통신 방식 소개
온라인 측정 시스템 하드웨어 구축이 완료된 후, 사용자는 Mech-Mind 라인 측정 시스템과 외부 장치(로봇, PLC 또는 호스트 컴퓨터 등) 간의 통신 방식을 고려하여 두 장치 간의 데이터 상호작용을 설정하고 제어해야 합니다.
Mech-Mind온라인 측정 시스템은 표준 인터페이스 통신 방식을 사용하여 외부 장치와 통신할 수 있습니다.
표준 인터페이스 통신
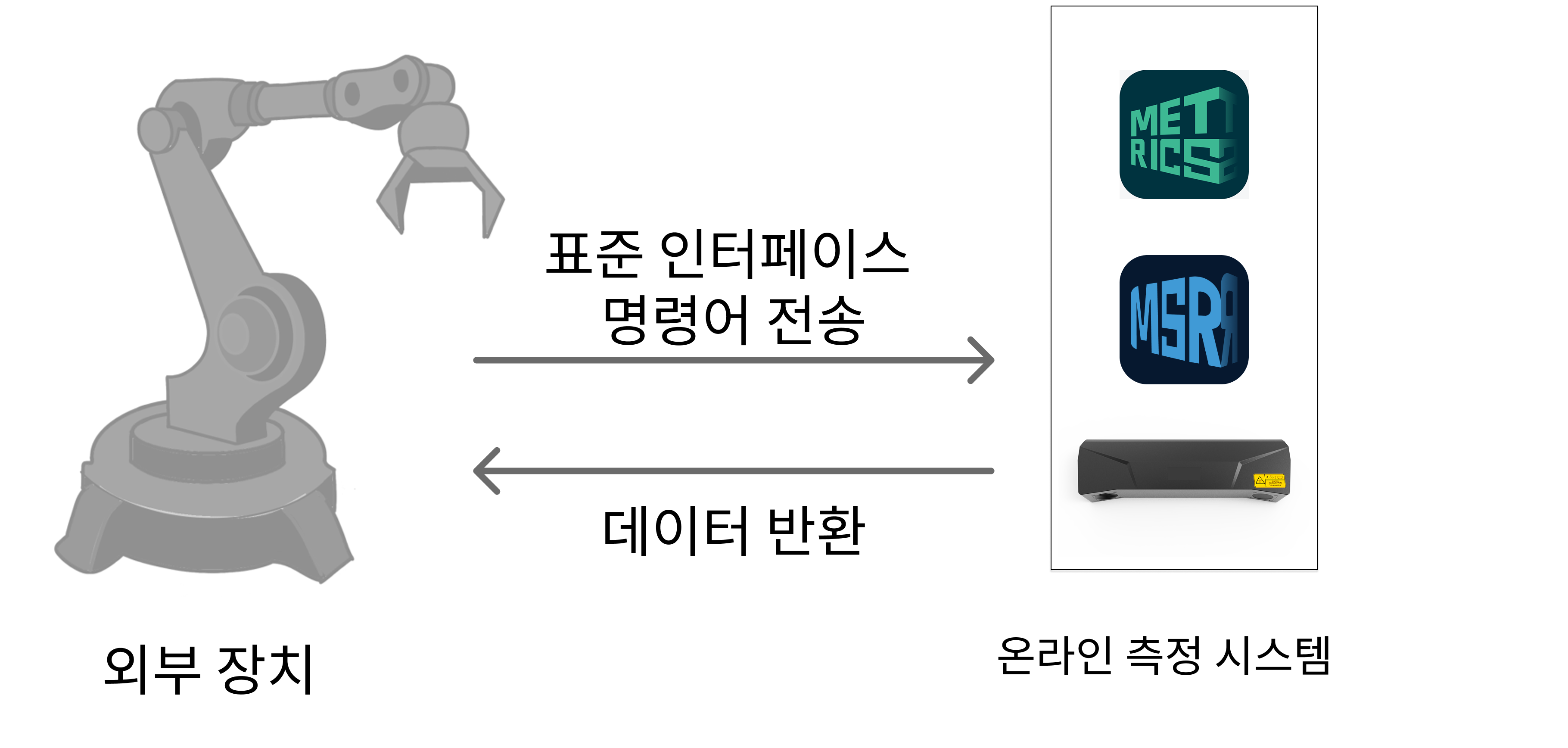
표준 인터페이스 통신 방식은 온라인 측정 시스템이 외부 장치(예: 로봇, PLC 또는 호스트 컴퓨터)와 통신할 때, 외부 장치가 온라인 측정 시스템에 표준 인터페이스 명령어를 전송하고, 시스템이 명령어를 수신한 후 해당 데이터를 반환하는 방식을 의미합니다(아래 그림 참조). 이 통신 방식에서는 온라인 측정 시스템이 외부 장치를 능동적으로 제어하지 않고, 외부 장치의 명령어에 따라 수동적으로 데이터를 반환합니다. 따라서 사용자는 표준 인터페이스 프로그램을 외부 장치에 로드하고, 외부 장치 측에서 프로그램을 작성하여 온라인 측정 시스템과의 통신 및 데이터 상호작용을 구현해야 합니다.
표준 인터페이스 통신 방식에 대한 자세한 내용은 표준 인터페이스 통신 사용 프로세스를 참조하십시오.
표준 인터페이스 명령어
표준 인터페이스 명령어는 Mech-Mind가 표준 통신 프로토콜을 기반으로 온라인 측정 시스템용으로 개발한 명령어 세트로, 명령어 요청 및 응답 데이터 형식을 정의합니다. 표준 인터페이스 명령어에 대한 자세한 설명은 표준 인터페이스 지침 설명을 참조하십시오.
표준 인터페이스 명령어는 로봇 측에서 직접 사용할 수 없으며, 로봇은 전용 로봇 명령어만 호출할 수 있습니다. 따라서 Mech-Mind는 적용된 로봇 브랜드에 맞춰 표준 인터페이스 명령어를 로봇이 직접 호출할 수 있는 로봇 표준 인터페이스 명령어로 패키징합니다. 표준 인터페이스 프로그램을 로봇에 로드한 후, 이러한 명령어를 로봇 프로그램에서 직접 사용할 수 있습니다.
-
Mech-Mind 온라인 측정 시스템이 해당 외부 장치에 이미 적용되어 있는 경우, 사용자는 로봇 표준 인터페이스 명령어를 직접 사용할 수 있습니다. 상세한 설명은 표준 인터페이스 통신 내용을 참조하십시오.
-
Mech-Mind 온라인 측정 시스템이 해당 외부 장치에 아직 적용되어 있지 않은 경우, 사용자는 <표준 인터페이스 개발자 매뉴얼>에 따라 해당 로봇 표준 인터페이스 명령어를 작성해야 표준 인터페이스 통신을 구현할 수 있습니다.