通信方式
インライン測定システムのハードウェアが完了した後、ユーザーは Mech-Mind インライン測定システムと外部機器(ロボット、PLC、または上位システムなど)間の通信方式を選択し、両者間のデータ交換を確立・制御する必要があります。
Mech-Mind インライン測定システムは、標準インターフェース通信を使用した外部機器との通信をサポートしています。
標準インターフェース通信
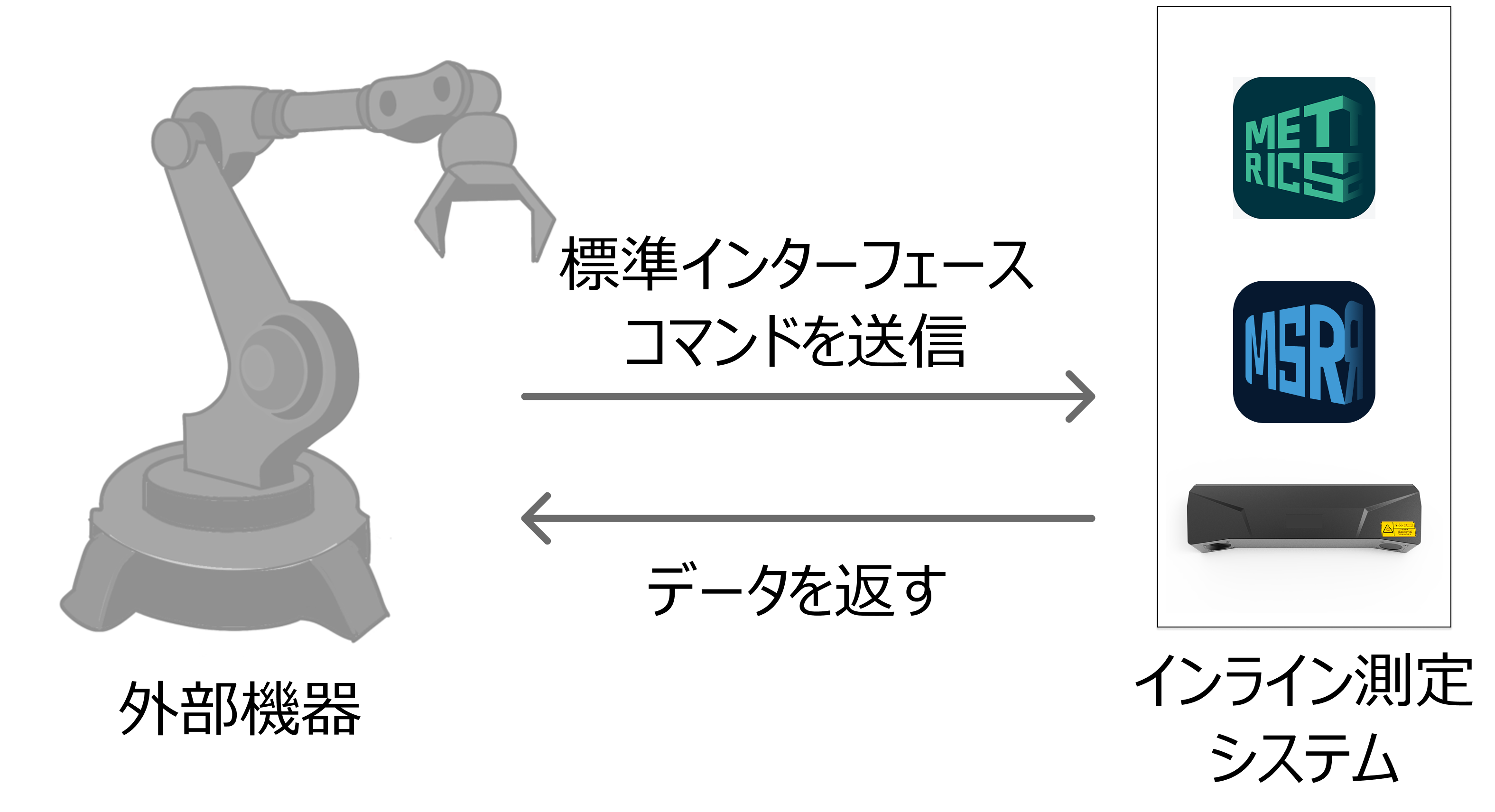
標準インターフェース通信とは、インライン測定システムと外部機器(ロボット、PLC、または上位システムなど)が通信する際、外部機器からインライン測定システムへ標準インターフェースコマンドを送信し、システムがコマンドを受信した後に対応するデータを返す方式のことです(下図参照)。この通信方式では、インライン測定システムは外部機器を能動的に制御せず、外部機器からのコマンドに従って受動的にデータを返すのみとなります。したがって、ユーザーは標準インターフェースプログラムを外部機器に書き込み、外部機器側でプログラムを作成することで、インライン測定システムとの通信およびデータ交換を実現します。
標準インターフェース通信に関する詳細については、標準インターフェース通信の使用手順をご参照ください。
標準インターフェースコマンド
標準インターフェースコマンドは、Mech-Mind が標準通信プロトコルに基づいてインライン測定システム向けに開発された一連のコマンドであり、コマンドの要求および応答データの形式を定義しています。標準インターフェースコマンドに関する詳細な説明については、標準インターフェースコマンドの説明をご参照ください。
標準インターフェースコマンドはロボット側で直接使用することはできず、ロボットは専用のロボットコマンドのみを呼び出せます。そのため、適合済みのロボットメーカーに対しては、Mech-Mind は標準インターフェースコマンドをロボットが直接呼び出し可能なロボット標準インターフェースコマンドとしてカプセル化しています。標準インターフェースプログラムをロボットに書き込んだ後は、これらのコマンドをロボットプログラム内で直接使用できるようになります。
-
Mech-Mind インライン測定システムがその外部機器にすでに適合している場合、ユーザーはロボット標準インターフェースコマンドを直接使用できます。具体的な適合状況については、標準インターフェース通信対応状況一覧表をご参照ください。
-
Mech-Mind インライン測定システムがその外部機器にまだ適合していない場合、ユーザーは「標準インターフェース開発者向けマニュアル」に従って、対応するロボット標準インターフェースコマンドを作成することで、標準インターフェース通信を実現できます。