TCP標準インターフェースコマンド
本節では、インライン測定システムがサポートするTCP標準インターフェースコマンドについて説明します。TCP標準インターフェースコマンドは、ロボットとインライン測定システム間のTCPプロトコル通信を実現するために使用されます。
コマンド一覧
| コマンド | 呼び出し順序 | 呼び出し必須か | 説明 |
|---|---|---|---|
- |
任意 |
Mech-Metrics でプロジェクトを切り替える |
|
① |
必須 |
ロボットまたは外部機器を使用して、Mech-Metrics に新しいワークの測定開始を通知し、ワーク名、ワークSN、およびその他のワーク情報を Mech-Metrics に送信する |
|
② |
必須 |
対応する測定特徴の Mech-MSR プロジェクト実行をトリガーする。複数回の測定を行う場合は、このコマンドを複数回呼び出し可能 |
|
④ |
必須 |
ロボットまたは外部機器を使用して、Mech-Metrics に測定終了を通知し、ワークの測定結果を問い合わせる |
|
③ |
任意 |
一部のユースケースでは、測定開始時にワークSNを取得できない。例えば、測定中にバーコードやQRコードをスキャンして取得しなければならない。このコマンドは、ワーク測定中にワークSNを入力するために使用する |
|
⑥ |
任意 |
ワークSNを入力することで、Mech-Metrics ソフトウェアのメイン画面を対応するワークのデータビューに切り替える |
|
- |
必須 |
ロボットのキャリブレーションプロセスの制御およびステータス照会。コマンド呼び出しの際にキャリブレーション状態パラメータを入力し、キャリブレーションの再開またはキャリブレーションポイントの追加に使用する。また、現在のキャリブレーション状態、次のキャリブレーションポイントのフランジ位置姿勢、および関節角度情報を返す |
|
インライン測定システムがサポートするコマンド送信方式は下図の通りです。 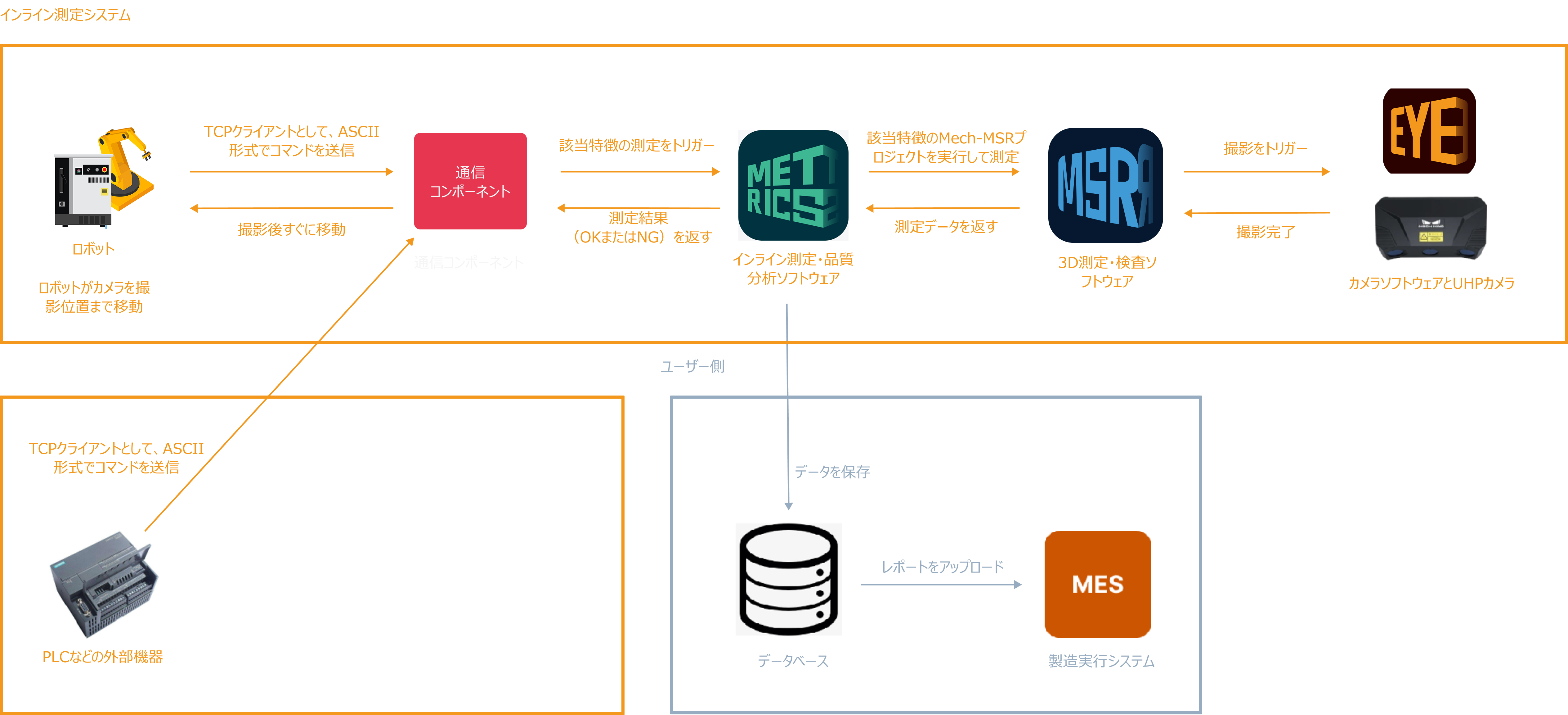
説明は以下の通りです:
|
通信コマンド
800コマンド——プロジェクトの切り替え
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
受信側
Mech-Metrics
送信のタイミング
プロジェクトの切り替えを開始する前に。
コマンド機能
ロボットまたは外部機器が Mech-Metrics にプロジェクト切り替えの開始を通知します。
コマンド形式
800,ワーク番号,プロジェクト番号サンプル
800,1,1パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある
|
プロジェクト番号 |
必須 |
切り替え対象のプロジェクトを指定する番号。指定するプロジェクト番号は、あらかじめプロジェクト切り替え管理で設定されている必要がある
|
コマンド返信
送信側
Mech-Metrics
受信側
ロボットまたは外部機器(PLCなど)
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
Mech-Metrics はロボットに新しいプロジェクトへの切り替えコマンドを受信したことを通知して新規プロジェクトへの切り替えを開始し、今回の切り替えが成功したかどうかをロボットに通知します。
コマンド形式
800,ステータスコードサンプル
800,8105パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8105 で、コマンドが正常に実行されたことを示している |
801コマンド――測定タスクの開始
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
受信側
Mech-Metrics
送信のタイミング
新しいワークの測定を開始する時点。
コマンド機能
ロボットまたは外部機器が Mech-Metrics に新しいワークに対する測定の開始を通知します。
コマンド形式
801,ワーク番号,ワーク名,ワークSN,品質検査モード,カスタム1,カスタム2,カスタム3,カスタム4,カスタム5,カスタム6,カスタム7,カスタム8サンプル
801,1,part01,sn001,2,1,2,3,4,5,6パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある 上記のサンプルでは、1番目の 1 がワーク番号 |
ワーク名 |
必須 |
測定対象となるワークの名前。ワーク名には英数字を含めることが可能、長さは20文字以内 上記のサンプルでは、part01 がワーク名 |
ワークSN |
必須 |
ワークのシリアル番号。該当ワークの一意の識別子(ID)。ワークSNには英数字を含めることが可能、長さは30文字以内 上記のサンプルでは、sn001 がワークSN 必須入力項目。一部のユースケースでは、測定開始時にワークSNを取得できない。例えば、測定中にバーコードやQRコードをスキャンして取得しなければならない。その場合、このパラメータを空欄にしても構わないが、パラメータの配置位置は確保必要しておく必要がある 例:801,1,part01,,1,2,3,4,5,6 この例では、ワークSNは入力されていないが、カンマ(,)によってパラメータの配置位置が確保されている |
品質検査モード |
必須 |
品質検査モードを指定する。1:全数検査(ワークの全寸法を測定する) 2:抜取検査(ワークの主要寸法を測定する) 0:現在の設定を使用する 上記のサンプルでは、1番目の 2 は品質検査モードが抜取検査であることを示している |
カスタム1~8 |
任意 |
オプション、ワークのカスタム情報を提供する。カスタムパラメータは、Mech-Metrics により多くのワーク情報を提供する必要がある場合にのみ使用される。このコマンドでは、最大8つのカスタムパラメータを指定可能、各カスタムパラメータの値は1から8までの整数 カスタムパラメータを使用する場合:
上記のサンプルでは、1,2,3,4,5,6 がカスタムパラメータであり、すでに Mech-Metrics ソフトウェア内でそのパラメータ値の意味が設定されている |
コマンド返信
送信側
Mech-Metrics
受信側
ロボットまたは外部機器(PLCなど)
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
Mech-Metrics は新しいワークに対する測定開始のコマンドを受信したことをロボットに通知し、新しいワークの履歴データ項目の作成を開始し、今回の実行が連続実行か通常の実行かをロボットに通知します。
コマンド形式
801,ステータスコード,連続実行/実行サンプル
801,8100,1パラメータ説明
| パラメータ | 説明 | ||||
|---|---|---|---|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8100 で、コマンドが正常に実行されたことを示している |
||||
連続実行/実行 |
今回の実行が連続実行か通常の実行かを示す
上記のサンプルでは、1 は連続実行を示している
|
802コマンド――特徴測定の実行
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
受信側
Mech-Metrics
送信のタイミング
ロボットが測定対象特徴の撮影位置に到達した時点。
コマンドの機能
対応する測定特徴の Mech-MSR プロジェクト実行をトリガーする。
コマンド形式
802,ワーク番号,測定特徴番号,ロボット関節角度,ロボットフランジ位置姿勢サンプル
802,1,1,10,20,30,40,50,60,100,200,300,0,180,0パラメータ説明
| パラメータ | 必須か | 説明 | ||
|---|---|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある 上記のサンプルでは、1番目の 1 がワーク番号 |
||
特徴測定番号 |
必須 |
測定対象となる特徴の番号。該当特徴の一意の識別子(ID)。測定特徴番号は1から999までの整数
上記のサンプルでは、2番目の 1 が特徴測定番号 |
||
ロボットの関節角度 |
必須 |
ロボットの関節角度データ。通常はロボットの6つの関節角データ(J1〜J6)。単位:度(deg) 上記のサンプルでは、10,20,30,40,50,60 がロボットの関節角データ |
||
ロボットのフランジ位置姿勢 |
必須 |
ロボットのフランジ位置姿勢データ。通常は3つの位置データと3つの姿勢データを含む6つのデータ。位置データ単位:ミリメートル(mm) 姿勢データ(オイラー角で表示)単位:度(°) 上記のサンプルでは、100,200,300,0,180,0 がロボットのフランジ位置姿勢で、そのうち 100,200,300 は位置データ、0,180,0 は姿勢データ |
コマンド返信
送信側
Mech-Metrics
受信側
ロボットまたは外部機器(PLCなど)
送信のタイミング
Mech-Metrics がカメラの撮影完了信号を受信した時点。
コマンドの機能
カメラの撮影が完了したことをロボットに通知し、ロボットを次の測定位置へ移動させます。
コマンド形式
802,ステータスコードサンプル
802,8101パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8101 で、コマンドが正常に実行されたことを示している |
803コマンド――測定タスクの終了
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
受信側
Mech-Metrics
送信のタイミング
最後の測定対象特徴の撮影が完了し、ワークの測定が完了した時点。
コマンド機能
ロボットまたは外部機器がMech-Metrics に測定終了を通知し、ワークの測定結果を問い合わせます。
コマンド形式
803,ワーク番号サンプル
803,1パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある 上記のサンプルでは、1 がワーク番号 |
コマンド返信
送信側
Mech-Metrics
受信側
ロボット
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
測定結果を返します。
コマンド形式
803,ステータスコード,判定結果,ワーク状態1,ワーク状態2,ワーク状態3サンプル
803,8102,0,0,0,0パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8102 で、コマンドが正常に実行されたことを示している |
ワーク判定 |
ワークの判定結果
上記のサンプルでは、1番目の 0 はワークが合格であることを示している |
ワーク状態1~3 |
公差1、公差2、公差3を超えた測定項目の数
上記のサンプルでは、最後の3つの 0 は、公差が一切設定されていない、またはどの測定項目の測定値も対応する公差を超えていないことを示している |
804コマンド――測定中のワークSN入力
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
|
ロボットと外部機器による804コマンドの送信条件:
|
受信側
Mech-Metrics
送信のタイミング
現在のワーク測定中の任意時点。
コマンド機能
一部のユースケースでは、測定開始時にワーク番号(ワークSNまたはワークID)を取得できない。例えば、測定中にバーコードやQRコードをスキャンして取得しなければなりません。このコマンドは、ワーク測定中にワークSNを入力するために使用します。
コマンド形式
804,ワーク番号,ワークSNサンプル
804,1,sn001パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある 上記のサンプルでは、1 がワーク番号 |
ワークSN |
必須 |
ワークのシリアル番号。該当ワークの一意の識別子(ID)。ワークSNには英数字を含めることが可能、長さは30文字以内 上記のサンプルでは、sn001 がワークSN |
コマンド返信
送信側
Mech-Metrics
受信側
ロボットまたは外部機器(PLCなど)
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
ワークSNの入力が成功したことをロボットに通知します。
コマンド形式
804,ステータスコードサンプル
804,8103パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8103 で、コマンドが正常に実行されたことを示している |
805コマンド――ワーク履歴データの照会
コマンド送信
送信側
ロボットまたは外部機器(PLCなど)
|
ロボットと外部機器による805コマンドの送信条件:
|
受信側
Mech-Metrics
送信のタイミング
非測定中の任意時点。
コマンド機能
外部から*ワークSN*を入力することにより、Mech-Metrics ソフトウェアのメイン画面を入力された番号のワークに切り替えます。
コマンド形式
805,ワーク番号,ワークSNサンプル
805,1,sn001パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
ワーク番号 |
必須 |
ワークを指定する一意の識別子。ワーク番号は1から99までの整数。指定するワーク番号は、ワーク番号を設定画面で既に設定されている必要がある 上記のサンプルでは、1 がワーク番号 |
ワークSN |
必須 |
ワークのシリアル番号。該当ワークの一意の識別子(ID)。ワークSNには英数字を含めることが可能、長さは30文字以内 上記のサンプルでは、sn001 がワークSN |
コマンド返信
送信側
Mech-Metrics
受信側
ロボットまたは外部機器(PLCなど)
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
ワークSNの入力が成功したことを通知します。
コマンド形式
805,ステータスコードサンプル
805,8104パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
上記のサンプルでは、Mech-Metrics が返したステータスコードは 8104 で、コマンドが正常に実行されたことを示している |
701コマンド――キャリブレーション
コマンド送信
送信側
ロボット
受信側
Mech-MSR
送信のタイミング
ロボットのハンド・アイ・キャリブレーションを行う必要がある時。
コマンド機能
ロボットが Mech-MSR にハンド・アイ・キャリブレーションの開始を通知します。このコマンドは、Mech-MSRカメラメニューの3Dカメラキャリブレーションツールと組み合わせて使用する必要があります。
コマンド形式
701,キャリブレーション状態,ロボットフランジ位置姿勢,ロボット関節角度サンプル
701,0,100,200,300,0,180,0,10,20,30,40,50,60パラメータ説明
| パラメータ | 必須か | 説明 |
|---|---|---|
キャリブレーション状態 |
必須 |
現在のキャリブレーション状態
|
フランジ位置姿勢 |
必須 |
ロボットの現在のフランジ位置姿勢。通常は3つの位置データと3つの姿勢データを含む6つのデータ。位置データ単位:ミリメートル(mm) 姿勢データ(オイラー角で表示)単位:度(°)
|
関節角度 |
必須 |
ロボットの関節角度データ。通常はロボットの6つの関節角データ(J1〜J6)。単位:度(deg)
|
コマンド返信
送信側
Mech-MSR
受信側
ロボット
送信のタイミング
送信されたコマンドを受信した時。
コマンド機能
Mech-MSR はロボットに、再キャリブレーションまたはキャリブレーションポイント追加のコマンドを受信したことを通知してコマンドの実行を開始し、今回の実行が成功したかどうかをロボットに通知します。
コマンド形式
701,ステータスコード,キャリブレーション状態,次のキャリブレーションポイントのフランジ位置姿勢,次のキャリブレーションポイントの関節角度サンプル
701,7100,0,100,200,300,0,180,0,10,20,30,40,50,60パラメータ説明
| パラメータ | 説明 |
|---|---|
ステータスコード |
コマンドの実行結果を示すステータスコード
|
キャリブレーション状態 |
キャリブレーションコマンドの実行状況
|
次のキャリブレーションポイントのフランジ位置姿勢 |
ロボットが次に移動するキャリブレーションポイントのフランジ位置姿勢データ
|
次のキャリブレーションポイントの関節角度 |
ロボットが次に移動するキャリブレーションポイントの関節角度データ
|