Register Instructions
The data type used by the PLC is the MM_Interface struct, which occupies 728 D registers. The start and end addresses of the variables in the struct should be the same as that set in Mech-Vision. When the start address set in the PLC and Mech-Vision is 10000, the register addresses of each variable are shown in the figure below.
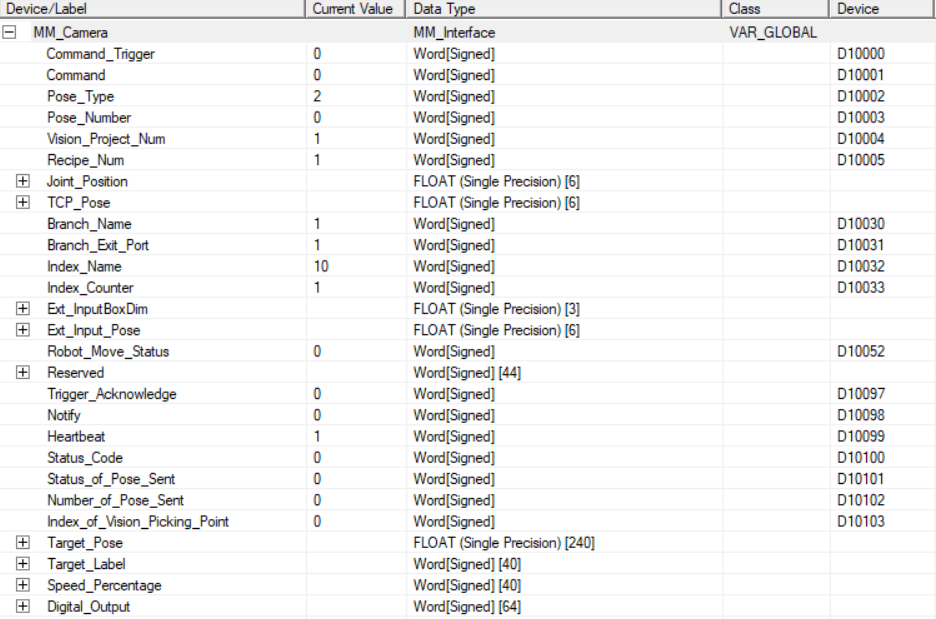
The address offset from the start (base) address and descriptions of the registers for each variable are listed in the table below.
| Address offset | Name | Data type | Description |
|---|---|---|---|
0 |
Command_Trigger |
Word[Signed] |
Trigger the signal |
1 |
Command |
Word[Signed] |
Command code |
2 |
Pose_Type |
Word[Signed] |
Pose type |
3 |
Pose_Number |
Word[Signed] |
Expected number of vision points |
4 |
Vision_Project_Num |
Word[Signed] |
Mech-Vision project ID |
5 |
Recipe_Num |
Word[Signed] |
Mech-Vision parameter recipe ID |
6 |
Joint_Position |
Float[Single Precision][6] |
Joint position data |
18 |
TCP_Pose |
Float[Single Precision][6] |
Flange pose data |
30 |
Branch_Name |
Word[Signed] |
The Step ID of the “Branch by Msg” Step in Mech-Viz |
31 |
Branch_Exit_Port |
Word[Signed] |
The number of the exit port of the “Branch by Msg” Step in Mech-Viz |
32 |
Index_Name |
Word[Signed] |
Step ID of the Mech-Viz Step with the Current Index parameter. |
33 |
Index_Counter |
Word[Signed] |
The index value that should be set the next time this Step is executed. |
34 |
Ext_InputBoxDim |
Float[Single Precision][3] |
The object dimensions (length, width, and height in mm) to be input to the Mech-Vision project |
40 |
Ext_Input_Pose |
Float[Single Precision][6] |
The external TCP data to be input to the Mech-Viz project |
52 |
Robot_Move_Status |
Word[Signed] |
Robot motion status |
53 |
Reserved |
Word[Signed][44] |
Reserved field |
97 |
Trigger_Acknowledge |
Word[Signed] |
Trigger confirmation |
98 |
Notify |
Word[Signed] |
Custom notification message |
99 |
Heartbeat |
Word[Signed] |
Heartbeat value |
100 |
Status_Code |
Word[Signed] |
Status code |
101 |
Status_of_Pose_Sent |
Word[Signed] |
Data transmission status |
102 |
Number_of_Pose_Sent |
Word[Signed] |
Number of poses sent |
103 |
Index_of_Vision_Picking_Point |
Word[Signed] |
Position of “Vision Move” in the planned path |
104 |
Target_Pose |
Float[Single Precision][240] |
Pose data |
584 |
Target_Label |
Word[Signed][40] |
Labels corresponding to the poses |
624 |
Speed_Percentage |
Word[Signed][40] |
Velocity percentage value |
664 |
Digital_Output |
Word[Signed][40] |
Digital output signal |