Set up Standard Interface Communication with DENSO
This guide shows you how to set up Standard Interface communication with a DENSO robot.
Preparation
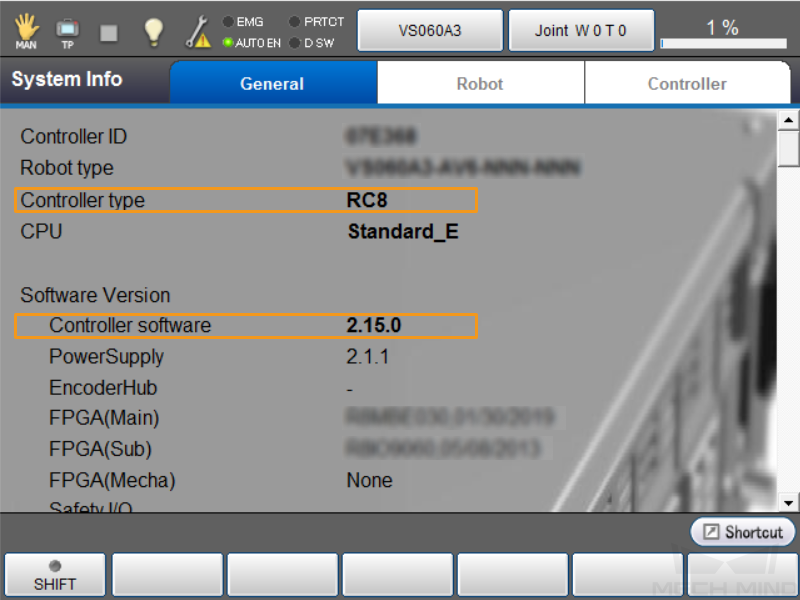
Check Controller and Software Compatibility
-
Robot type: Six-axis robot
-
Controller model: RC8
-
Controller software version: 2.15.0
Click here for instructions
-
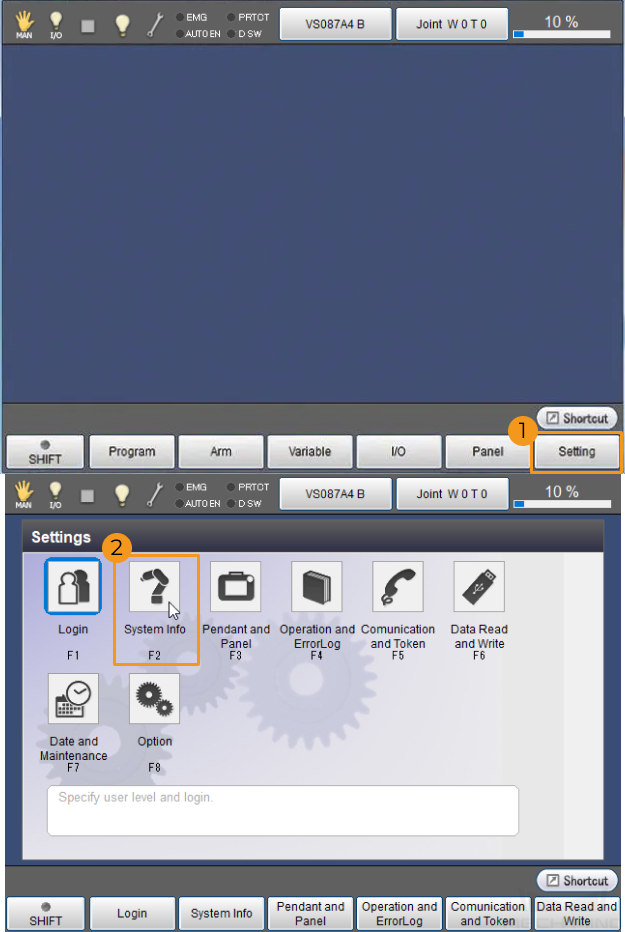
Tab on the teach pendant.
-
Check Controller type and Controller software.
-
Set up Network Connection
-
Plug the other end of the IPC’s Ethernet cable into the Ethernet port of the robot controller.
-
Make sure that the IP addresses of the DENSO robot and the IPC are on the same subnet.
Click here for instructions
-
On the teach pendant, tap .
-
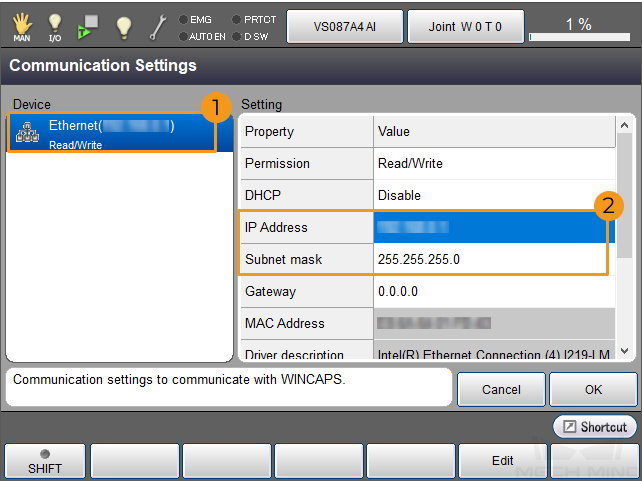
In the Communicate Settings window, select Ethernet in the Device area, and view the IP Address and Subnet mask in the Setting area. Check if the robot’s IP address is in the same subnet as the IPC.
-
If the IP address of the robot and that of the IPC are in different subnets, modify the IPC’s IP address.
-
Set up “Robot and Interface Configuration” in Mech-Vision
-
Click Robot and Interface Configuration on the toolbar of Mech-Vision.
-
Select Listed robot from the Select robot drop-down menu, and then click Select robot model. Select the Kawasaki robot model that you use, and then click Next.
-
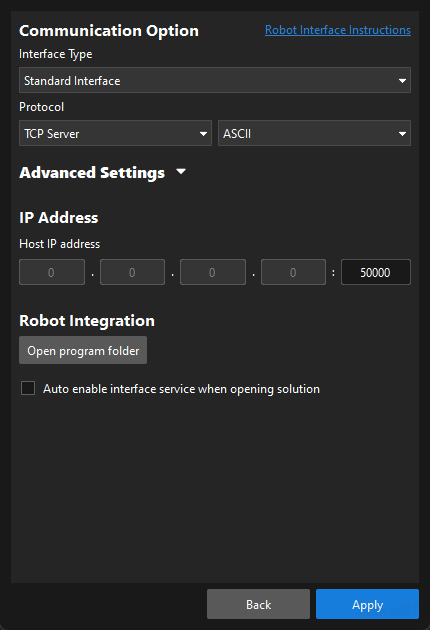
Select Standard Interface for Interface Type, and TCP Server and ASCII for “Protocol”, and then click Apply.
-
Make sure the Interface Service is started: on the toolbar of Mech-Vision, the Interface Service switch on the far right is flipped and turned to blue.

Input the IPC’s IP Addresses
-
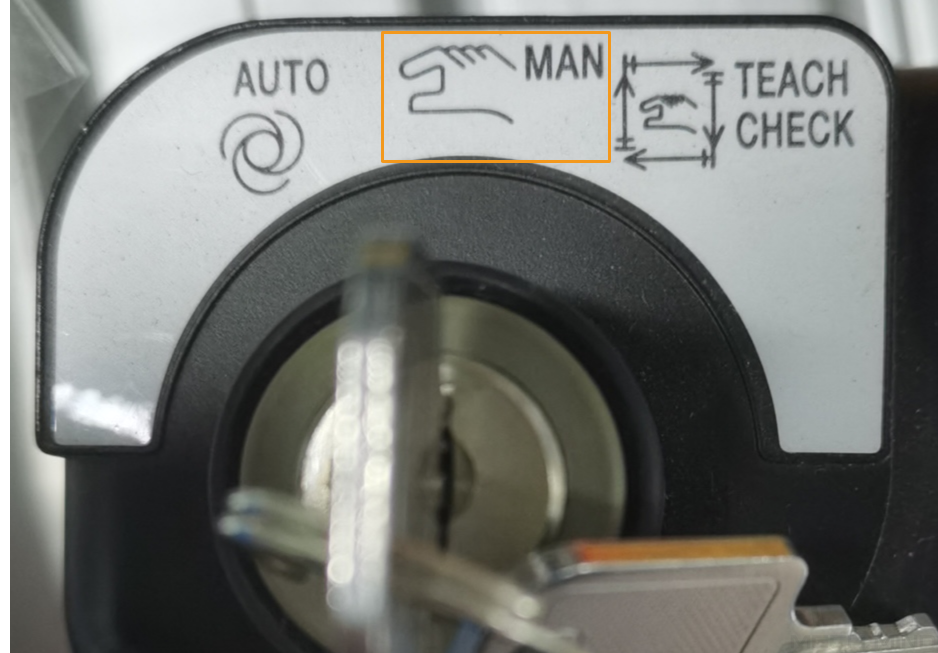
Turn the key of the teach pendant to MAN (the manual mode).
-
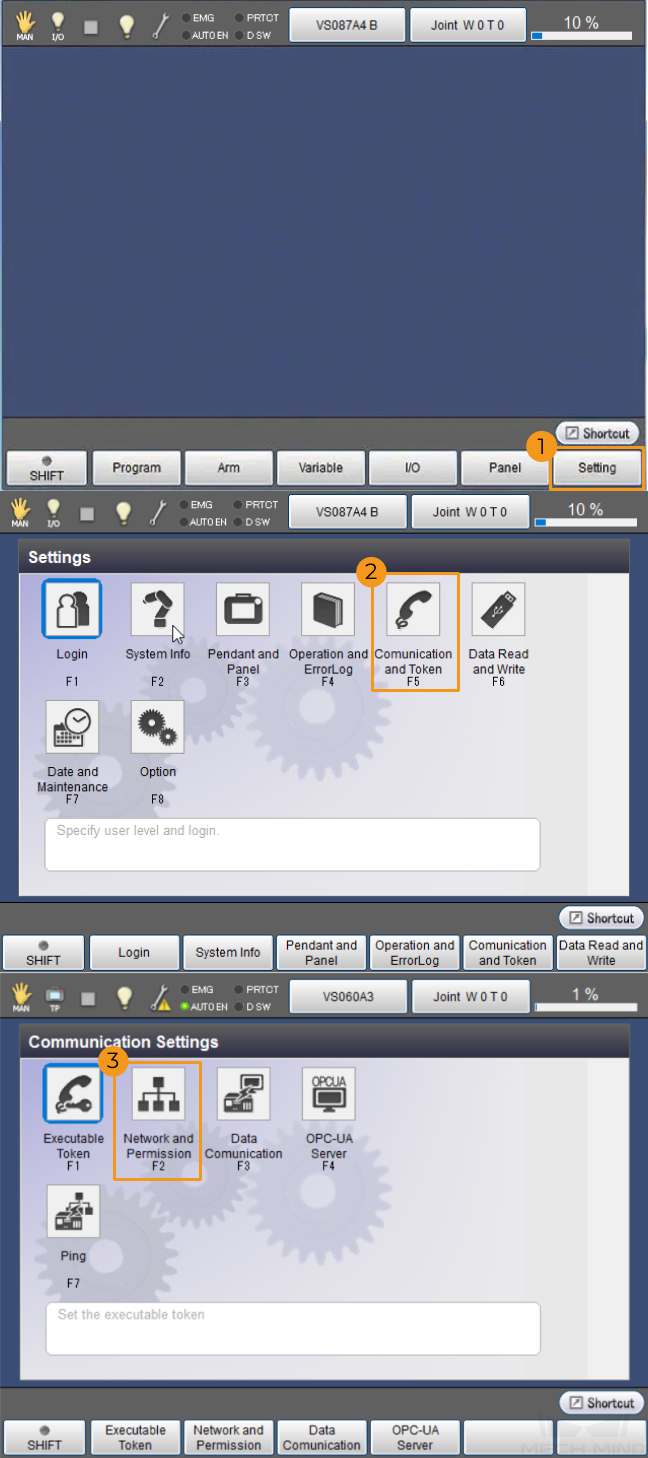
On the teach pendant, tap .

-
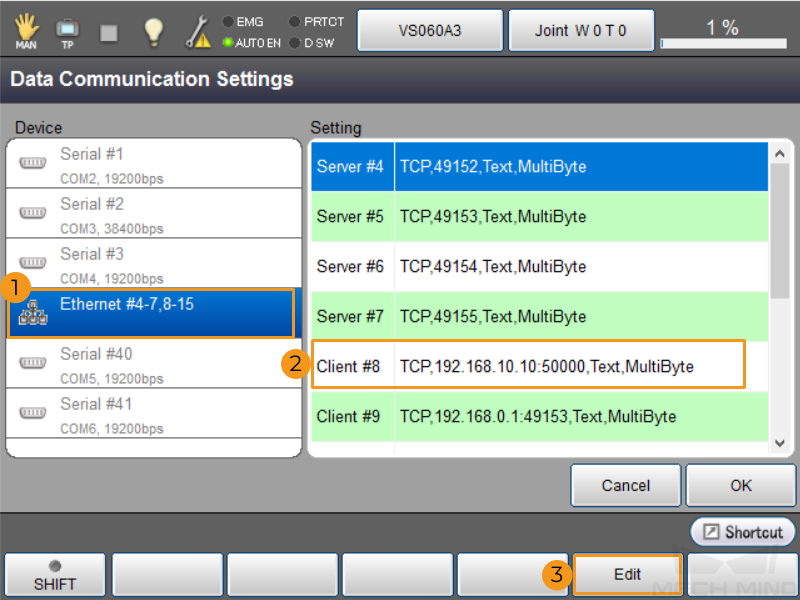
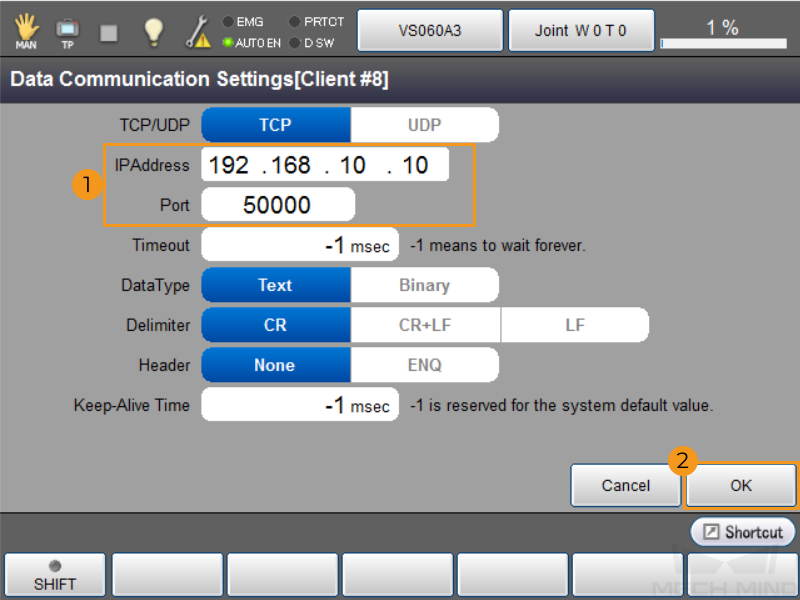
In the Data Communication Settings window, select Ethernet #4-7,8-15 in the Device panel, and select Client #8 in the Setting panel. Tap Edit.
-
In the pop-up window, set IP Address to that of the IPC, and set Port to the value set in the Robot Communication Configuration window in Mech-Vision. Tap OK.
Backup
-
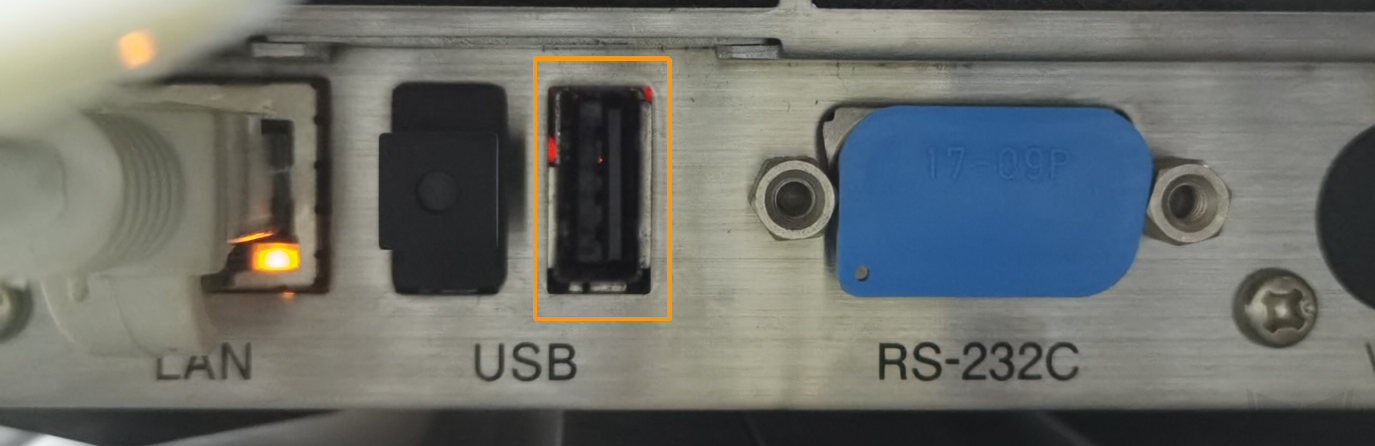
Plug the USB flash drive into the robot controller.
-
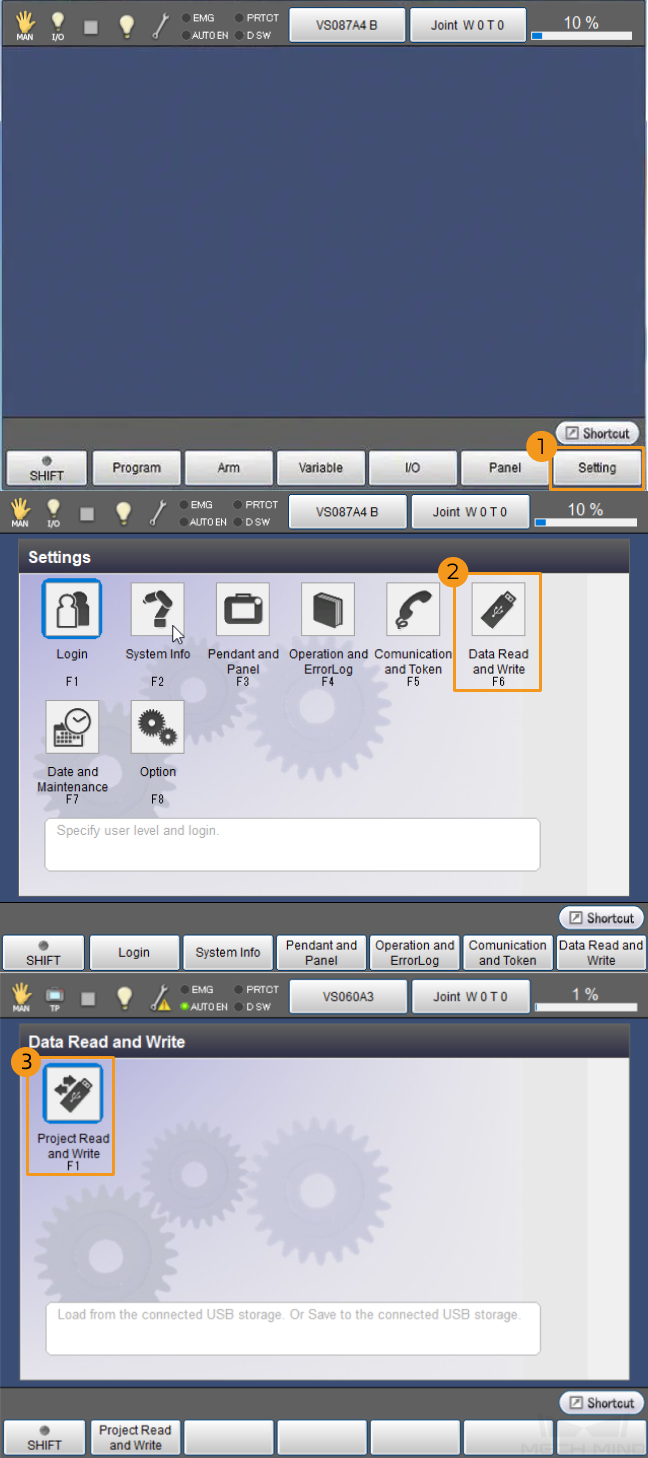
On the teach pendant, tab .
-
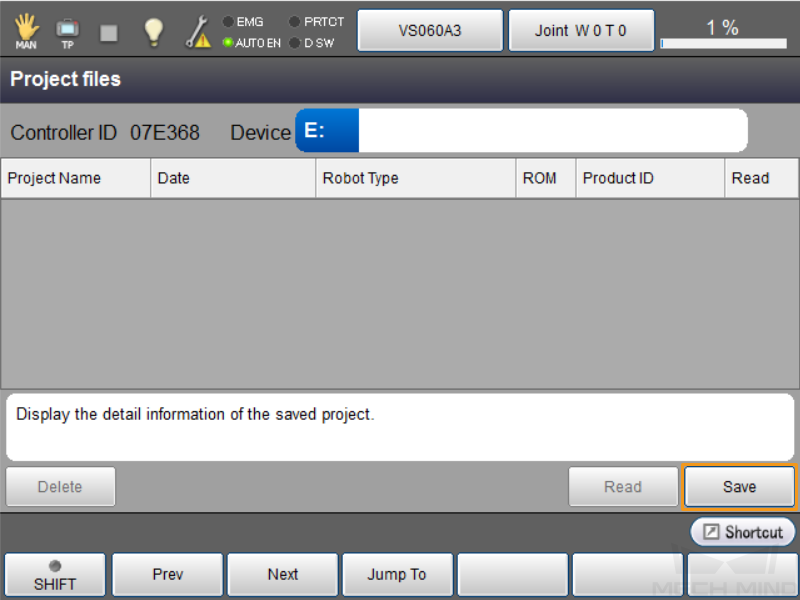
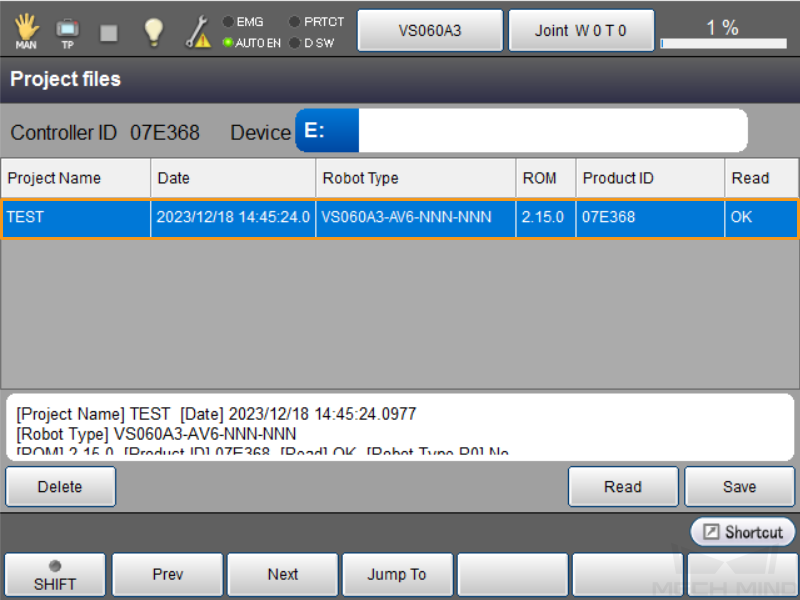
Tab Save in the Project files window.
-
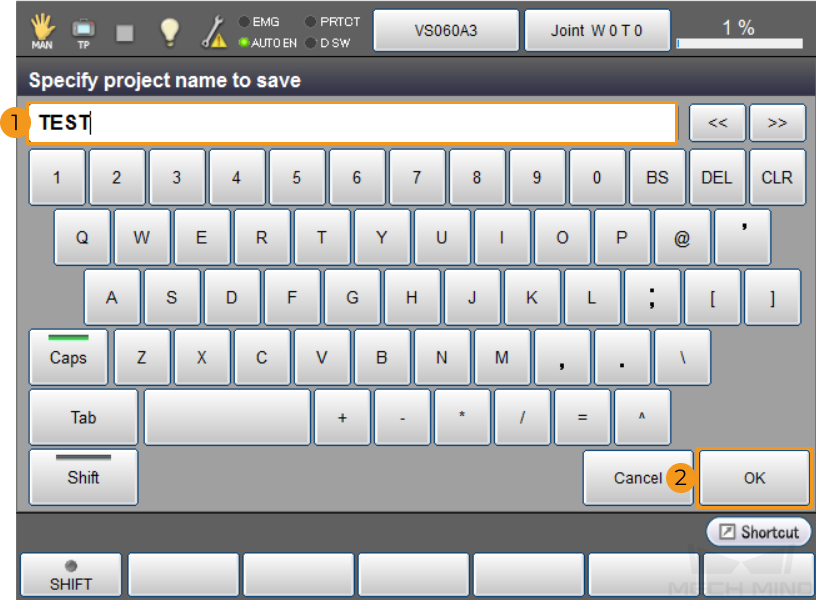
In the window that prompts Specify project name to save, enter the backup folder name and tab OK.
-
After backing up, the information of the backup files shows up in the Project files window. Project Name is the backup folder name that you input at the previous step.
Prepare Program Files
-
Plug the USB flash drive into the IPC.
-
Go to
Mech-Center\Robot_Interface\DENSOfrom the installation directory of Mech-Vision & Mech-Viz, and copy the following files:-
MM.h
-
MM_Auto_Calib.pcs
-
MM_Module.pcs
-
sample.pcs
-
-
Open the USB flash drive and find the folder Source Files in the robot backup folder. Paste the program files into the folder.
Load the Program Files to the Robot
-
Plug the USB flash drive into the robot controller.
-
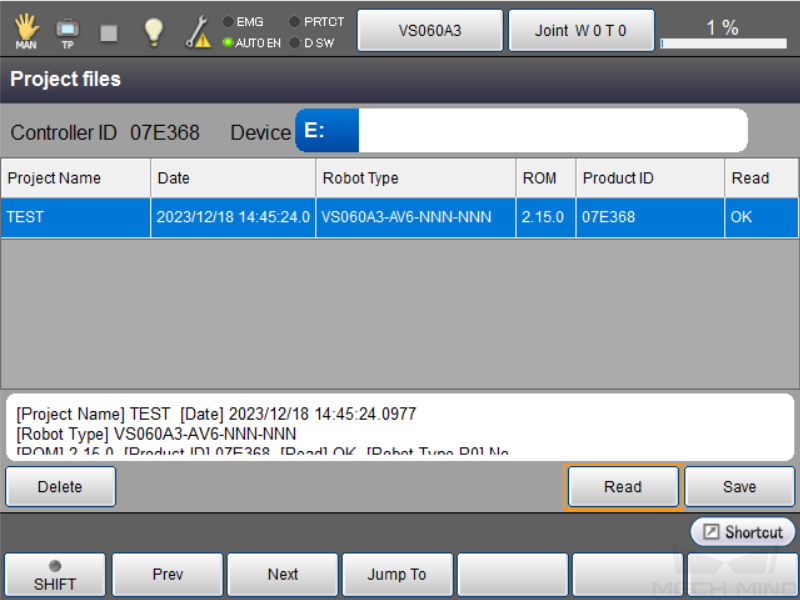
In the Project files window of the teach pendant, tap Read.
-
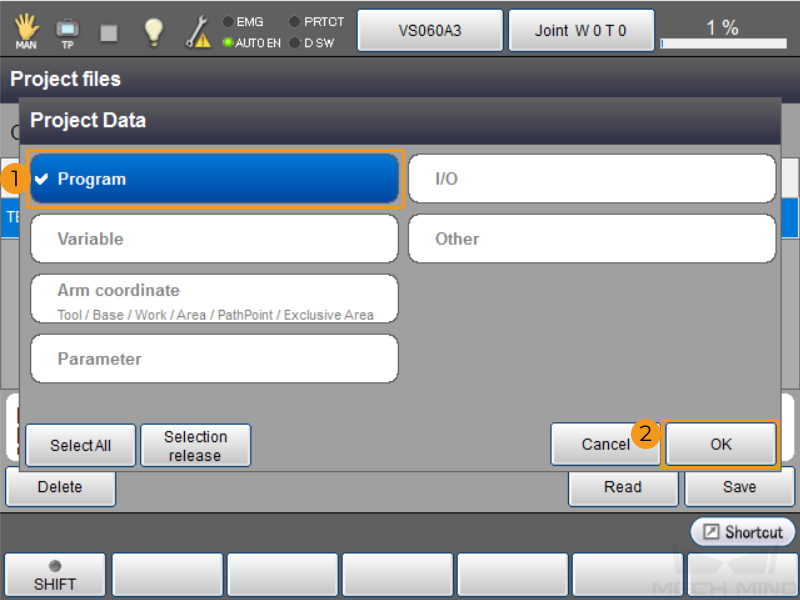
In the pop-up Project Data window, select Program and then tap OK.
-
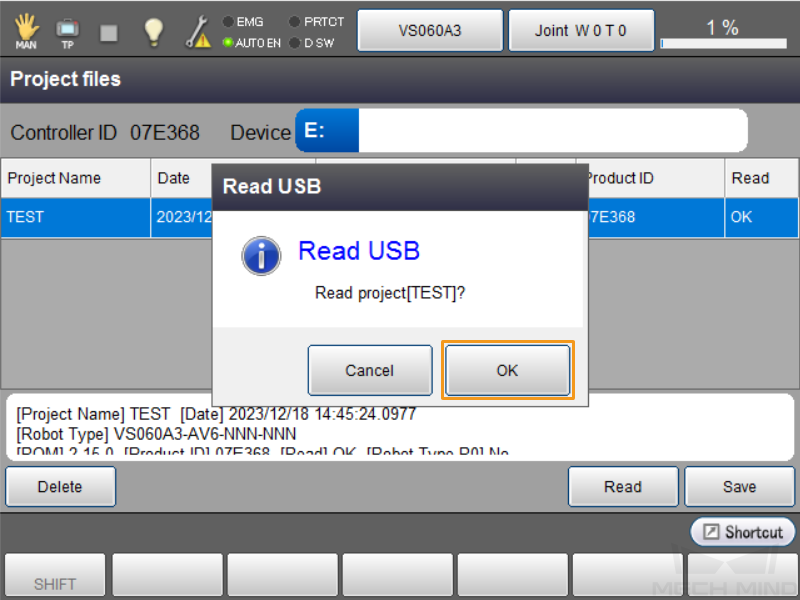
In the pop-up Read USB dialogue box, tap OK.
-
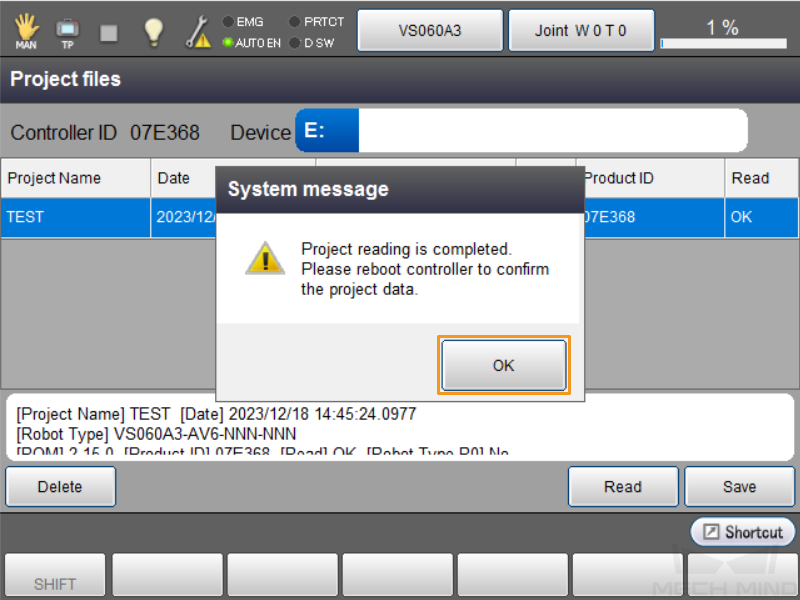
Wait a moment. The System message dialogue box will pop up after the system finishes reading. Tap OK.
Test Standard Interface Communication
Before testing the Standard Interface communication between the robot and the vision system, make sure that the interface service is started. Then, run a test program on the teach pendant to test the Standard Interface communication.
-
Turn the key of the teach pendant to AUTO (the automatic mode).

-
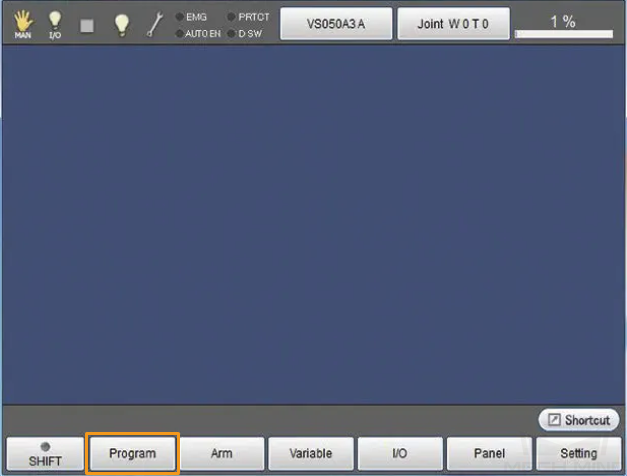
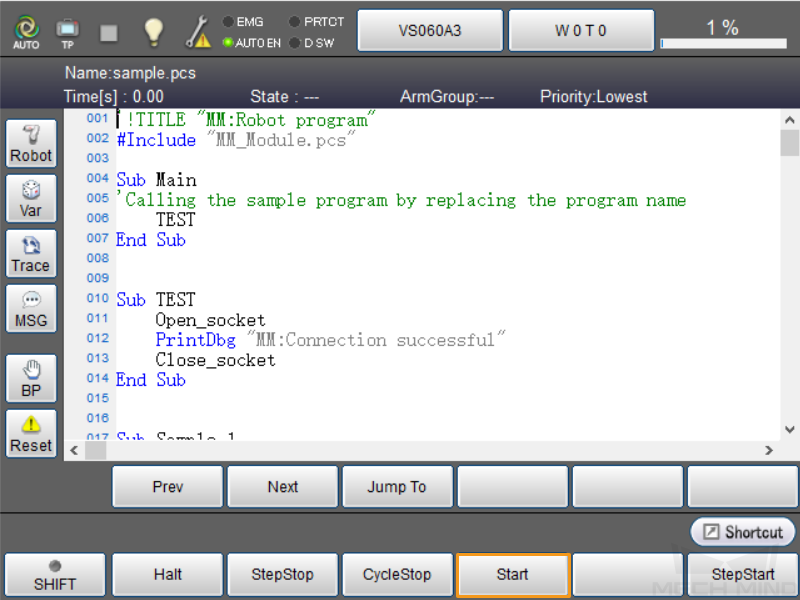
Tab Program on the main interface of the teach pendant.
-
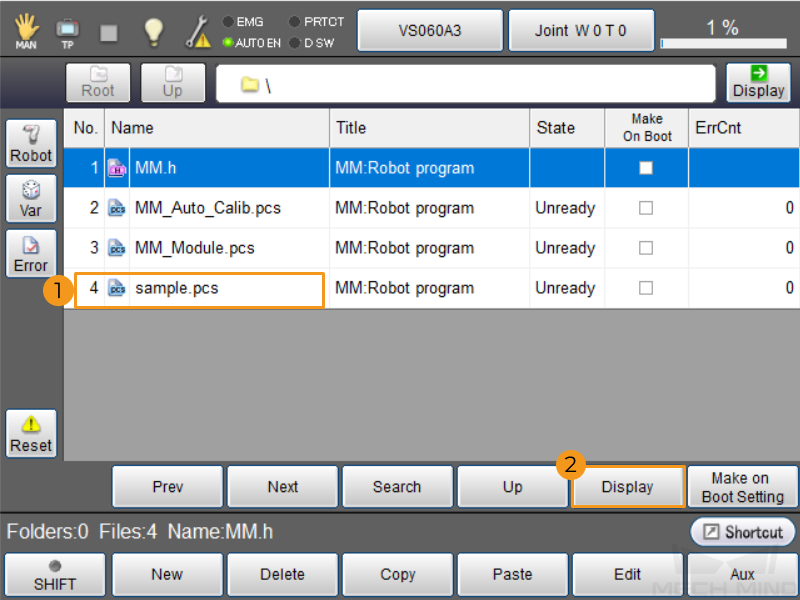
Select sample.pcs on the program list. Then, tab Display.
-
Tab Start on the interface.
-
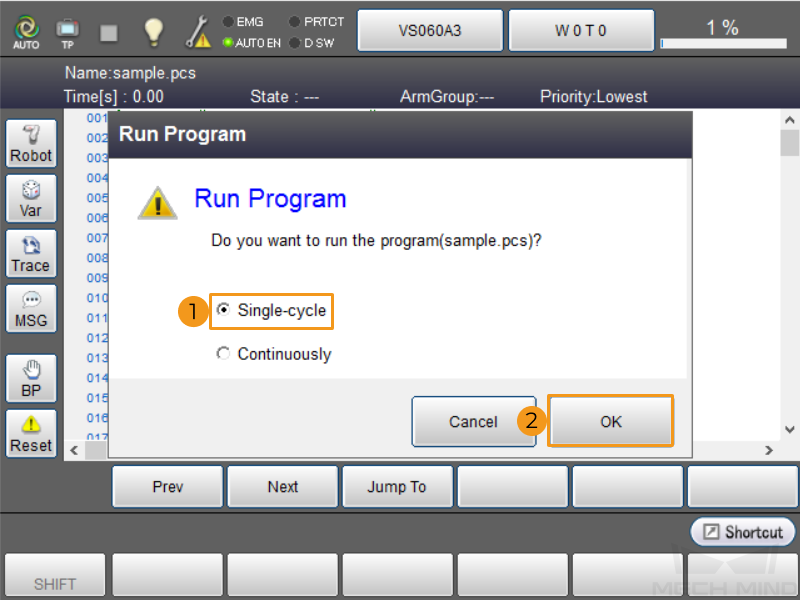
In the pop-up Run Program dialogue box, select Single-cycle, and then tab OK.
-
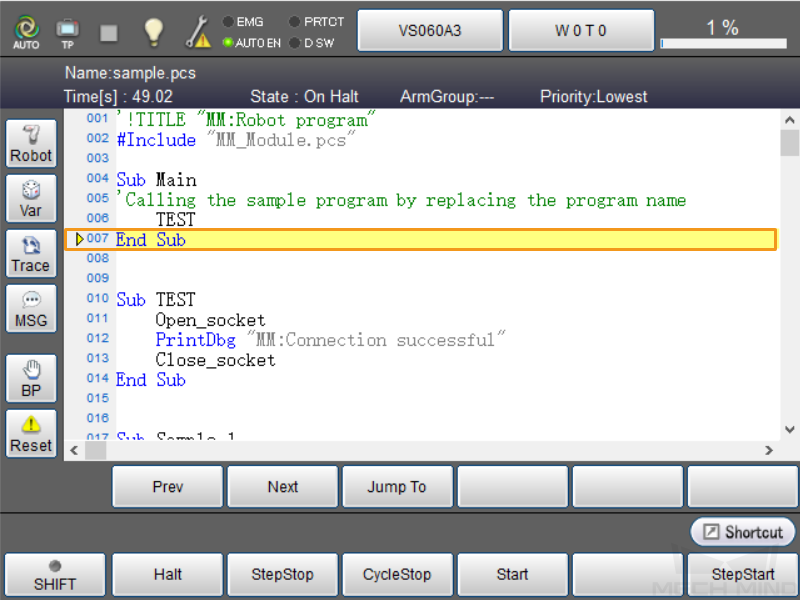
If Standard Interface communication between the robot and Mech-Vision is set up successfully, the arrow will stay at the End Sub line.
-
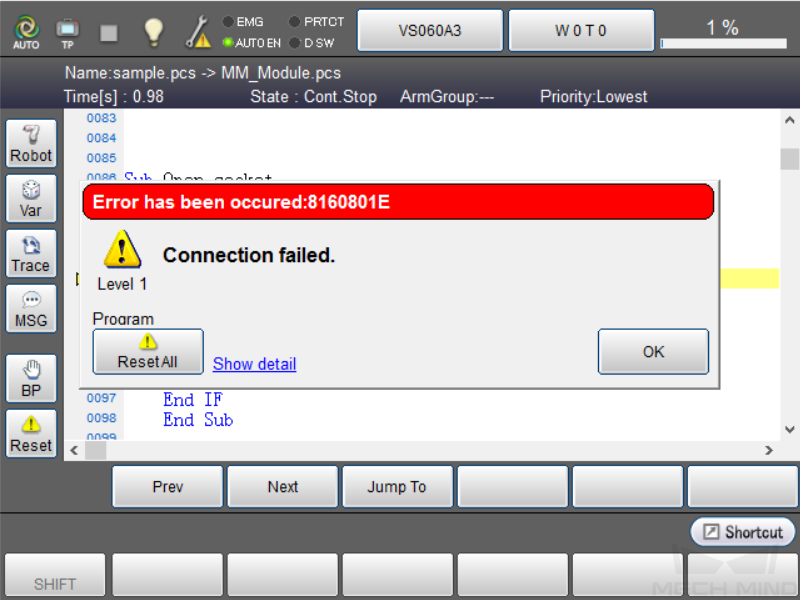
If the Standard Interface connection fails, the error information Connection failed will pop up in the teach pendant. Please troubleshoot communications problems.