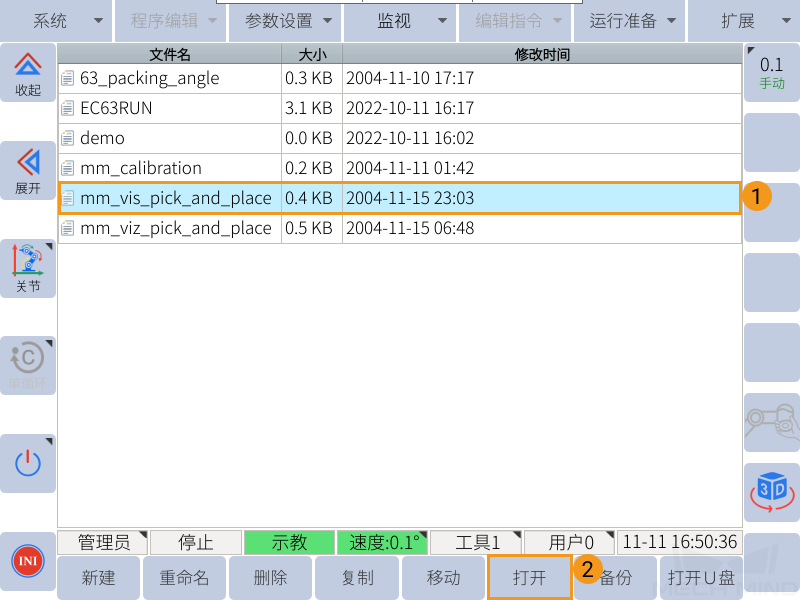
mm_vis_pick_and_place
该示例程序触发 Mech-Vision 拍照,并移动机器人至抓取点。
|
请确保 Lua 脚本程序一直在后台运行,否则无法与机器人建立通信。 |
程序流程介绍
NOP
WAIT B099 = 0
SET B105 1
//set project id
// SET B108 1
// //recipe id
// SET B099 3
// //set recipe
// WAIT B099 = 0
SET B106 0
//run vision expect num of pose
SET B107 2
//run vision pose type
SET B099 1
//start vision
WAIT B099 = 0
SET B099 2
//receive from vision
WAIT B099 = 0
SET B099 8
//set pose to v101-v120
WAIT B099 = 0
// MOVL V101 V=100MM/S CR=0.000MM
END-
第 3 行:设置工程号为 1 的 Mech-Vision 工程为需要触发的工程。
-
第 5 行:如需设置 Mech-Vision 工程配方,可以在此处指定工程配方编号。
-
第 7 行:可根据需要切换至指定的 Mech-Vision 工程配方。
-
第 10 行:获取 Mech-Vision 发送的全部视觉点(上限为 20 个)。
-
第 12 行:指定发送给 Mech-Vision 的位姿类型为 TCP。
-
第 14 行:触发 Mech-Vision 工程运行。
-
第 17 行:获取视觉点。
-
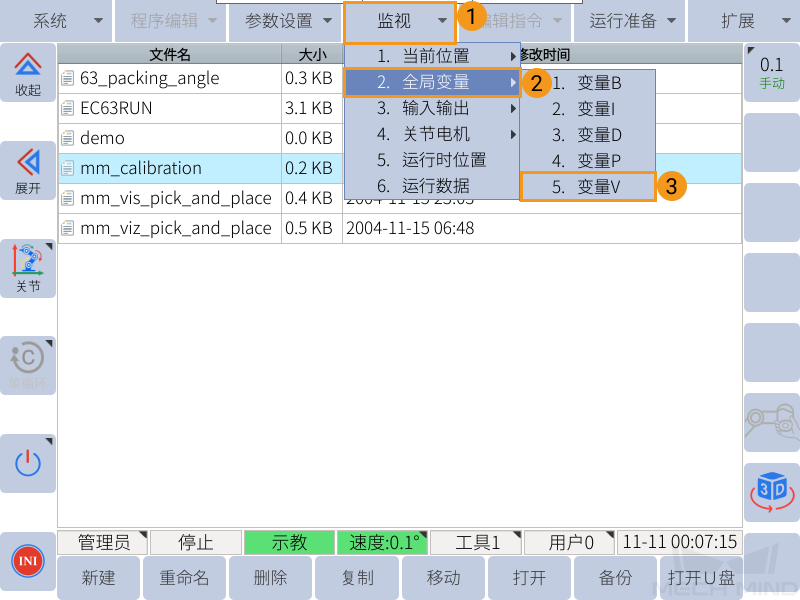
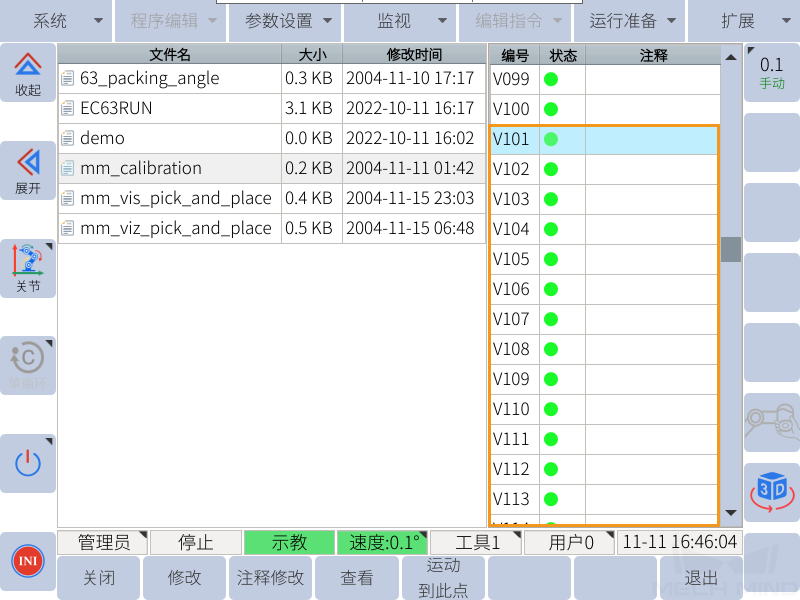
第 20 行:将从 Mech-Vision 收到的视觉点保存在 V101-V120 变量中。
-
第 23 行:可添加移动指令引导机器人移动到视觉点。