AUBO
This guide shows you how to set up Master-Control communication with an AUBO robot.
Check Controller Compatibility
The version of the controller should be above 4.5.44. If the version is lower, please contact AUBO after-sales support for a system version upgrade.
Go to , check the version of the controller in Server Version.
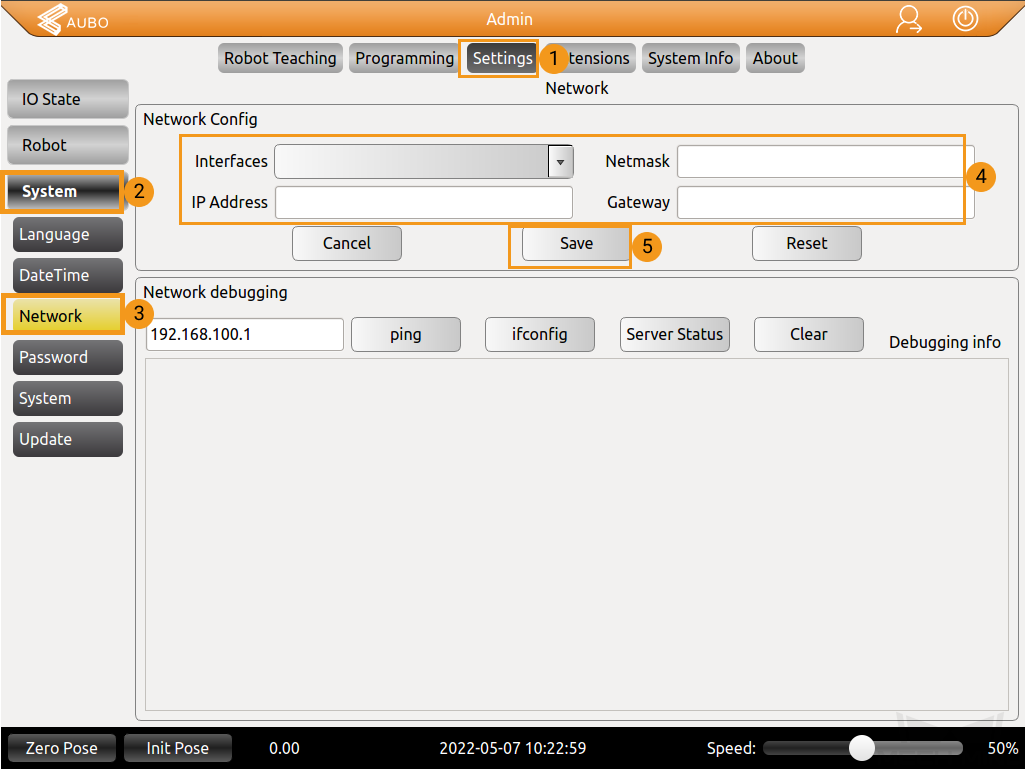
Set up the Network Connection
Test Robot Connection
Please refer to Test Robot Connection.
Troubleshooting
If the robot cannot be connected successfully, and the error is DLL load failed: %1 is not a valid Win32 application , please check whether the C runtime library on your computer is complete. The complete C runtime library is shown below.
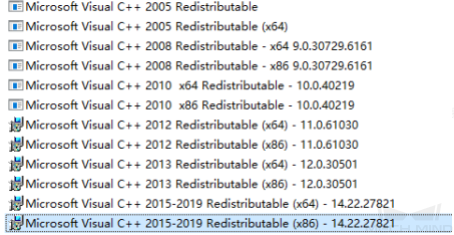
If the library is not complete, please download the vc runtime library repair DirectX Repair V3.9 to fix the error.