動的繰り返し精度テスト
本節では、動的繰り返し精度をテストする方法について説明します。
|
動的繰り返し精度に影響を与える要因
動的精度に影響を与える要因:
動的テストは半動的テストに比べて治具の繰り返しクランプステップが追加されるだけです。動的繰り返し精度に影響を与える要因は以下にあります:
-
繰り返しクランプ精度
-
クランプごとのワークの変形度合い
確認方法:
現場での作業中に、動的精度と半動的精度に大きな差があることが判明した場合は、治具の繰り返しクランプ精度や、クランプごとのワークの変形度合いを調査してください。
動的繰り返し精度テスト
以下の手順に従って、動的繰り返し精度をテストしてください。
-
Mech-Metrics ソフトウェア設定画面の分析と補正タブの下にある動的繰り返し精度をクリックします。
-
半動的繰り返し精度テストページで、テストを行うワークとして現在クランプされているワークを選択し、タイプを動的に、データソースをリアルタイムデータに設定し、繰り返し回数を20に設定してから、テストを開始をクリックします。
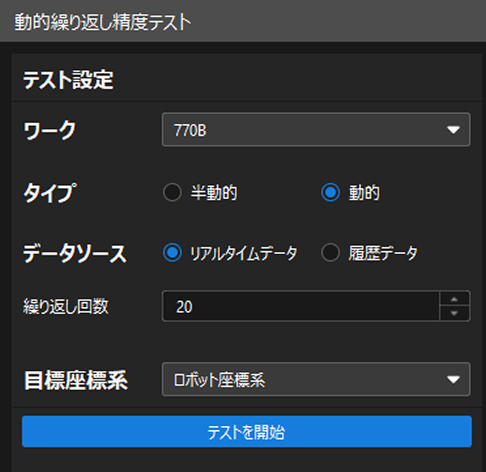
推奨推奨測定回数は20~50回です。
-
ロボット側でロボットプログラムを20回実行します。
-
テスト完了後、本画面の右側でテスト結果を確認します。
エラーが発生した場合は、ソフトウェアに表示されるメッセージに従って原因を特定してください。
本ソフトウェアでは、デフォルトの動的合格しきい値は繰り返し精度の範囲が ≤0.20mmです。プロジェクトによって異なる合格しきい値の要件がある場合、テクニカルサポートまでご連絡いただければ、変更が可能です。