JAKA Calibration Program
This topic introduces the process of automatic hand-eye calibration when a JAKA robot communicates with Mech-Mind Vision System through Standard Interface.
| Before proceeding, please make sure that you have set up Standard Interface communication with the robot. |
Run the Calibration Program
-
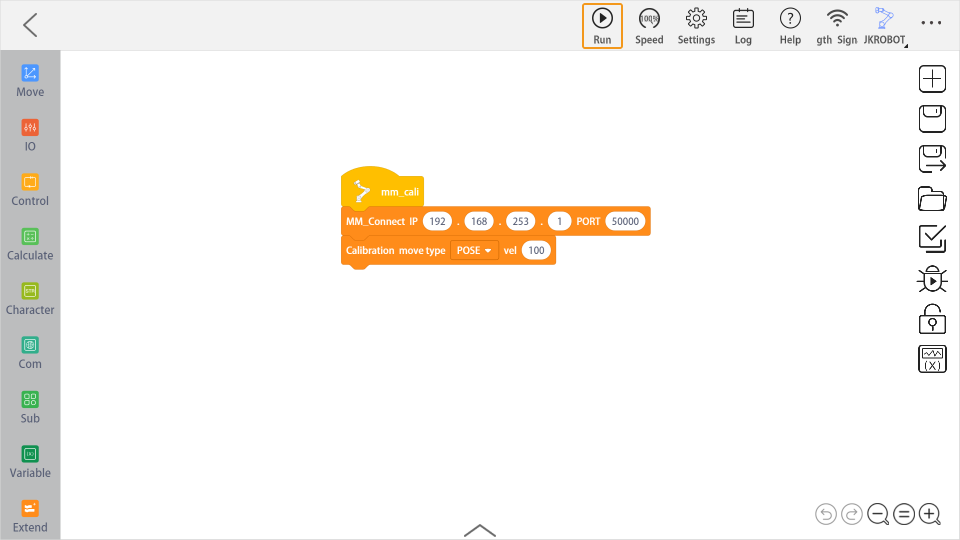
In the Programming control window, drag the two instructions below, or open the loaded mm_cali program.

-
Click Run on the toolbar.
-
Make sure that the message “Entering the calibration process, please start the calibration in Mech-Vision” is displayed in the Console tab of Mech-Vision Log panel.
Complete Calibration in Mech-Vision
-
In Mech-Vision, click Camera Calibration (Standard) on the toolbar, or select from the menu bar.
-
Follow the instructions based on different camera mounting methods to complete the configuration.
-
If the camera is mounted in the Eye to Hand mode, please refer to Complete Automatic Calibration in the Eye to Hand Scenario.
-
If the camera is mounted in the Eye in Hand mode, please refer to Complete Automatic Calibration in the Eye in Hand Scenario.
-
| If the robot does not reach the next calibration point within 60 seconds, Mech-Vision will report a timeout error and stop the calibration process. In such cases, please select and run the calibration program on the teach pendant again, and restart the calibration process in Mech-Vision. |