Kawasaki Calibration Program
This topic introduces the process of automatic hand-eye calibration when a Kawasaki robot communicates with Mech-Mind Vision System through Standard Interface.
| Before proceeding, please make sure that you have set up Standard Interface communication with the robot. |
Select the Calibration Program
-
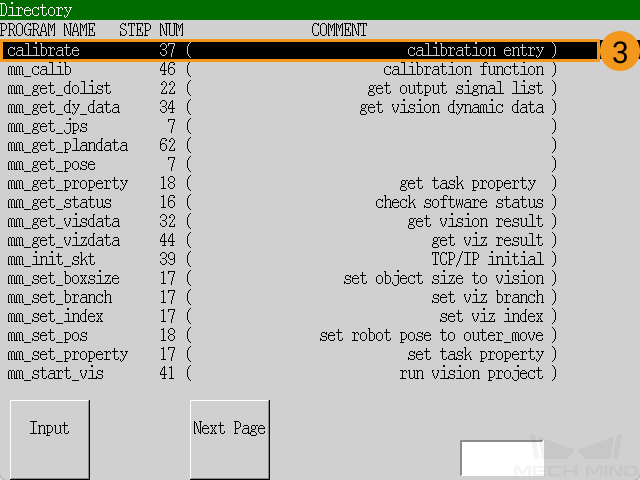
Switch the robot to the teach mode, press the Program area, and select Directory on the teach pendant. Then select calibrate from the list and press the
ENTERkey to confirm.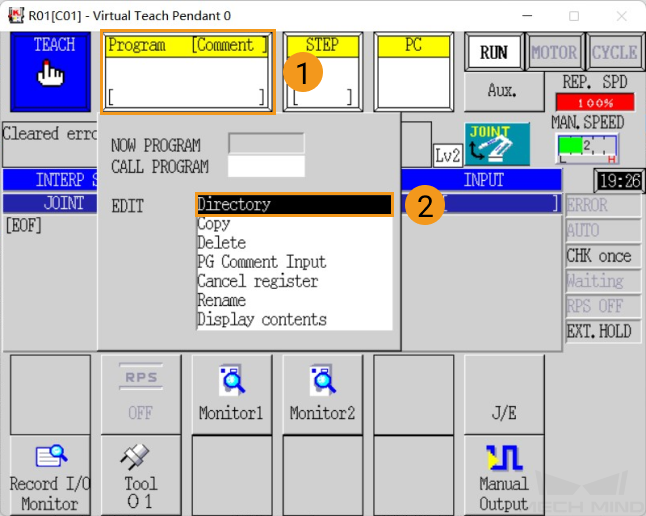
-
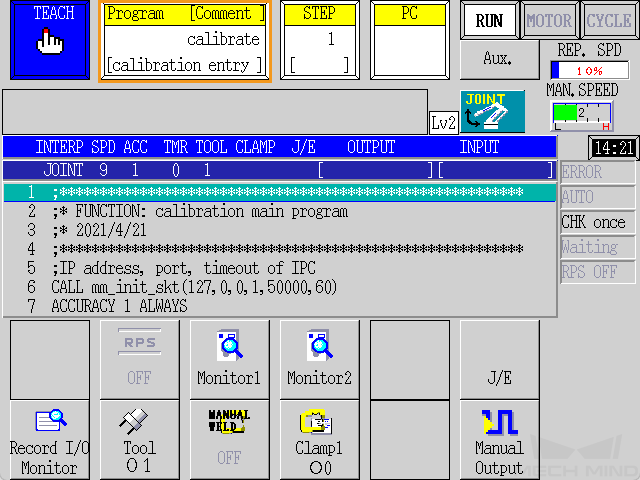
If the calibration program is selected successfully, the interface shown below will appear.
Teach the Calibration Start Point
-
Move the robot to the start point for calibration.
-
Press the STEP area, enter 13 by using the number key and then press
ENTERto confirm to select line 13 of the calibrate program.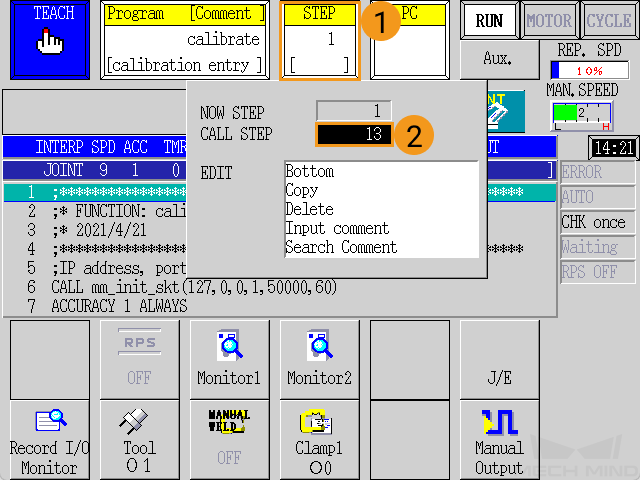
-
Press the
AandPOS MODkey on the teach pendant at the same time.
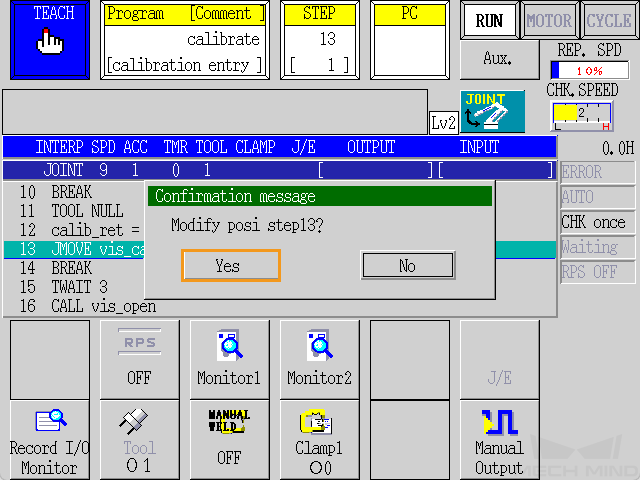
-
In the prompted window, select Yes to assign the pose of the start port to the variable vis_calib_start, which will be used the start point in future.
Run the Calibration Program
-
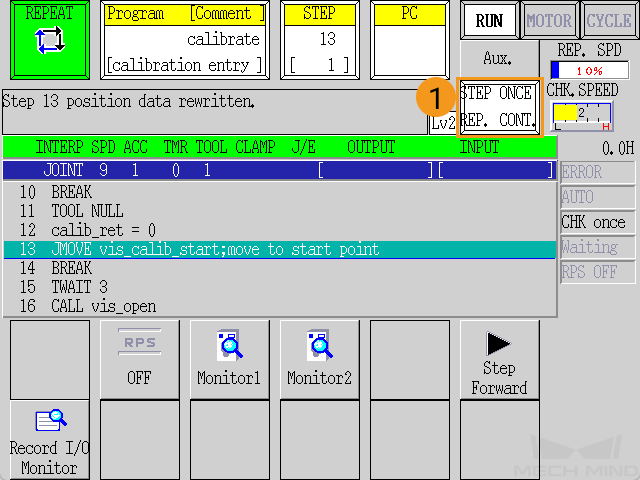
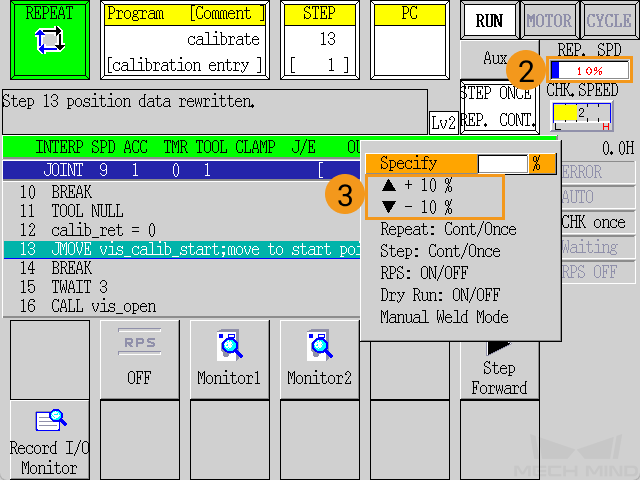
Switch the robot to the REPEAT mode, and press the white button below Aux., to change the drop-down options to STEP CONT and REPEAT ONCE, and change the repeat speed to 10%.
-
Press the STEP area, enter 1 by using the number key, and then press
ENTERto run the program from the first line.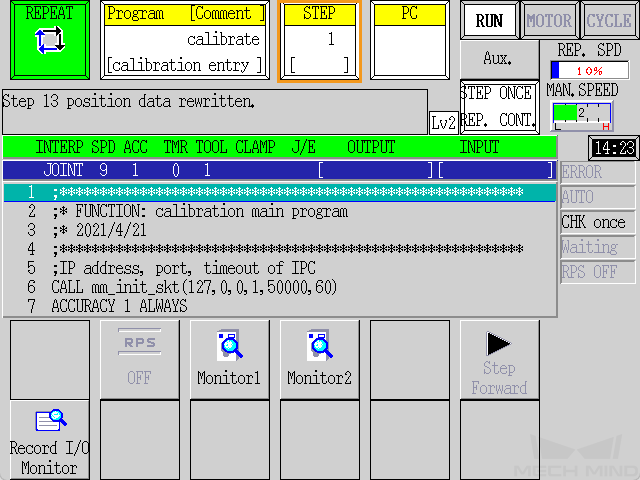
-
After the preceding settings, hold the
Akey and press MOTOR on the teach pendant to make MOTOR lit. Hold theAkey and press CYCLE on the teach pendant to make CYCLE lit. If RUN does not turn green, hold theAkey and press theRUN/HOLDkey.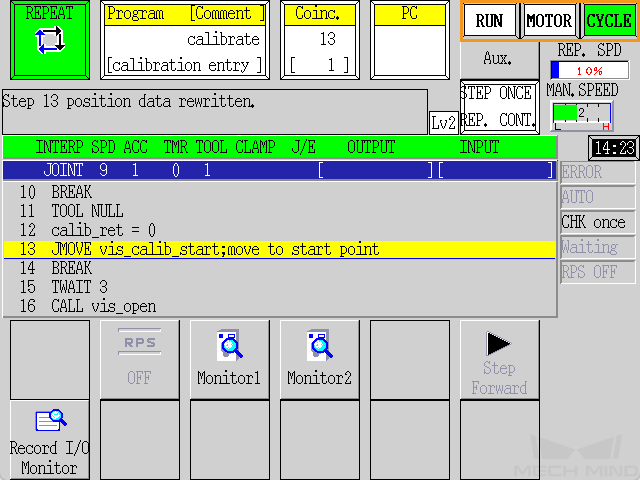
-
If the calibration program runs successfully, the message “Entering the calibration process, please start the calibration in Mech-Vision” will be displayed in the Console tab of Mech-Vision Log panel.
Complete Calibration in Mech-Vision
-
In Mech-Vision, click Camera Calibration (Standard) on the toolbar, or select from the menu bar.
-
Follow the instructions based on different camera mounting methods to complete the configuration.
-
If the camera is mounted in the eye-to-hand mode, please refer to Complete Automatic Calibration in the Eye to Hand Scenario.
-
If the camera is mounted in the eye-in-hand mode, please refer to Complete Automatic Calibration in the Eye in Hand Scenario.
-
| If the robot does not reach the next calibration point within 60 seconds, Mech-Vision will report a timeout error and stop the calibration process. In such cases, please select and run the calibration program on the teach pendant again, and restart the calibration process in Mech-Vision. |