半動的繰り返し精度テスト
本節では、半動的繰り返し精度をテストする方法について説明します。
|
半動的繰り返し精度に影響を与える要因
半動的精度に影響を与える要因:
-
ロボットの精度が低い
-
基礎が不安定なため、大きな振動が発生している
-
装置の周囲に明らかな振動源がある
-
治具の安定性が低い
確認方法:
データが良くない場合は、ImageJ ソフトウェアを使用して、同一の穴における複数回のカメラカラー画像間の位置変化を観察し、ロボットの動作速度を適切に下げてください。

半動的繰り返し精度テスト
以下の手順に従って、半動的繰り返し精度をテストしてください。
-
Mech-Metrics ソフトウェア設定画面の分析と補正タブの下にある動的繰り返し精度をクリックします。
-
半動的繰り返し精度テストページで、テストを行うワークとして現在クランプされているワークを選択し、タイプを半動的に、データソースをリアルタイムデータに設定し、繰り返し回数を20に設定してから、テストを開始をクリックします。
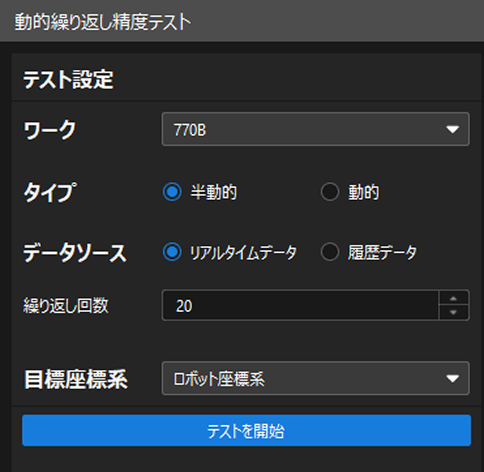
推奨推奨測定回数は20~50回です。
-
ロボット側でロボットプログラムを20回実行します。
-
テスト完了後、本画面の右側でテスト結果を確認します。
エラーが発生した場合は、ソフトウェアに表示されるメッセージに従って原因を特定してください。
本ソフトウェアでは、デフォルトの半動的合格しきい値は繰り返し精度の範囲が ≤0.15mmです。プロジェクトによって異なる合格しきい値の要件がある場合、テクニカルサポートまでご連絡いただければ、変更が可能です。