TCP 표준 인터페이스 명령어
이 섹션에서는 온라인 측정 시스템에서 지원하는 TCP 표준 인터페이스 명령어를 소개합니다. TCP 표준 인터페이스 명령어는 로봇과 온라인 측정 시스템 간의 TCP 프로토콜 통신을 구현하는 데 사용됩니다.
명령어 개요
| 명령어 이름 | 호출 순서 | 필수 호출 여부 | 설명 |
|---|---|---|---|
- |
아니오 |
Mech-Metrics에서 프로젝트를 전환하는 데 사용됩니다. |
|
① |
예 |
로봇 또는 외부 장치를 사용하여 Mech-Metrics에 새 대상 물체 측정 시작을 알리고, 대상 물체 이름, 대상 물체 SN 및 기타 대상 물체 정보를 Mech-Metrics에 전송합니다. |
|
② |
예 |
해당 측정 특징의 Mech-MSR 프로젝트 실행을 트리거합니다. 여러 번 측정해야 하는 경우, 이 명령어를 여러 번 호출할 수 있습니다. |
|
④ |
예 |
로봇 또는 외부 장치를 사용하여 Mech-Metrics에 측정 종료를 알리고, 대상 물체 측정 결과를 조회합니다. |
|
③ |
아니오 |
일부 시나리오에서는 측정 시작 시 대상 물체 SN을 가져올 수 없습니다. 예를 들어 측정 중 스캔하여 가져와야 하는 경우가 있습니다. 이 명령어는 대상 물체 측정 중 대상 물체 SN을 전달하는 데 사용됩니다. |
|
⑥ |
아니오 |
대상 물체 SN을 전달하여 Mech-Metrics 소프트웨어 기본 화면을 해당 대상 물체의 데이터 보기로 전환합니다. |
|
- |
예 |
로봇 캘리브레이션 프로세스 제어 및 상태 조회에 사용됩니다. 명령어 호출 시 캘리브레이션 상태 파라미터를 전달하여 캘리브레이션을 다시 시작하거나 캘리브레이션 포인트를 추가합니다. 현재 캘리브레이션 상태, 다음 캘리브레이션 포인트의 플랜지 포즈 및 관절 각도 정보를 반환합니다. |
|
온라인 측정 시스템에서 지원하는 명령어 전송 방식은 아래 그림과 같습니다: 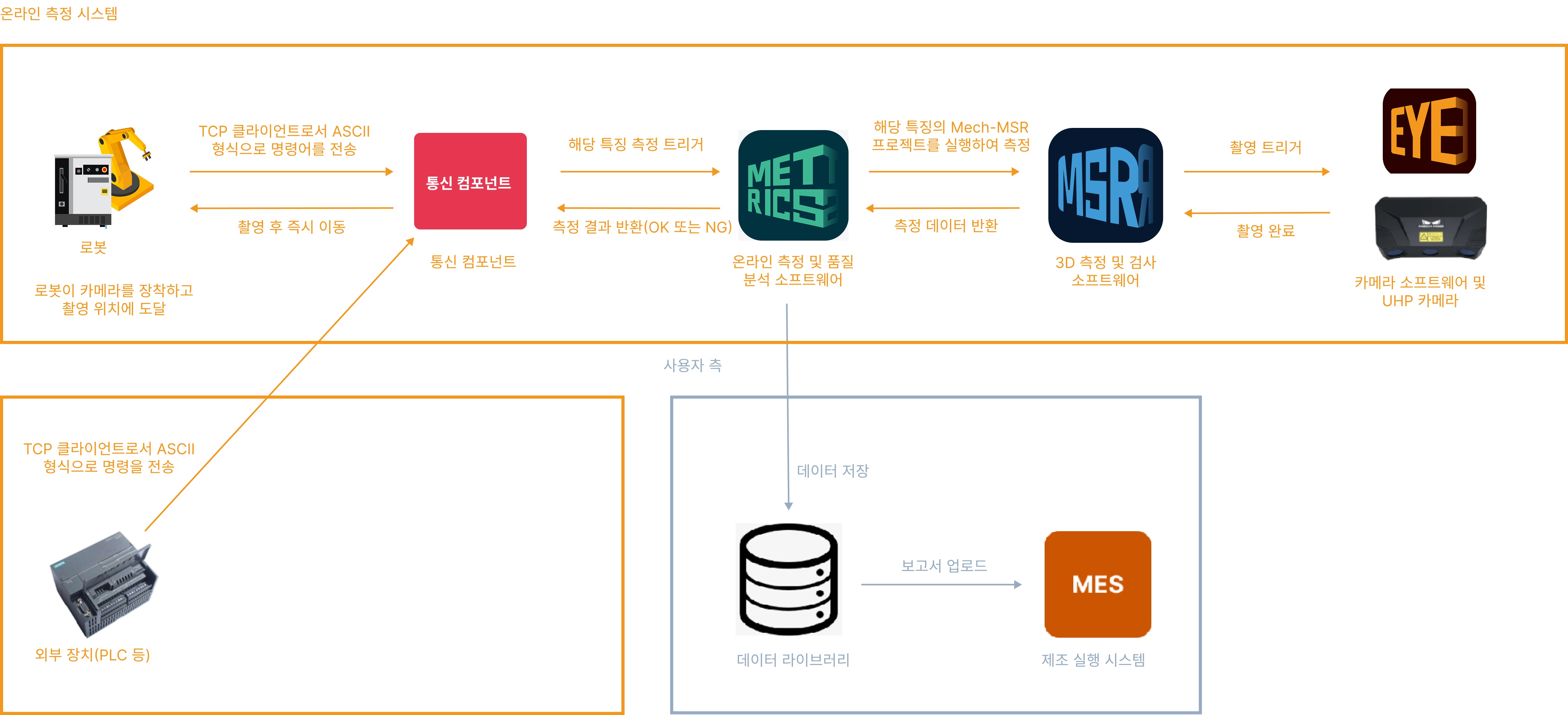
설명은 다음과 같습니다:
|
통신 명령어
800 명령어 —— 프로젝트 전환하기
명령어 전송
송신 측
로봇 또는 외부 장치(예: PLC 등)
수신 측
Mech-Metrics
전송 시점
프로젝트 전환 시작 전.
명령어 기능
로봇 또는 외부 장치가 Mech-Metrics에 프로젝트 전환 시작을 알립니다.
명령어 형식
800, 대상 물체 번호, 프로젝트 번호명령어 예시
800,1,1명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다.
|
프로젝트 ID |
예 |
이 파라미터는 전환할 프로젝트의 번호를 지정합니다. 지정한 프로젝트 번호는 프로젝트 전환 규칙을 통해 이미 구성되어 있어야 합니다.
|
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇 또는 외부 장치(예: PLC 등)
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
Mech-Metrics는 로봇에 새 프로젝트 전환 명령어를 수신했음을 알리고, 새 프로젝트 전환을 시작하며, 이번 전환이 성공했는지 여부를 로봇에 알립니다.
명령어 형식
800, 상태 코드명령어 예시
800,8105명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8105*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
801 명령어 —— 측정 작업 시작하기
명령어 전송
송신 측
로봇 또는 외부 장치(예: PLC 등)
수신 측
Mech-Metrics
전송 시점
새 대상 물체 측정 시작 시.
명령어 기능
로봇 또는 외부 장치가 Mech-Metrics에 새 대상 물체 측정을 알립니다.
명령어 형식
801, 대상 물체 번호, 대상 물체 이름, 대상 물체 SN, 품질 검사 모드, 사용자 정의 1, 사용자 정의 2, 사용자 정의 3, 사용자 정의 4, 사용자 정의 5, 사용자 정의 6, 사용자 정의 7, 사용자 정의 8명령어 예시
801,1,part01,sn001,2,1,2,3,4,5,6명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다. 위 예시에서 첫 번째 *1*은 대상 물체 번호입니다. |
대상 물체 이름 |
예 |
이 파라미터는 측정할 대상 물체의 이름을 지정합니다. 대상 물체 이름은 문자와 숫자를 포함할 수 있으며, 길이는 20자를 초과할 수 없습니다. 위 예시에서 *part01*은 대상 물체 이름입니다. |
대상 물체 SN |
예 |
이 파라미터는 대상 물체 SN을 지정합니다. 대상 물체 SN은 대상 물체 시리얼 넘버라고도 하며, 해당 대상 물체의 고유 식별자입니다. 대상 물체 SN은 문자와 숫자를 포함할 수 있으며, 길이는 30자를 초과할 수 없습니다. 위 예시에서 *sn001*은 대상 물체 SN입니다. 이 파라미터는 필수 파라미터입니다. 일부 시나리오에서는 측정 시작 시 대상 물체 SN을 가져올 수 없습니다. 예를 들어 측정 중 스캔하여 가져와야 하는 경우, 이 파라미터는 비워 둘 수 있지만 해당 파라미터 위치는 예약해야 합니다. 예시: 801, 1, part01, , 1, 2, 3, 4, 5, 6. 이 예시에서는 대상 물체 SN을 입력하지 않았지만, 해당 파라미터 위치는 쉼표(,)로 예약되어 있습니다. |
품질 검사 모드 |
예 |
이 파라미터는 대상 물체의 품질 검사 모드를 지정합니다. 1: 전수 검사, 즉 대상 물체의 전체 치수를 검사합니다. 2: 부분 검사, 즉 대상 물체의 주요 치수를 검사합니다. 0: 현재 구성을 사용합니다. 위 예시에서 첫 번째 *2*는 품질 검사 모드가 부분 검사임을 나타냅니다. |
사용자 정의 1-8 |
아니오 |
이 파라미터는 선택 파라미터이며, 대상 물체의 사용자 정의 정보를 제공하는 데 사용됩니다. 사용자 정의 파라미터는 Mech-Metrics에 더 많은 대상 물체 정보를 제공해야 할 때만 사용합니다. 이 명령어는 최대 8개의 사용자 정의 파라미터를 지원하며, 각 사용자 정의 파라미터의 값은 1~8 사이의 정수입니다. 사용자 정의 파라미터를 사용해야 하는 경우:
위 예시에서 *1,2,3,4,5,6*은 사용자 정의 파라미터이며, 이미 Mech-Metrics 소프트웨어에서 해당 파라미터 값의 의미가 구성되어 있습니다. |
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇 또는 외부 장치(예: PLC 등)
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
Mech-Metrics는 로봇에 새 대상 물체 측정 시작 명령어를 수신했음을 알리고, 새 대상 물체 이력 데이터 항목 생성을 시작하며, 이번 실행이 연속 실행인지 단일 실행인지 로봇에 알립니다.
명령어 형식
801, 상태 코드, 연속 실행/단일 실행명령어 예시
801,8100,1명령어 파라미터 설명
| 파라미터 | 설명 | ||||
|---|---|---|---|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8100*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
||||
연속 실행/단일 실행 |
이 파라미터는 이번 실행이 연속 실행인지 단일 실행인지를 나타냅니다.
위 예시에서 *1*은 연속 실행을 나타냅니다.
|
802 명령어 —— 특징 측정 실행하기
명령어 전송
송신 측
로봇 또는 외부 장치(예: PLC 등)
수신 측
Mech-Metrics
전송 시점
로봇이 측정 특징 촬영 위치에 도달했습니다.
명령어 기능
해당 측정 특징의 Mech-MSR 프로젝트 실행을 트리거합니다.
명령어 형식
802, 대상 물체 번호, 측정 특징 번호, 로봇 관절 각도, 로봇 플랜지 포즈명령어 예시
802,1,1,10,20,30,40,50,60,100,200,300,0,180,0명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 | ||
|---|---|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다. 위 예시에서 첫 번째 *1*은 대상 물체 번호입니다. |
||
측정 특징 번호 |
예 |
이 파라미터는 측정할 특징의 번호를 지정합니다. 특징 번호는 해당 특징의 고유 식별자입니다. 번호는 1~999 사이의 정수입니다.
위 예시에서 두 번째 *1*은 측정 특징 번호입니다. |
||
로봇 관절 각도 |
예 |
이 파라미터는 로봇 관절 각도 데이터를 지정합니다. 일반적으로 로봇의 여섯 개 관절 각도 데이터(J1-J6)입니다. 단위는 도(deg)입니다. 위 예시에서 *10,20,30,40,50,60*은 로봇의 관절 각도 데이터입니다. |
||
로봇 플랜지 포즈 |
예 |
이 파라미터는 로봇 플랜지 포즈를 지정합니다. 일반적으로 6차원 데이터이며, 세 개의 위치 데이터와 세 개의 자세 데이터를 포함합니다. 위치 데이터의 단위는 밀리미터입니다. 자세 데이터는 오일러 각도로 표시되며, 단위는 도입니다. 위 예시에서 *100,200,300,0,180,0*은 로봇 플랜지 포즈이며, 여기서 *100,200,300*은 위치 데이터이고, *0,180,0*은 자세 데이터입니다. |
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇 또는 외부 장치(예: PLC 등)
전송 시점
Mech-Metrics가 카메라 촬영이 완료되었다는 신호를 수신합니다.
명령어 기능
카메라 촬영이 완료되었음을 로봇에 알리고, 로봇이 다음 측정 위치로 이동하도록 합니다.
명령어 형식
802, 상태 코드명령어 예시
802,8101명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8101*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
803 명령어 —— 측정 작업 종료하기
명령어 전송
송신 측
로봇 또는 외부 장치(예: PLC 등)
수신 측
Mech-Metrics
전송 시점
마지막 측정 특징의 촬영이 완료되어 대상 물체 측정이 완료되었습니다.
명령어 기능
로봇 또는 외부 장치를 사용하여 Mech-Metrics에 측정 종료를 알리고, 대상 물체 측정 결과를 조회합니다.
명령어 형식
803,대상 물체 번호명령어 예시
803,1명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다. 위 예시에서 *1*은 대상 물체 번호입니다. |
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
측정 결과를 반환합니다.
명령어 형식
803, 상태 코드, 결정 결과, 대상 물체 상태 1, 대상 물체 상태 2, 대상 물체 상태 3명령어 예시
803,8102,0,0,0,0명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8102*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
대상 물체 판정 |
이 파라미터는 대상 물체 판정 결과를 나타냅니다.
위 예시에서 첫 번째 *0*은 대상 물체가 합격했음을 나타냅니다. |
대상 물체 상태 1-3 |
이 파라미터들은 1급 공차대, 2급 공차대, 3급 공차대를 초과한 측정 항목 수를 나타냅니다.
위 예시에서 마지막 세 개의 *0*은 공차대가 설정되어 있지 않거나 해당 공차대를 초과한 측정 항목이 없음을 나타냅니다. |
804 명령어 —— 측정 중 대상 물체 SN 전달
명령어 전송
송신 측
로봇 또는 외부 장치(PLC 등)
|
로봇과 외부 장치는 각각 어떤 상황에서 804 명령어를 전송합니까?
|
수신 측
Mech-Metrics
전송 시점
대상 물체 측정 과정 중 임의의 시점.
명령어 기능
일부 시나리오에서는 대상 물체 번호(대상 물체 SN 또는 대상 물체 ID라고도 함)를 측정 시작 시 가져올 수 없습니다. 예를 들어 측정 과정 중 스캔하여 가져와야 하는 경우가 있습니다. 이 명령어는 대상 물체 측정 중 대상 물체 SN을 전달하는 데 사용됩니다.
명령어 형식
804, 대상 물체 번호, 대상 물체 SN명령어 예시
804,1,sn001명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다. 위 예시에서 *1*은 대상 물체 번호입니다. |
대상 물체 SN |
예 |
이 파라미터는 대상 물체 SN을 지정합니다. 대상 물체 SN은 대상 물체 시리얼 넘버라고도 하며, 해당 대상 물체의 고유 식별자입니다. 대상 물체 SN은 문자와 숫자를 포함할 수 있으며, 길이는 30자를 초과할 수 없습니다. 위 예시에서 *sn001*은 대상 물체 SN입니다. |
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇 또는 외부 장치(PLC 등)
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
로봇에 대상 물체 SN 전달이 성공했음을 알립니다.
명령어 형식
804, 상태 코드명령어 예시
804,8103명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8103*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
805 명령어 —— 대상 물체 이력 데이터 조회하기
명령어 전송
송신 측
로봇 또는 외부 장치(PLC 등)
|
로봇과 외부 장치는 각각 어떤 상황에서 805 명령어를 전송합니까?
|
수신 측
Mech-Metrics
전송 시점
비측정 중의 임의의 시점.
명령어 기능
외부에서 *대상 물체 SN*을 전달하여 Mech-Metrics 소프트웨어 기본 화면을 전달된 번호의 대상 물체로 전환합니다.
명령어 형식
805, 대상 물체 번호, 대상 물체 SN명령어 예시
805,1,sn001명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
대상 물체 번호 |
예 |
이 파라미터는 대상 물체 유형의 고유 식별자를 지정합니다. 대상 물체 번호는 1~99 사이의 정수입니다. 지정한 대상 물체 번호는 대상 물체 번호 구성 화면에서 이미 구성되어 있어야 합니다. 위 예시에서 *1*은 대상 물체 번호입니다. |
대상 물체 SN |
예 |
이 파라미터는 대상 물체 SN을 지정합니다. 대상 물체 SN은 대상 물체 시리얼 넘버라고도 하며, 해당 대상 물체의 고유 식별자입니다. 대상 물체 SN은 문자와 숫자를 포함할 수 있으며, 길이는 30자를 초과할 수 없습니다. 위 예시에서 *sn001*은 대상 물체 SN입니다. |
반환 명령어
송신 측
Mech-Metrics
수신 측
로봇 또는 외부 장치(PLC 등)
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
대상 물체 SN 전달이 성공했음을 알립니다.
명령어 형식
805, 상태 코드명령어 예시
805,8104명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
위 예시에서 Mech-Metrics가 반환한 상태 코드는 *8104*이며, 명령어가 성공적으로 실행되었음을 나타냅니다. |
701 명령어 —— 캘리브레이션
명령어 전송
송신 측
로봇
수신 측
Mech-MSR
전송 시점
로봇 핸드-아이 캘리브레이션을 수행해야 할 때.
명령어 기능
로봇이 Mech-MSR에 핸드-아이 캘리브레이션 시작을 알립니다. 이 명령어는 Mech-MSR 카메라 메뉴 바에 있는 3D 카메라 캘리브레이션 도구와 함께 사용해야 합니다.
명령어 형식
701, 캘리브레이션 상태, 로봇 플랜지 포즈, 로봇 관절 각도명령어 예시
701,0,100,200,300,0,180,0,10,20,30,40,50,60명령어 파라미터 설명
| 파라미터 | 필수 여부 | 설명 |
|---|---|---|
캘리브레이션 상태 |
예 |
이 파라미터는 현재 캘리브레이션 상태를 지정합니다.
|
플랜지 포즈 |
예 |
로봇의 현재 플랜지 포즈입니다. 일반적으로 6차원 데이터이며, 세 개의 위치 데이터와 세 개의 자세 데이터를 포함합니다. 위치 데이터의 단위는 밀리미터입니다. 자세 데이터는 오일러 각도로 표시되며, 단위는 도입니다.
|
관절 각도 |
예 |
이 파라미터는 로봇 관절 각도 데이터를 지정합니다. 일반적으로 로봇의 여섯 개 관절 각도 데이터(J1-J6)입니다. 단위는 도(deg)입니다.
|
반환 명령어
송신 측
Mech-MSR
수신 측
로봇
전송 시점
전송된 명령어를 수신했습니다.
명령어 기능
Mech-MSR는 로봇에 재캘리브레이션 또는 캘리브레이션 포인트 추가 명령어를 수신했음을 알리고, 명령어 실행을 시작하며, 이번 실행이 성공했는지 여부를 로봇에 알립니다.
명령어 형식
701, 상태 코드, 캘리브레이션 상태, 다음 캘리브레이션 포인트의 플랜지 포즈, 다음 캘리브레이션 포인트의 관절 각도명령어 예시
701,7100,0,100,200,300,0,180,0,10,20,30,40,50,60명령어 파라미터 설명
| 파라미터 | 설명 |
|---|---|
상태 코드 |
이 파라미터는 명령어 실행 결과의 상태 코드를 나타냅니다.
|
캘리브레이션 상태 |
이 파라미터는 캘리브레이션 명령어의 실행 상태를 나타냅니다.
|
다음 캘리브레이션 포인트의 플랜지 포즈 |
로봇이 이동해야 하는 다음 캘리브레이션 포인트의 플랜지 포즈입니다.
|
다음 캘리브레이션 포인트의 관절 각도 |
로봇이 이동해야 하는 다음 캘리브레이션 포인트의 관절 각도입니다.
|