DOBOT
This guide shows you how to set up Master-Control communication with a DOBOT robot.
Check Controller and Software Compatibility
-
Controller software version : 3.5.2 or above.
-
Mech-Mind Software Suite version: 1.6.0 or above.
Set up the Network Connection
Connect the Hardware
Plug one end of the Ethernet cable into the network port of the IPC and the other end into the network port of the robot controller.
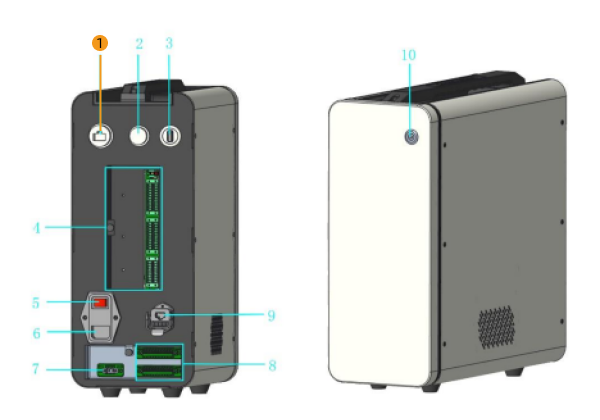
① is the network port of the robot controller.
Set the IP Address
To allow communication between the IPC and the robot controller, the IPC’s network port connected to the robot controller should be in the same subnet as the robot. This means that the network portions and subnet masks of the IP addresses should be the same. For example, 192.168.100.1/255.255.255.0 and 192.168.100.2/255.255.255.0 are in the same subnet.
-
Set Camera IP Address.
-
Set Robot IP address.
-
If the robot controller software is DobotSCStudio, set the IP address according to the following steps.
In DobotSCStudio, go to .
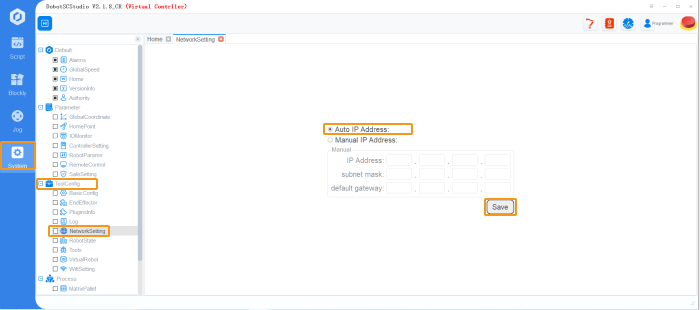
If the IP address isn’t in the same subnet as the IPC, select Manual IP Address and set the IP address manually, and click Save . -
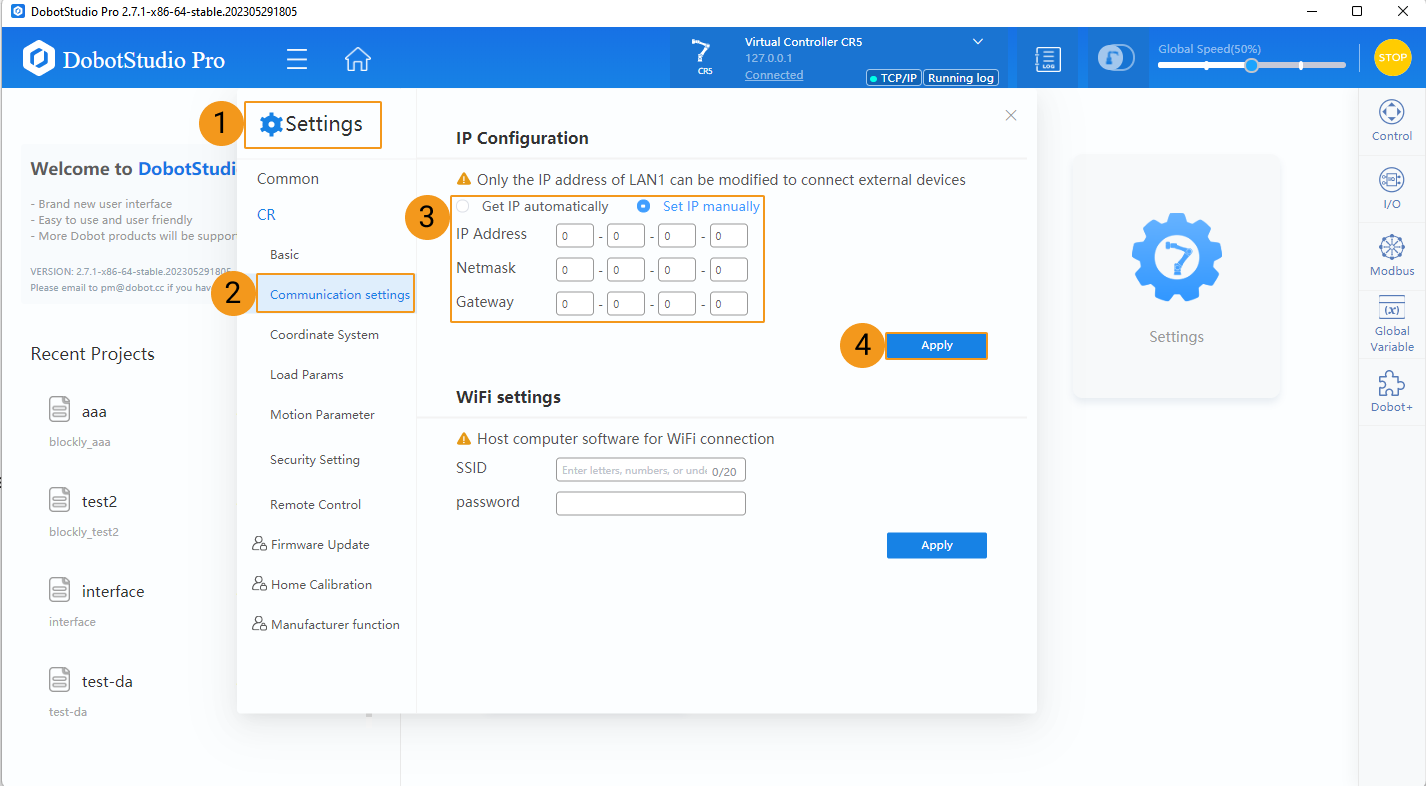
If the robot controller software is DobotStudio, set the IP address according to the following steps.
In DobotStudio, go to , enter the IP address, netmask and default gateway, and click Apply.
-
Cautions
-
Do NOT use Mech-Viz and DobotSCStudio/DobotStudio software at the same time. Otherwise Mech-Viz may not connect to the robot properly.
-
Do not use Mech-Viz when operating the teach pendant.
-
It is suggested to remove the Wi-Fi USB device connected to the controller since the device may affect remote control.
-
When master-controlling the DOBOT robot, Mech-Viz does not support setting the robot’s TCP during the project. Therefore, please make sure that the TCP value on the robot side is consistent with the TCP set in Mech-Viz. Otherwise, the real robot’s linear move path will differ from the planned path of Mech-Viz. Users can perform the following steps to make the TCP values consistent:
-
Modify the TCP value on the robot side manually to match the TCP set in Mech-Viz;
-
Move the Robot;
-
Reconnect the robot to Mech-Center.
-
-
The DI value of the DOBOT robot is one greater than that in Mech-Viz. For example, DI1 of the real robot corresponds with DI0 in Mech-Viz.
Test Robot Connection
Please refer to Test Robot Connection.