入門ガイド:サブフレームのインライン測定
本チュートリアルは、インライン測定システムを初めて使用するユーザーを対象としており、すぐに使い始められる学習パスを提供します。
サブフレームのサンプルプロジェクトの取得と認識、ローカルシミュレーション検証、プロジェクト構造と主要な測定プロセスの理解、そして最初の基礎的編集演習を順次完了します。
位置づけと学習目標
このチュートリアルは「クイックスタート」に焦点を当てており、パラメータの詳細や完全な展開プロセスについては説明しません。
- 所要時間の目安
-
45~60分
- 完了後に習得できること
-
-
サブフレームのサンプルプロジェクトにおける主要リソースをダウンロードして認識できます。
-
ローカルシミュレーションを完了し、測定結果を確認できます。
-
サブフレームのサンプルプロジェクトにおける Mech-MSR と Mech-Metrics の役割分担を理解できます。
-
サンプルプロジェクトを基に、最小限の編集演習を完了します。
-
前提条件と準備リスト
開始する前に、以下の条件を満たしていることを確認してください。
-
Mech-Metrics と Mech-MSR がインストールされており、正常に起動できること。インストールされていない場合は、まずインストールガイドを参照してソフトウェアのインストールを完了してください。
-
インライン測定ソリューションの基本構成について基礎的な理解があること。
背景情報を補足する必要がある場合は、まずインライン測定ソリューションをお読みください。
サンプルプロジェクトの取得
まず、サブフレームのサンプルプロジェクトの圧縮ファイルをダウンロードして解凍してください。
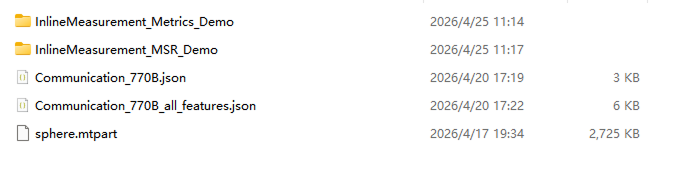
解凍後、以下の3種類のリソースが得られます。
-
InlineMeasurement_Metrics_Demo:Mech-Metrics プロジェクト。
-
InlineMeasurement_MSR_Demo:Mech-MSR ソリューション。Mech-MSR ソリューションフォルダには、すべての測定プロジェクトが含まれています。
-
Communication_770B.json、Communication_770B_all_features.json:通信シミュレーションツールの設定ファイル。
そのうち、2つの通信設定ファイルはそれぞれ異なるシーンに適しています。
-
Communication_770B.json:「サブフレーム770B」ワーク専用であり、単一ワークの検証および動的繰り返し精度テストに適しています。
-
Communication_770B_all_features.json:2つのワークを同時に操作でき、サンプルプロジェクト全体の構造を把握するのに適しています。
5分でサンプルを動作させる
-
Mech-Metrics および Mech-MSR のインストールディレクトリにあるMech-Metrics/binディレクトリを開き、通信シミュレーションツール「test_metrics_service.exe」を実行します。
-
通信シミュレーションツールで、を選択し、通信設定ファイルを読み込みます。
初回検証時は Communication_770B.json を優先して読み込むことを推奨します。2つのワークのフローを同時に体験したい場合は、Communication_770B_all_features.json を読み込んでください。

-
Mech-Metrics でサンプルプロジェクトを開き、インターフェースにサンプルワークリストが表示されていることを確認します。初回操作時は、検証のために「サブフレーム770B」に対応するワークを優先して選択することを推奨します。

-
Mech-MSR でサンプルソリューションを開き、インターフェースのプロジェクトリストにすべての特徴の測定プロジェクトが表示されていることを確認します。

-
通信シミュレーションツールにおいて、完全なフローに従って順次コマンドを送信します:最初に測定開始のコマンドを送信し、次に複数の特徴測定コマンド(測定開始と測定終了の間のコマンド)を順次送信し、最後に測定終了のコマンドを送信します。
特徴測定を開始する際、Mech-MSR ソフトウェアは仮想画像データを使用したプロジェクトの実行を許可するかどうかを尋ねるワーニングメッセージを表示します。ソフトウェア再起動前に再度表示しないにチェックを入れ、実行ボタンをクリックします。

-
Mech-Metrics サンプルプロジェクトの3Dビューエリアで測定結果が更新されたことを確認し、下部のログバーで測定プロセス全体のログを確認します。

このセクションを完了した後、少なくとも以下の結果を確認することを推奨します。
-
通信シミュレーションツールのコマンドが正常に送信され、明らかなエラーが発生していないこと。
-
Mech-Metrics で今回の実行によって生成された測定結果を確認でき、ログバーで完全な測定プロセスのログを確認できること。
-
連続実行時に、システムが安定して測定結果を生成できること。
上記のいずれかの結果が得られない場合は、コマンドの送信順序、現在のワークが正しく選択されているか、およびサンプルプロジェクトが完全に読み込まれているかを優先的に確認することを推奨します。
サブフレームインライン測定ソリューションの理解
以下の3つの側面からサブフレームのインライン測定ソリューションを理解することを推奨します。
-
測定項目:サブフレームの主要特徴の寸法と幾何学的品質。
-
測定方法:Mech-MSR によって画像処理と特徴抽出を完了し、Mech-Metrics によってワーク、特徴、番号、判定、および結果の管理を完了します。
-
確認事項:特徴が正しく認識されているか、結果が安定して出力されているか、出力項目が Mech-Metrics に正しく受信されているかに重点を置きます。
10分で Mech-Metrics サンプルプロジェクトを理解する
このサンプルプロジェクトでは、Mech-Metrics における以下の2つのワークを優先的に理解することを推奨します。
-
サブフレーム(770B):特徴作成、ワーク座標系設定、測定、およびレポート生成の完全なフローが含まれており、実際のワークにおける座標系設定から結果出力までのプロジェクト全体を理解するのに適しています。
-
よく使われる特徴(all_features):基準球、丸穴、長穴、角穴、ねじ穴、スタッド・ボルト、面・点、高さ、挟み角などの一般的な特徴を集中して展示します。同時にGD&T、カスタム制御項目、および複数の特徴が同一の測定プロジェクトを共有するなどの典型的なシナリオにも対応しています。
Mech-Metrics サンプルプロジェクトを開くと、リソースツリーの上部にこれら2つのワークを確認できます。本チュートリアルを読む際は、まずワークリストの「770B」を選択して一度フローの検証を完了し、「all_features」に切り替えて様々な特徴タイプのサンプルを確認することを推奨します。
リソースツリーで以下のノードを順にクリックし、それぞれについて理解を深めてください。
-
ワーク:ワークの新規作成方法とワークの属性設定について理解します。具体的な操作は、ワークに関する操作をご参照ください。
-
CAD:ワークのCADモデルを確認し、ワークにCADモデルファイルを関連付ける方法について理解します。具体的な操作は、ワークへの CAD 参照オブジェクトのインポートをご参照ください。
-
特徴:ワークの特徴リストを確認し、異なるタイプの特徴の定義や属性設定、各種制御項目の設定、および注釈カードの設定について理解します。具体的な操作は、特徴に関する操作をご参照ください。
-
座標系設定:現在の座標系設定方法、および座標系設定に使用される特徴とパラメータ設定について理解します。座標系に関する説明は、座標系をご参照ください。具体的な操作は、座標系設定に関する操作をご参照ください。
-
レポート:現在のレポート形式を表示し、レポート形式の変更およびレポートのエクスポートを試みます。詳細については、測定レポートを使用するをご参照ください。
10分で Mech-MSR サンプルプロジェクトを理解する
丸穴測定(Datum Y4)プロジェクトを例にとると、この Mech-MSR プロジェクトの構造は以下の通りです。
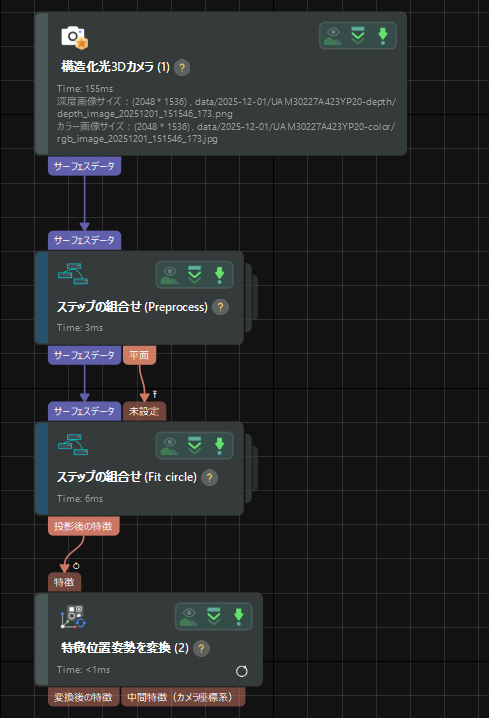
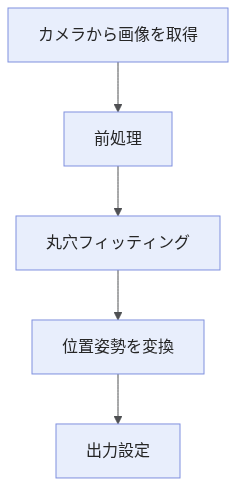
このサンプルプロジェクトには以下の5つのステップが含まれています。
以下、各ステップを順に簡単に説明し、デバッグ時の注意点を提供します。
| デバッグ時は、3Dビューの上部でデバッグ結果出力オプションを有効にしてから、各ステップの処理結果を確認してください。本番環境では、Mech-MSR プロジェクトが Mech-Metrics によってトリガーされると、このオプションは自動的にオフになります。 |
カメラからの画像取得
構造化光3Dカメラステップを介して画像を取得し、表面データとして処理します。通常、このステップは変更する必要はありません。
初回の測定点デバッグ時には、投影パラメータを自動計算にチェックを入れることを推奨します。これにより、現在の点群に基づいて新しい投影パラメータが自動計算されます。チェックを入れないと、Mech-Eye Viewer 内の点群は完全であるにもかかわらず、構造化光3Dカメラステップの点群に欠損が生じる可能性があります。
| プロジェクトの実行後、このオプションのチェックは自動的に外れ、その後の実行でもオフ状態が維持されます。初回デバッグ時にこのオプションを使用してフローをすばやく検証し、その後のデバッグではオフのままにして実際の測定状況をより正確に反映させることを推奨します。 |
前処理
3D ROI内のサーフェスデータを抽出し、基準平面をフィッティングします。このステップでは、ステップの組合せを使用して前処理プロセスを実現します。ダブルクリックして各サブステップの具体的な設定と処理内容を確認できます。
前処理のステップ組合せには以下のサブステップが含まれています。
-
サーフェスの前処理
機能:測定点の3D ROIを選択し、関心のあるサーフェスデータを抽出します。
ここでは実際の穴の位置に応じて「領域タイプ」を変更します。通常は直方体または円柱を選択します。領域のサイズを調整するには、Ctrlキーを押しながらマウスでドラッグします。
3Dデータビューエリアにおいて、透視モードでは特徴領域の調整がしにくい場合、サーフェスモードまたはプロファイルモードに切り替えて調整することも可能です。 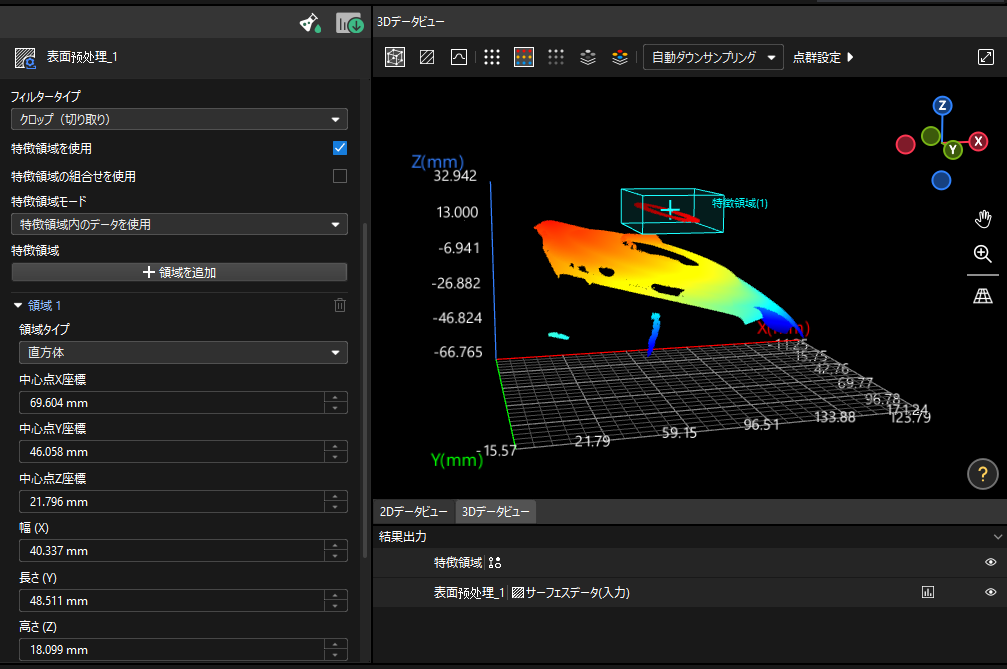
-
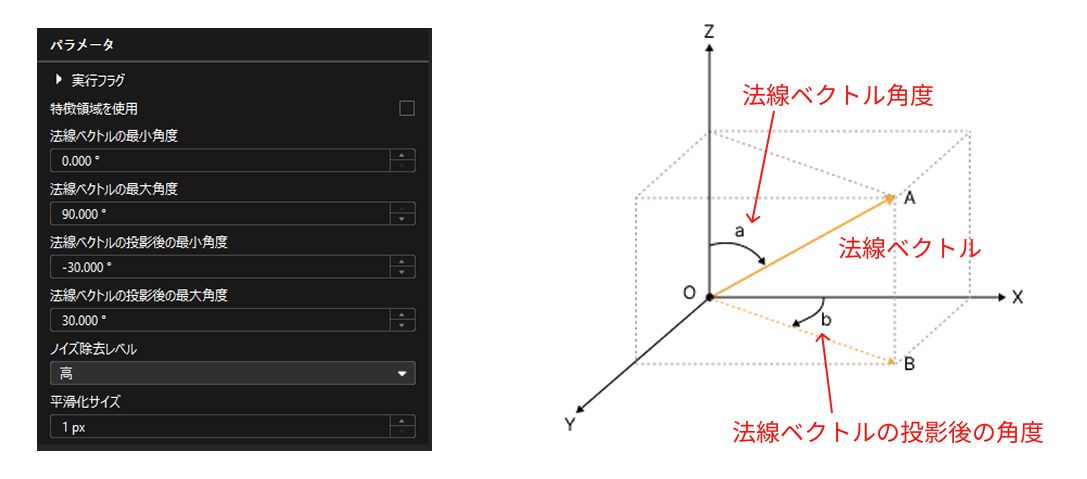
サーフェス点のフィルタリング(法線ベクトルによる)
機能:サーフェスやエッジのノイズをフィルタリングし、平面を抽出します。
サーフェスノイズの法線ベクトルは通常、平面の法線ベクトルと異なるため、法線ベクトルの角度を調整して平面から外れた点をフィルタリングできます。特に「法線ベクトルの投影後の最小角度」が有効です(下図参照)。必要に応じて「サーフェスからノイズを除去」ステップと組み合わせて使用することもできます。

-
サーフェスを平面にフィット
機能:平面をフィッティングし、後続の特徴の基準平面とします。
通常、このステップは変更する必要はありません。
丸穴フィッティング
特徴領域内の丸穴をフィッティングします。このステップでは、ステップの組合せを使用して丸穴フィッティングプロセスを実現します。ダブルクリックして各サブステップの具体的な設定と処理内容を確認できます。
丸穴フィッティングのステップ組合せには以下のサブステップが含まれています。
-
サーフェス変換
機能:後続のノイズ除去および穴フィッティングを容易にするために、サーフェスデータを傾斜状態から水平状態に変換します。
通常、このステップは変更する必要はありません。
-
サーフェスからノイズを除去
機能:サーフェスのノイズを一部除去し、エッジの特徴を保持する。
「深度差のしきい値」パラメータを調整し、3Dデータビューエリアで効果を確認する必要があります。
-
サーフェスのエッジを円にフィット
機能:エッジの変化に基づいて丸穴をフィッティングします。
主に特徴領域を調整し、その他のパラメータはサンプルプロジェクトのままで変更不要です。3Dデータビューエリアでは、異なる視点に切り替えて結果を確認できます。
透視モードにおいて、フィッティングされた円が穴の下方に表示されるのは正常であり、後続のステップでこの円を基準平面に投影します。 -
特徴位置姿勢を変換
機能:特徴を水平状態から元の傾斜状態に復元します。
通常、このステップは変更する必要はありません。
-
特徴を平面に投影
機能:特徴を基準平面に投影します。
通常、このステップは変更する必要はありません。
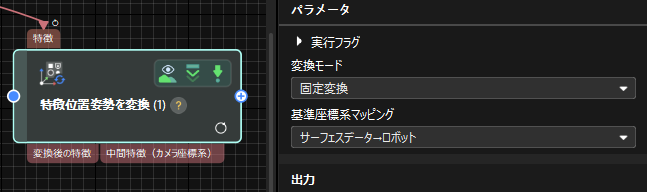
特徴位置姿勢を変換
「特徴位置姿勢を変換」ステップを使用して、丸穴の位置姿勢をサーフェスデータ座標系からロボット座標系に変換します。ロボット座標系は固定されているため、各特徴の座標を統一するために、通常は特徴の位置姿勢をロボット座標系に変換してから外部に送信します。
出力設定
Mech-MSR のツールバーで出力管理ボタンをクリックします。
-
通信出力タブで、現在モードが「インライン測定」であることを確認します。
-
出力エリアで、出力される測定項目が「特徴位置姿勢を変換」ステップの「変換後の特徴」ポートであることを確認し、通信キーパラメータを設定します。

- 通信キーの設定方法
-
測定プロジェクトが単一の特徴(測定項目)のみを出力する場合は、通信キーを「feature」に設定するだけで構いません。
測定プロジェクトが単一の特徴と単一のGD&Tを出力する場合、単一特徴の通信キーは「feature」、GD&Tの通信キーは「gdt」に設定できます。単一特徴+単一GD&Tの通信キーの設定方法を理解するために、「長穴例(平面度含む)」プロジェクトの設定を確認してください。
測定プロジェクトが複数の特徴およびGD&Tを出力する場合、各特徴の通信キーには Mech-Metrics で指定した特徴名を設定し、各GD&Tの通信キーには Mech-Metrics で指定したGD&T名を設定する必要があります。つまり、Mech-Metrics が異なる特徴やGD&Tのデータを正しく区別できるようにするために、通信キーは Mech-Metrics で設定した特徴名およびGD&T名と一致させる必要があります。複数の特徴とGD&Tの通信キーの設定方法を理解するために、「2つの長穴」プロジェクトの設定を確認してください。
特徴のカスタム制御項目において、通信キーは Mech-Metrics で設定したカスタム制御項目の名前と一致させる必要があります。カスタム制御項目の通信キーの設定方法を理解するために、「エラー防止機能付き丸穴」プロジェクトの設定を確認してください。
15分のミニ演習
フロー検証を完了しただけで、自力での操作ができないという状況を避けるために、まず「円特徴の追加」というミニ演習を行うことを推奨します。
-
Mech-MSR で既存の丸穴サンプルプロジェクトをコピーして新しい測定プロジェクトを生成し、新しい測定点に基づいて特徴領域を調整します。
-
Mech-Metrics で新しい円特徴を追加し、新規作成した測定プロジェクトにバインドします。具体的な操作は特徴の作成と編集をご参照ください。
-
後続の通信トリガー時に正確に呼び出せるように、その特徴に特徴番号を設定します。
-
通信シミュレーションツールで、新しい特徴測定コマンドを追加します。
-
Add Commandボタンをクリックし、表示されたダイアログで「measureFeature」コマンドを選択してから、OKボタンをクリックします。
-
新しいコマンドをダブルクリックして名前を変更し、対応するパラメータ値を設定します。特に特徴番号が Mech-Metrics で新規追加した円特徴の番号と一致していることを確認してください。
-
Move Upボタンを使用して、新しいコマンドを測定開始と測定終了の間に移動します。
-
-
シミュレーションを再実行し、以下の基準に照らし合わせて編集が成功したかどうかを判断します。
-
Mech-Metrics で新規作成した円特徴が正常にトリガーされ、明らかなエラーが発生していないこと。
-
Mech-MSR で調整したROIと特徴領域が対象の測定点を安定してカバーできること。
-
編集前と比較して、新規作成した特徴に表示可能な測定結果が生成されているか、または元の結果に予想通りの変化が見られていること。
-
現在の目的はソフトウェアの操作に慣れることだけであるため、測定プロジェクトをゼロから構築する必要はありません。通常、サンプルプロジェクトを直接コピーしてその上で修正する方がはるかに効率的です。
FAQ:結果がおおむね正しいかどうかを素早く判断するには?
初回デバッグ時は、まず以下の2つの方法で迅速に判断できます。
-
3Dビューを確認する:特徴フィッティング関連のステップで、フィッティングされた特徴が実際の輪郭に合っているかを確認します。フィッティングされた輪郭が実際の穴位置やエッジから明らかにずれている場合、通常はROI、特徴領域、またはフィルタリング条件の調整が必要であることを意味します。
-
出力データを確認する:「特徴位置姿勢を変換」ステップで中間特徴データを確認し、主要な座標値が合理的な範囲にあるかを確認します。この方法は、明らかな異常を素早く特定するのに適しています。
これら2つの方法は正式な検収の代わりにはなりませんが、現在のプロジェクトが基本的な正しさを備えているかを迅速に判断するために使用できます。
サンプルから実戦へ
| やりたいこと | おすすめのマニュアル |
|---|---|
完全なインライン測定ソリューションの展開 |
|
Mech-MSR ソリューションと測定プロジェクトの作成 |
|
Mech-Metrics プロジェクトの作成 |
|
ワーク座標系設定 |
|
測定特徴の設定と編集 |
|
測定履歴データの分析 |
次の学習パス
-
インライン測定ソリューションの展開を引き続き読み、プロジェクト全体に対して体系的な認識を確立してください。
-
必要に応じてMech-Metrics 使用ガイドに進み、機能レベルの設定を完了してください。