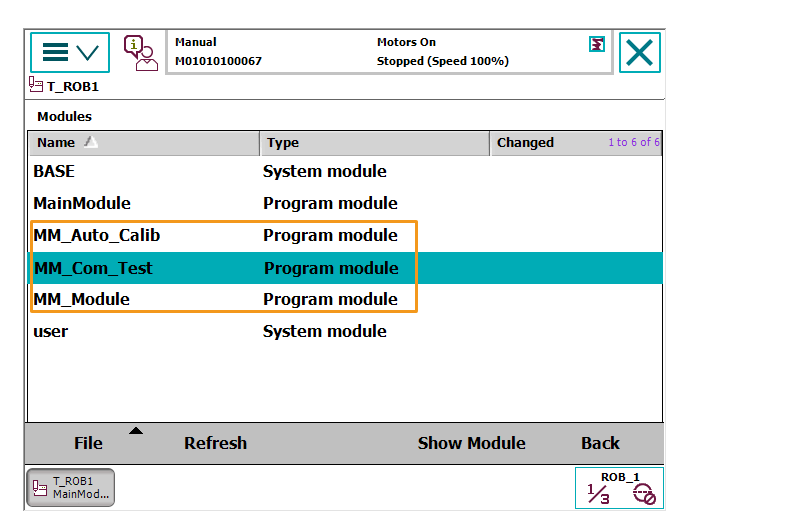
Repeat the preceding instructions to load MM_Auto_Calib.mod and MM_Com_Test.mod. Then, check whether the three files are loaded under T_ROB1.
-
-
Load the program files by using RobotStudio
Click here for instructions
-
Open RobotStudio and connect to the controller.
-
If the robot controller is connected by using the LAN port, click One Click Connect….

-
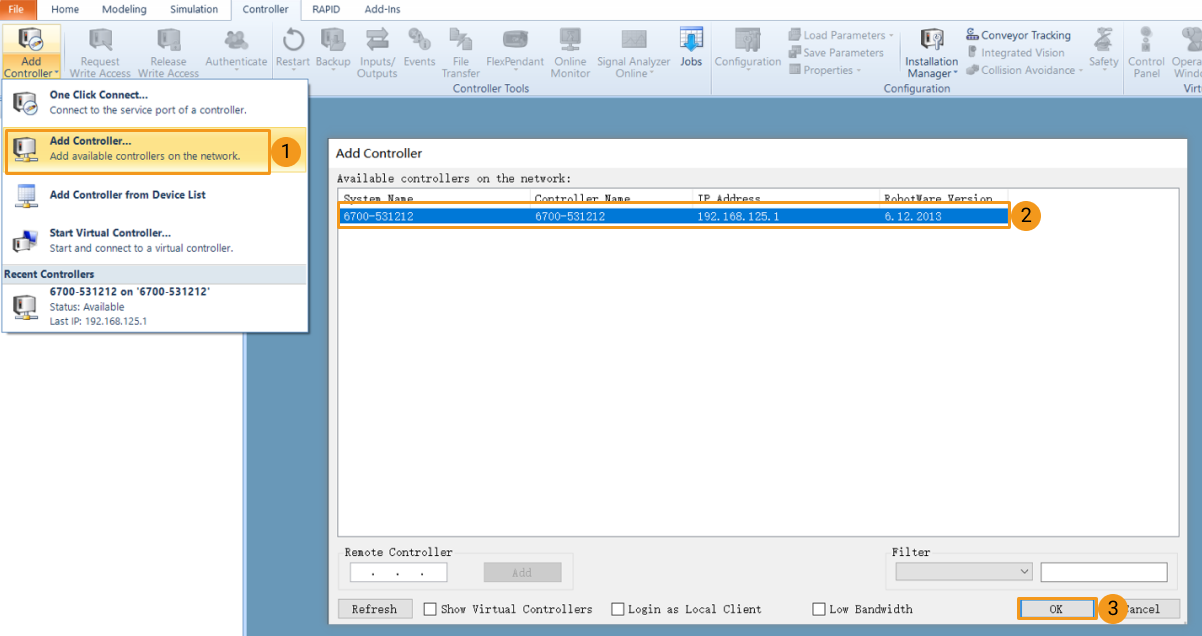
If the robot controller is connected by using the X6 (WAN) port or a switch, click Add Controller and then select the controller and click OK. If the controller is added, RobotStudio will be connected to the service port of the controller automatically.
-
. Click Request Write Access to request the write access to the teach pendant.
+ image::abb/setup-instructions/load_program2_1.png[align="center",width=480,height=320]
+ Tap Grant in the Request Write Access window on the teach pendant.
-
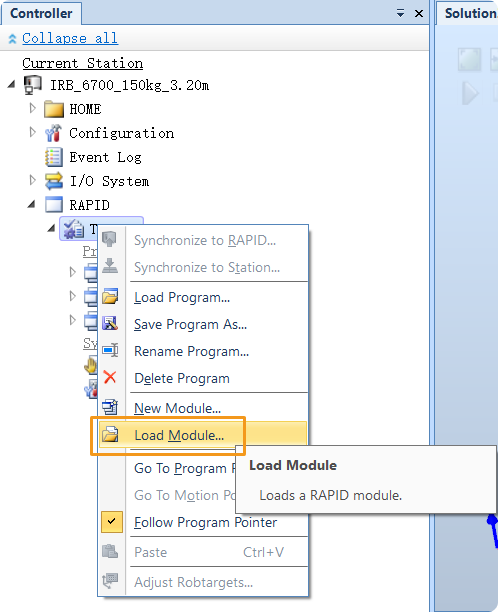
As shown in the figure below, find and right-click T_ROB1, and select Load Module in the menu.
-
Select the program module files and click Open.
-
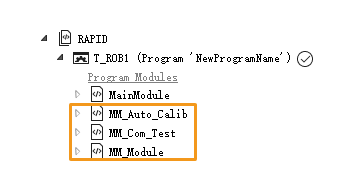
Confirm that the three program files appear under T_ROB1.
-
Test Standard Interface Communication
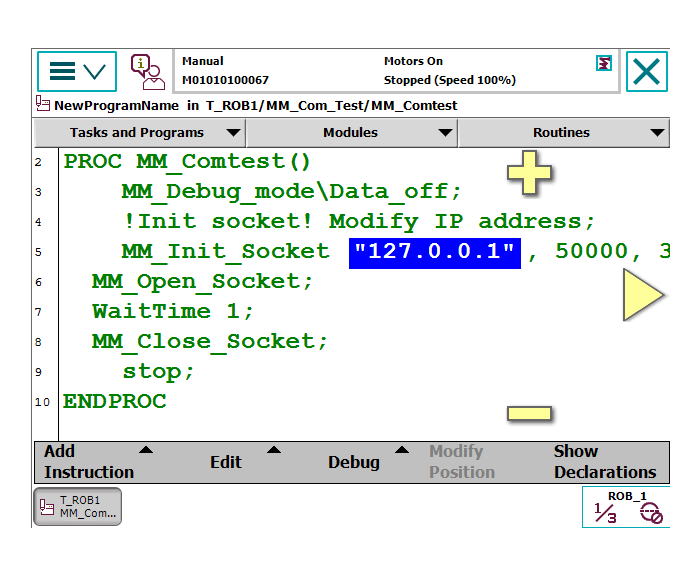
Select and Modify the Program Used for the Communication Test
-
Select MM_Com_Test and tap Show Module.
-
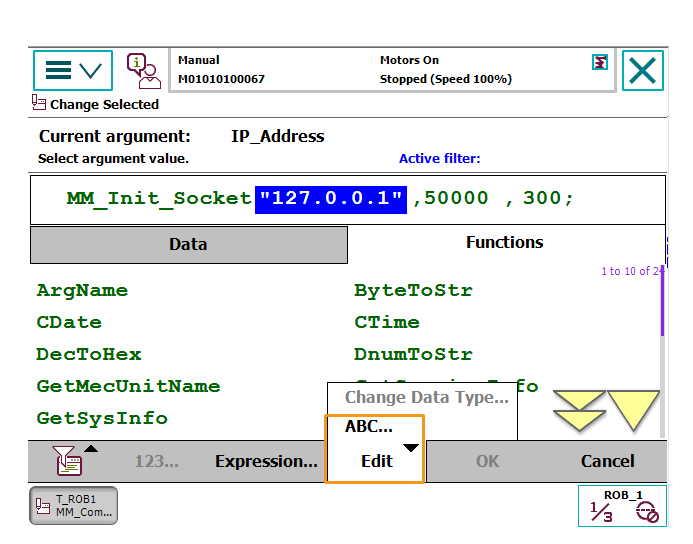
Double-tap the IP address, select , change the IP address to the IP address of the IPC, and then click OK. If the host port number set in Mech-Vision is modified, the port number 50000 here should be changed to the host port number in Mech-Vision.
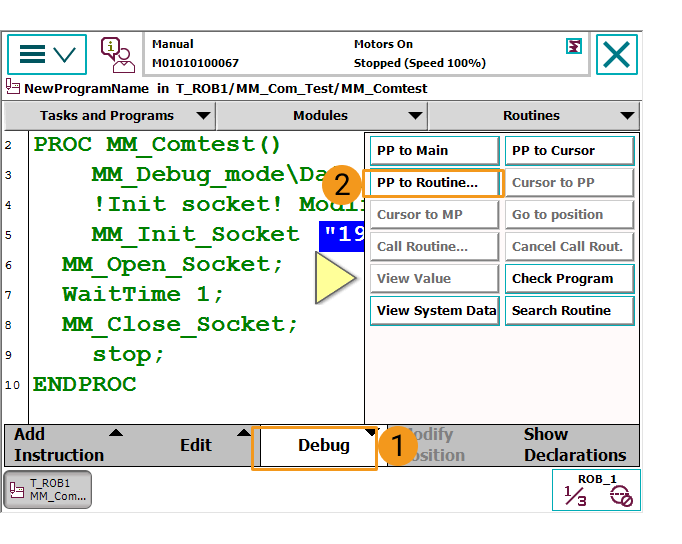
Run the Program and Test Connection
-
In the following interface, select .
-
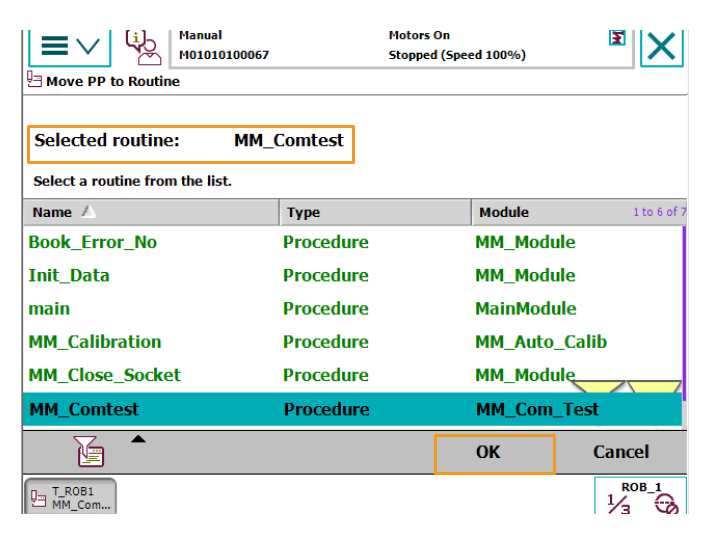
Select MM_Comtest and tap OK.
-
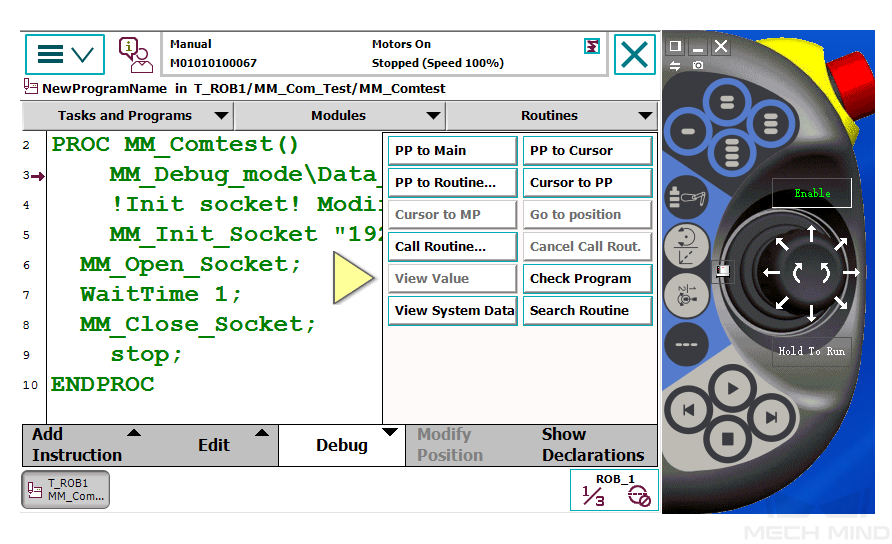
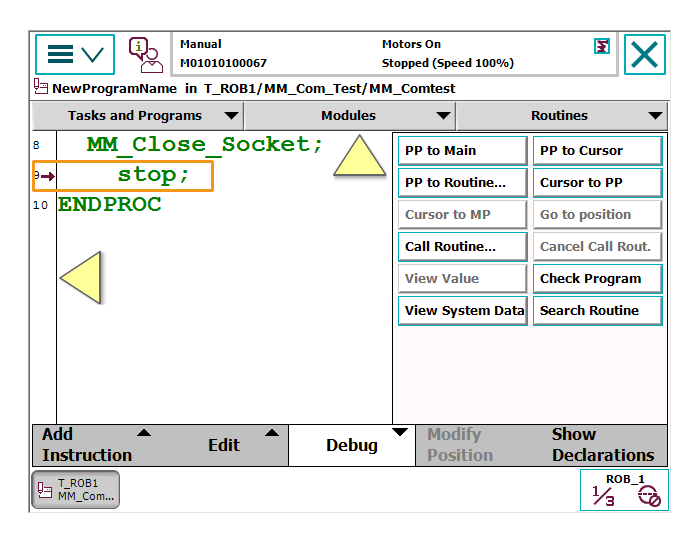
Repeatedly tap the single-step execution button on the teach pendant to execute the program until the PP moves to line 9.
-
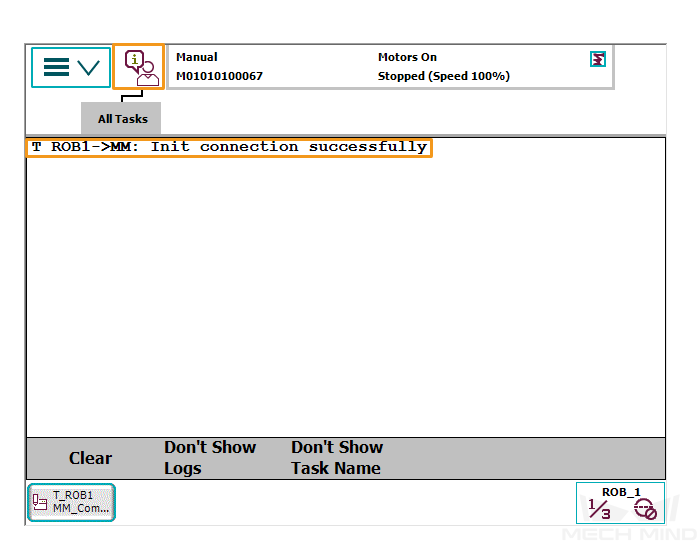
Tap the following button to view the following message.
-
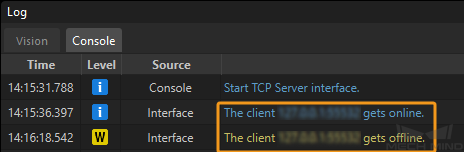
If the communication between the robot and the vision system is set up, a log will be recorded on the Console tab of the Log panel of Mech-Vision.