정렬 파라미터 그룹
이 부분에서는 "정렬 파라미터 그룹"을 사용하는 방법을 소개합니다.
응용 시나리오
획득한 모든 이미지에서 물체의 위치가 정확히 동일하도록 보장하는 것은 어렵습니다. 다음과 같은 문제가 발생할 수 있습니다.
-
물체 이동 : 대상 물체가 X, Y 또는 Z축을 따라 이동합니다.
-
물체 회전 : 대상 물체가 Z축을 중심으로 회전합니다.
다음 두 가지 방법을 사용하여 측정의 일관성을 유지할 수 있습니다.
-
입력 데이터 정렬
이미지 또는 데이터의 정렬 문제를 해결하기 위해, 대상 물체의 전형적인 특징을 추출해 매칭 모델을 생성하고, 이를 통해 물체의 위치를 교정할 수 있습니다. 물체 위치가 어떻게 변하더라도 정렬 후에는 항상 동일한 위치를 유지하여 이후 측정에 영향을 주지 않습니다.
-
특징 영역 변환
일반적으로 특징 영역은 대상 물체의 위치에 따라 자동으로 조정되지 않습니다. 물체가 이동하면 특징 영역도 수동으로 조정해야 하며, 이는 반복적이고 번거로운 작업이 될 수 있습니다. 이 문제는 물체의 이동 및 회전 정보를 활용해 특징 영역이 함께 이동·회전하도록 설정하면 해결할 수 있습니다. 이렇게 하면 물체 위치가 바뀌어도 항상 정확한 영역을 포함해 측정 일관성을 유지할 수 있습니다.
물체 위치 변화에 대한 데이터 집합을 정렬 파라미터 그룹(Alignment Parameter Group) 이라고 합니다. 간단히 말해, 정렬 파라미터 그룹은 대상 물체의 위치가 바뀌어도 특징 영역이 자동으로 따라 움직이도록 하여 측정의 일관성을 유지하는 역할을 합니다.
| 정렬 파라미터 그룹은 일반적으로 스텝에서 특징 영역이 사용될 때만 유효하며, 해당 영역의 위치를 조정하는 데 활용됩니다. 현재 유일한 예외는 표면 트랙 측정 스텝으로, 정렬 파라미터 그룹을 사용하여 트랙라인의 위치를 조정할 수 있습니다. |
정렬 파라미터 그룹을 획득하는 방법은?
다음 방법을 통해 정렬 파라미터 그룹을 얻을 수 있습니다.
-
"정렬 파라미터 그룹 추출" 스텝 사용(일반적으로 사용됨)
"정렬 파라미터 그룹 추출" 스텝 사용
정렬 파라미터 그룹 추출 스텝을 사용하여 정렬 파라미터 그룹을 직접 생성할 수 있습니다.
| 정렬 파라미터 그룹의 목적은 물체 위치 변화에 따라 특징 영역이 자동으로 조정되도록 하는 것입니다. 따라서 정렬 파라미터 그룹을 생성할 때는, 파라미터가 특징 영역을 정확히 변환할 수 있는지 확인해야 합니다. |
- 예시
-
커넥터 PIN의 표면 데이터를 추출한 후, 각 PIN의 중심점을 기준으로 정렬 파라미터 그룹을 생성하여 데이터 범위를 정밀하게 제한할 수 있습니다. 이후, 표면 사전 처리 스텝을 통해 표면 데이터를 잘라낼 때, PIN의 표면에 대한 특징 영역을 설정하고 특징 영역과 중심점 간의 대응 관계를 설정하면, 다른 PIN에 대해서도 특징 영역이 자동으로 조정됩니다.
PIN 위치가 변경되면, 핀 상단의 중심점이 결정되는 즉시 초기 튜닝 과정에서 설정된 기준에 따라 특징 영역이 자동으로 조정됩니다.
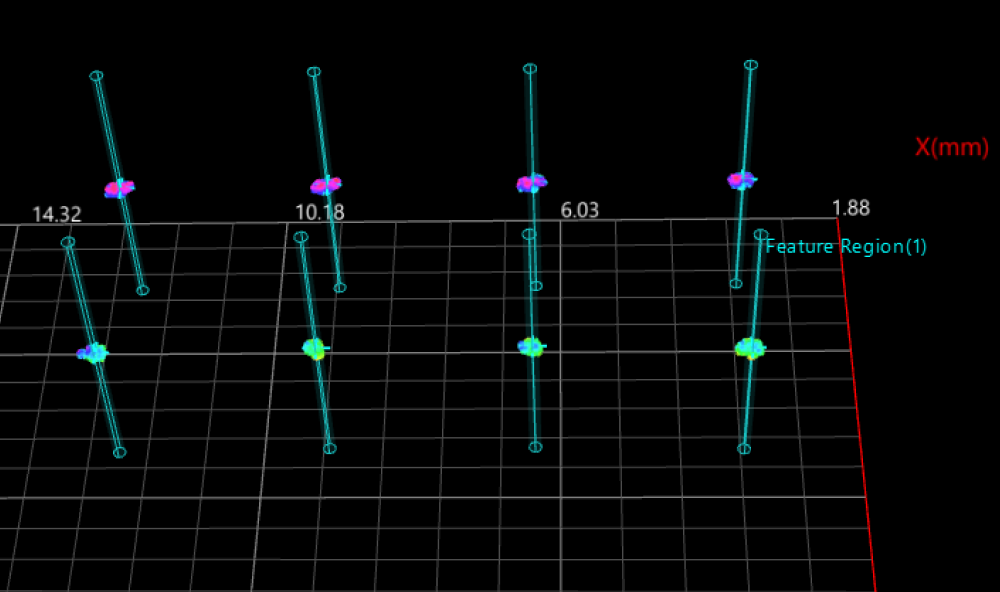
① PIN 상단 데이터 추출
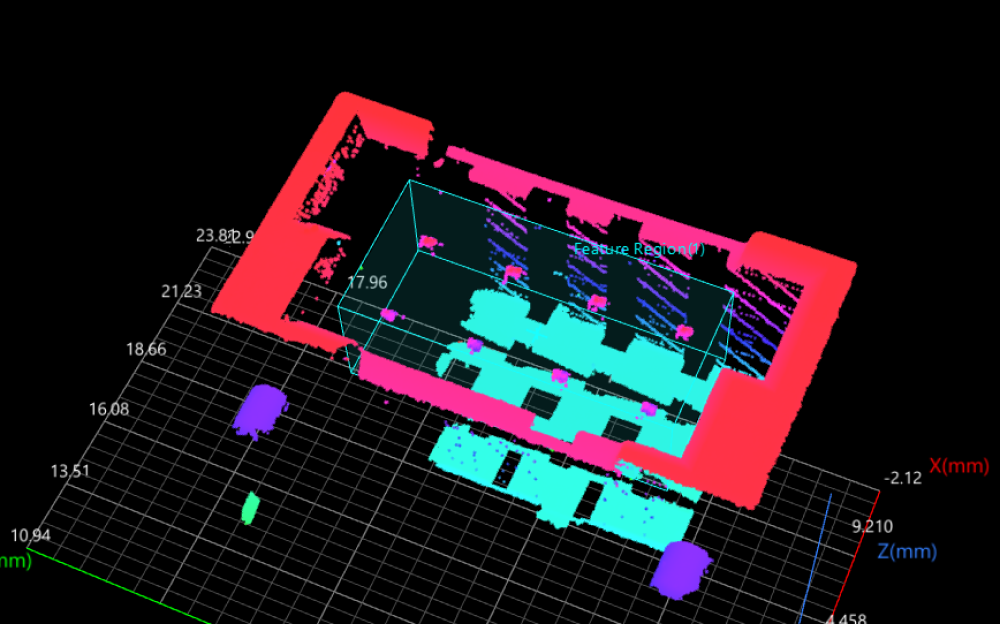
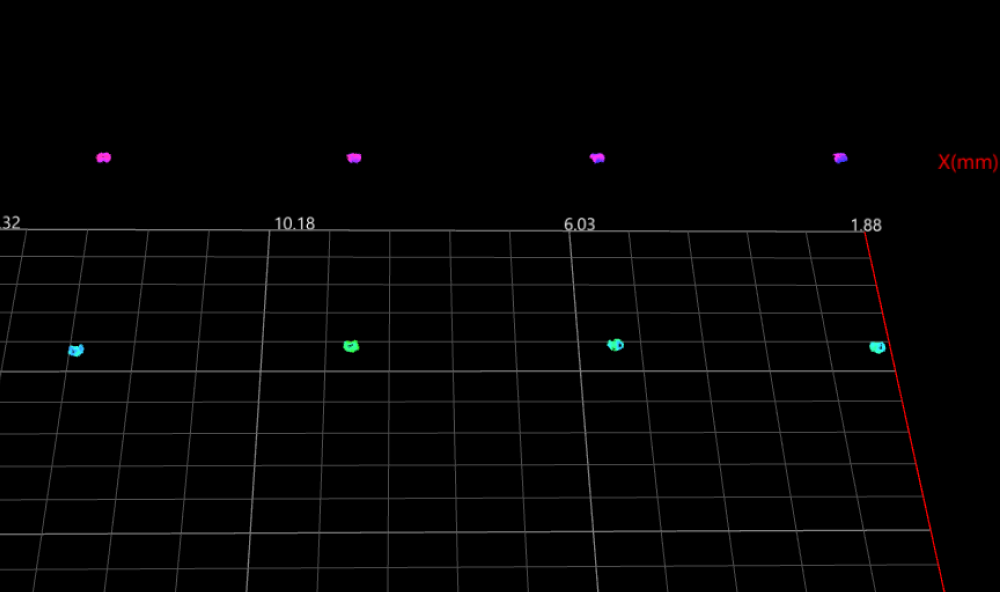
② PIN 상단 중심점 획득
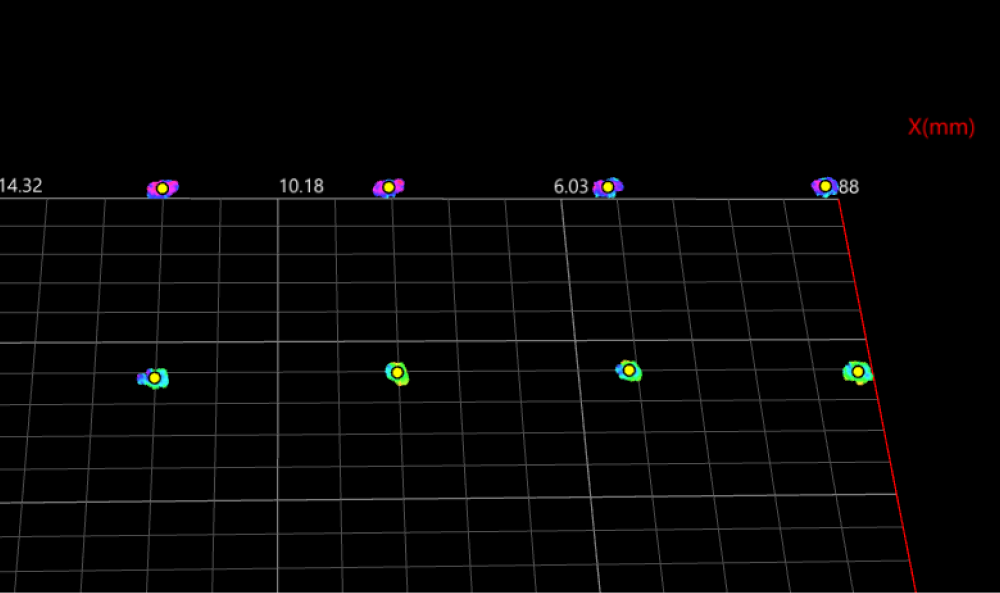
③ 정렬 파라미터 그룹 생성
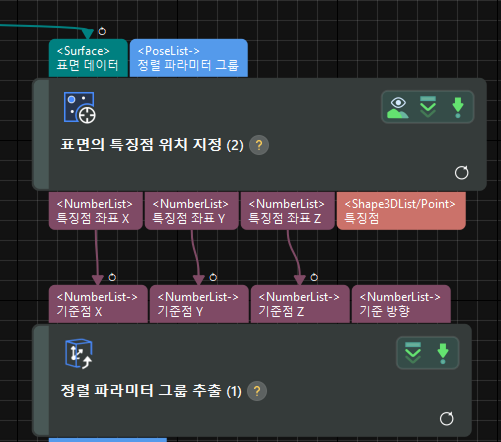
④ 특징 영역 조정
⑤ 데이터 범위 좁히기
"매칭/정렬" 스텝 사용
다음 스텝은 모두 생성된 매칭 모델을 바탕으로 대상 물체의 이동 및 회전을 계산하고 정렬 파라미터 그룹을 출력할 수 있습니다:
| 스텝 | 데이터 유형 | 출력 |
|---|---|---|
표면 데이터 |
정렬된 표면 데이터 및 정렬 파라미터 그룹. |
|
표면 데이터 |
매칭 결과 및 정렬 파라미터 그룹. |
|
2D 이미지 |
정렬된 이미지 및 정렬 파라미터 그룹. |
|
2D 이미지 |
매칭 결과 및 정렬 파라미터 그룹. |
이 스텝들이 출력하는 정렬 파라미터 그룹은 특징 영역을 사용하는 이후 스텝에 입력하여 특징 영역을 회전하거나 이동시키는 데 사용할 수 있습니다.
|
- 예시
-
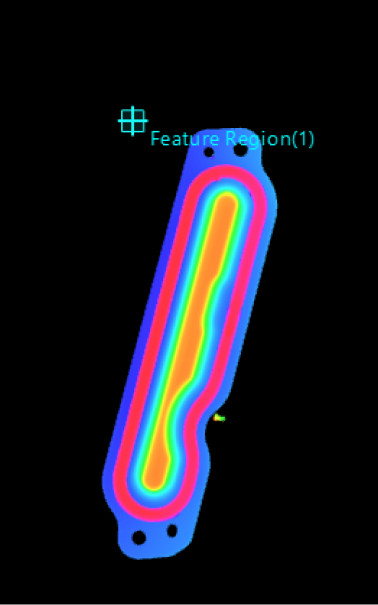
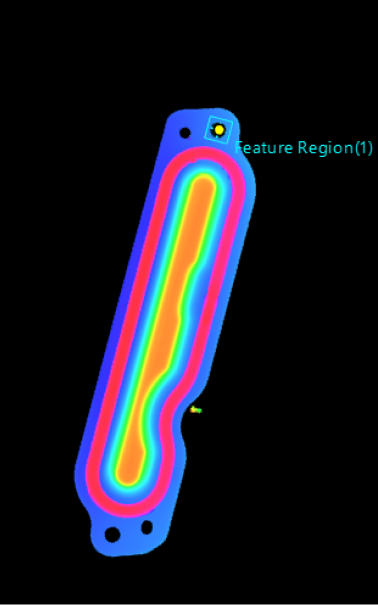
이미지에서 대상 물체의 위치가 변경되면, 정렬 파라미터 그룹을 활용해 특징 영역도 함께 이동시킬 수 있습니다: (이하 예시는 3D 시나리오를 기반으로 하며, 2D 시나리오도 동일한 원리입니다.)
변화 유형 예시 정렬 파라미터 그룹 사용 안 함 정렬 파라미터 그룹 사용함 평행 이동
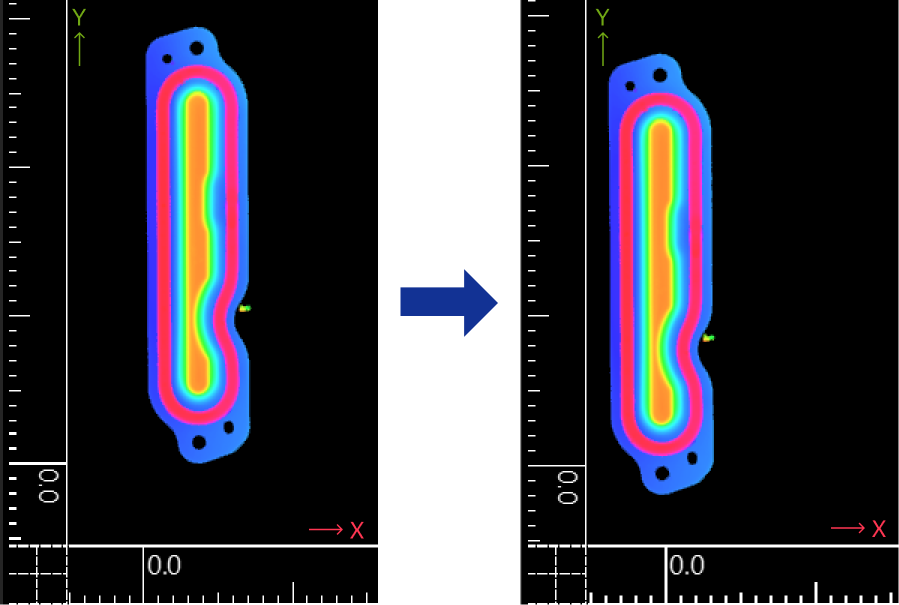
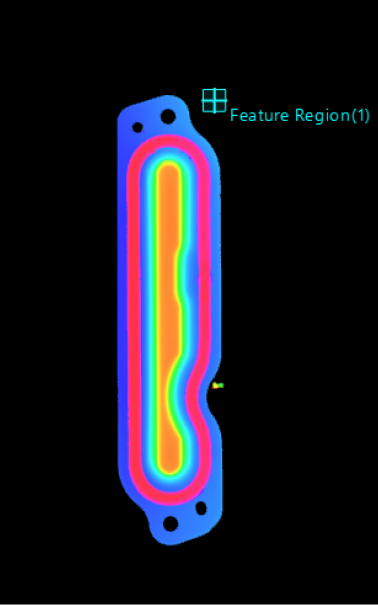
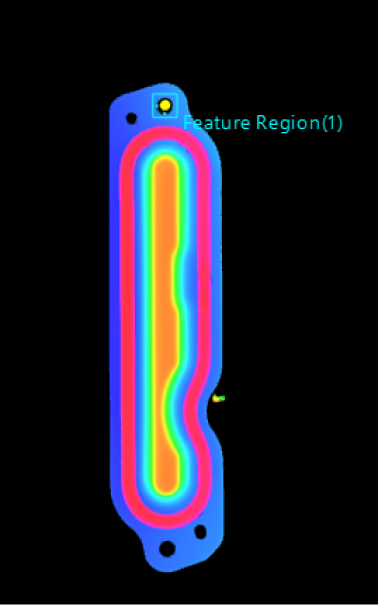
회전