Kawasaki Automatic Calibration
This topic introduces the process of automatic calibration via Standard Interface communication between the Kawasaki robot and Mech-Mind Vision System.
Preparation before Calibration
Make preparation before calibration according to the camera mounting method. You may refer to the links below.
-
If the camera is mounted in the Eye to Hand method, refer to Preparation before Calibration in Automatic Calibration in the Eye-to-Hand Setup.
-
If the camera is mounted in the Eye in Hand method, refer to Preparation before Calibration in Automatic Calibration in the Eye-in-Hand Setup.
Pre-calibration Configuration
-
Open Mech-Vision, and click the Camera Calibration (Standard) button in the toolbar. The Configuration before Calibration window will be prompted.
-
In the Select how to calibrate window, select the New calibration radio button, and then click the Next button.
-
In the Select calibration task window, select Hand-eye calibration for listed robot from the drop-down list box, click the Select robot model button to select the robot model used by the project, and then click the Next button.
-
In the Select camera setup window, select the camera mounting method in this project, and then click the Next button.
-
In the Calibration method and robot control window, select Automatic and Standard Interface, and then click the Next button.
-
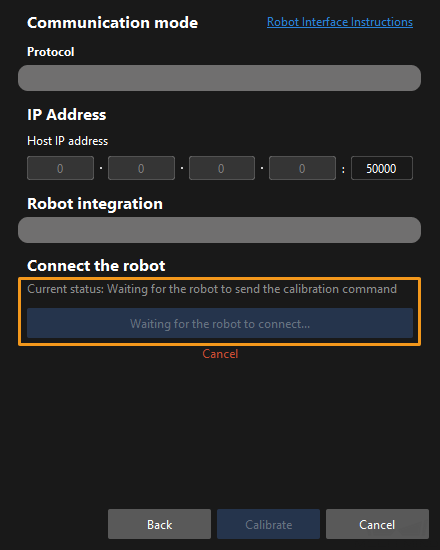
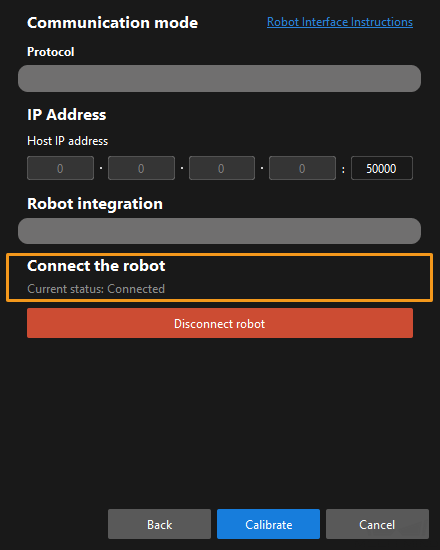
In the Communication mode window, keep the default value of Protocol. Click the Start interface service button in the Connect the robot area, and the message on this button will change to Waiting for the robot to connect....
-
The port number for the Host IP address parameter is 50000 by default. If the port number determined in the communication solution is not 50000, please change it as required.
-
After finishing the previous steps, do not close the Configuration before Calibration window.
-
Select and Modify Calibration Program
| Before starting, ensure that you have set up Standard Interface communication. |
-
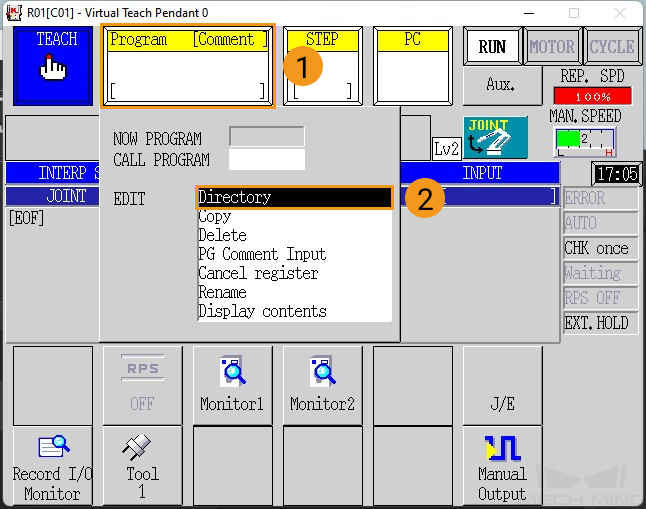
Press the program area in the teach mode. Select Directory in the pop-up menu.
-
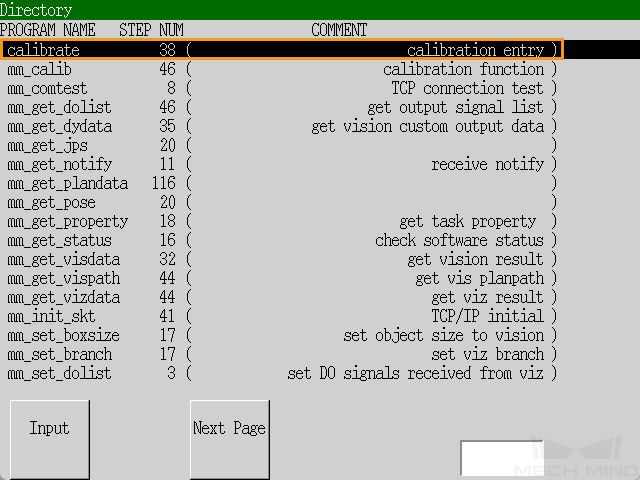
Select the foreground program calibrate in the directory, and press ENTER on the teach pendant to confirm.
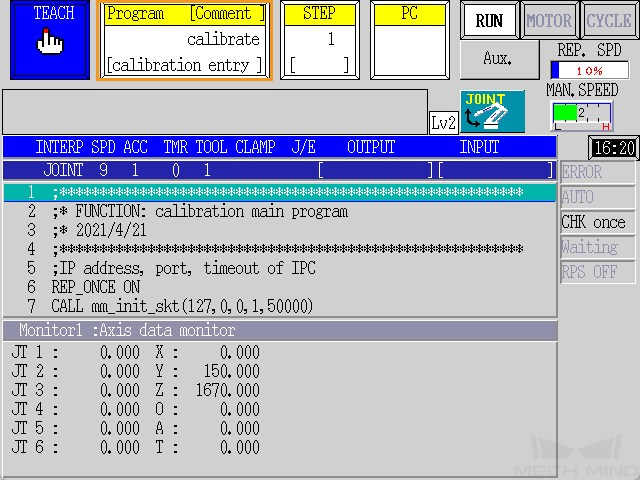
The following figure shows the interface after the program has been added.
-
Modify the parameters of the mm_init_skt function in the calibrate program following the steps below.
-
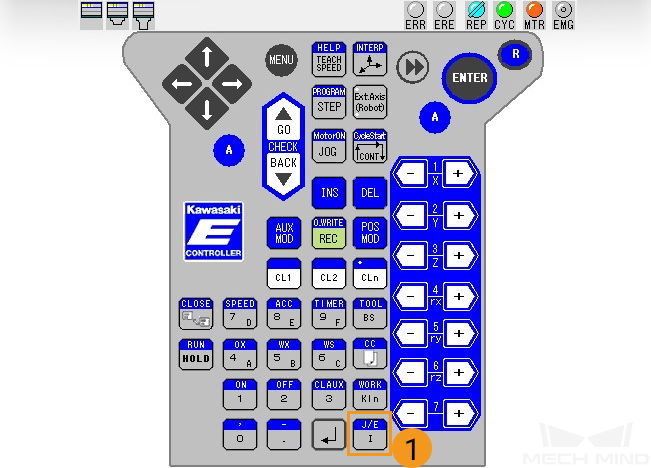
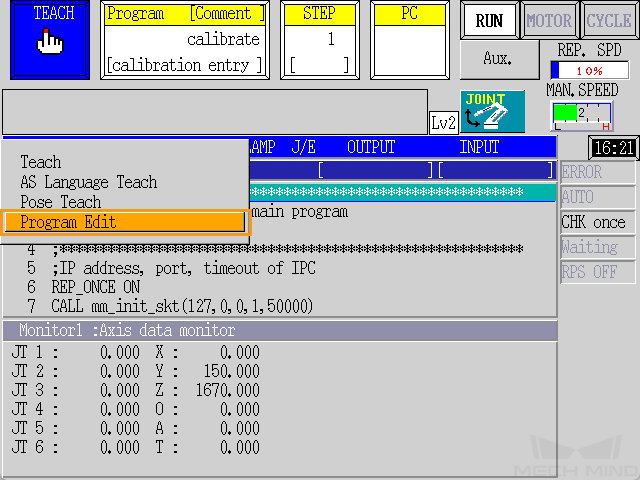
Press J/E on the teach pendant, select Program Edit in the pop-up menu, and then press ENTER to confirm.
-
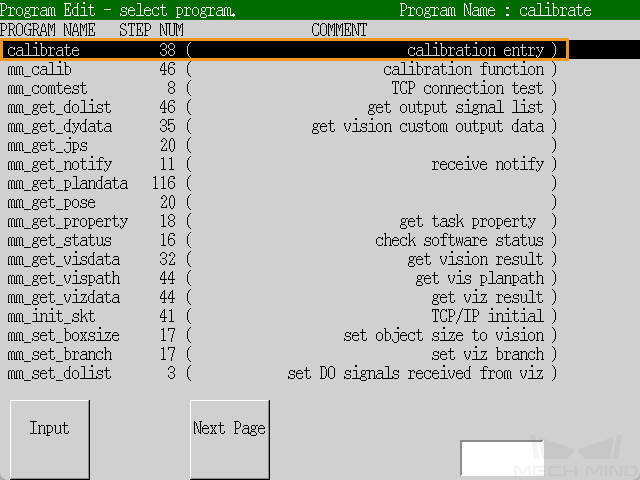
Select calibrate in the program directory, and press ENTER to confirm.
-
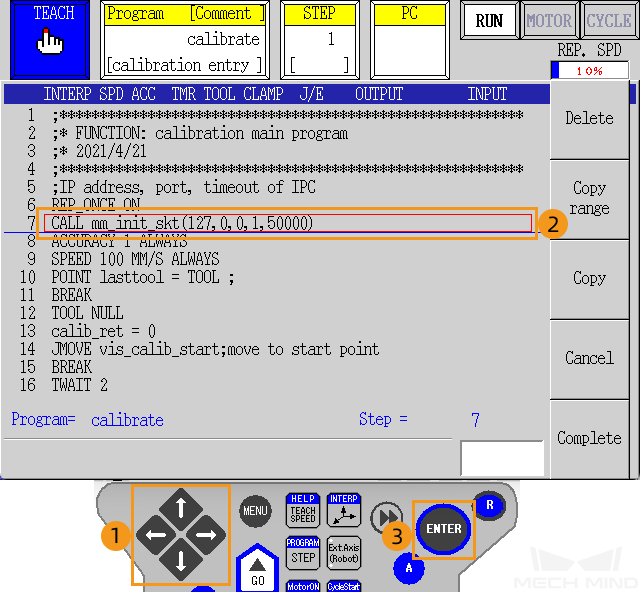
Move the red selection frame with the arrow keys on the teach pendant to select call mm_init_skt(127,0,0,1,50000). Then, press ENTER to confirm.
-
Move the cursor to needed positions with the arrow keys on the teach pendant to change the settings: change “127,0,0,1” to the IP address of the IPC, and “50000” to the host port number set in Mech-Vision. After modifying, press ENTER to confirm and then press R to exit.

-
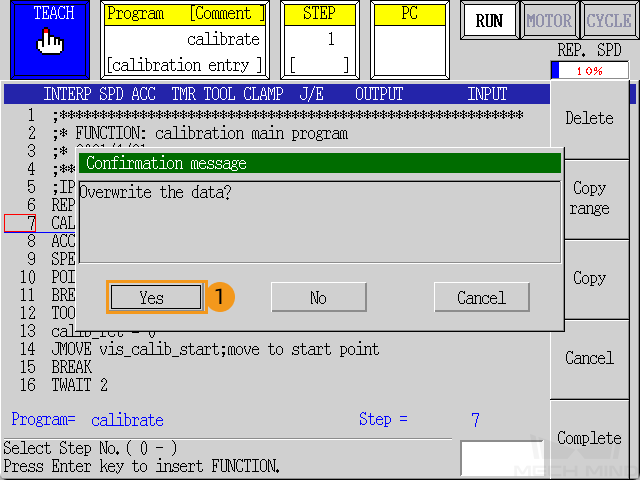
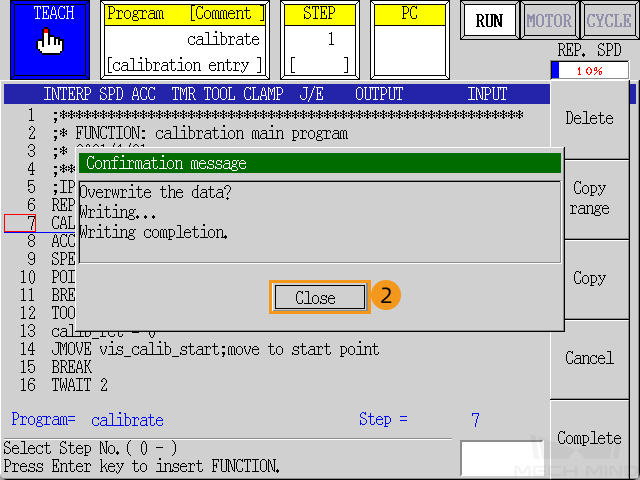
In the prompted Confirm window, press Yes, and then press Close.
-
Teach the Calibration Start Point
-
Move the robot to the start point for calibration.
-
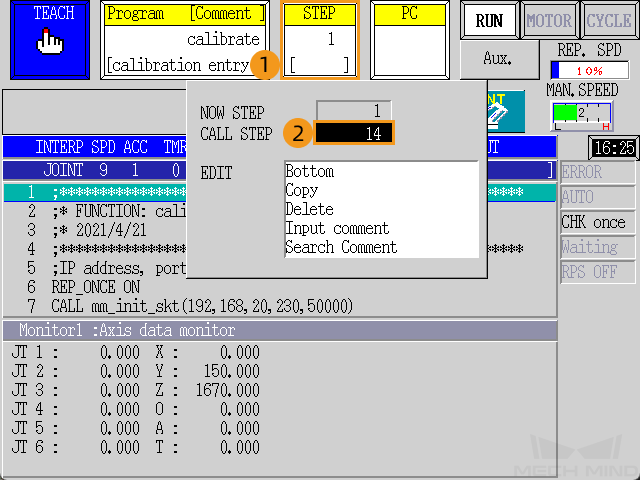
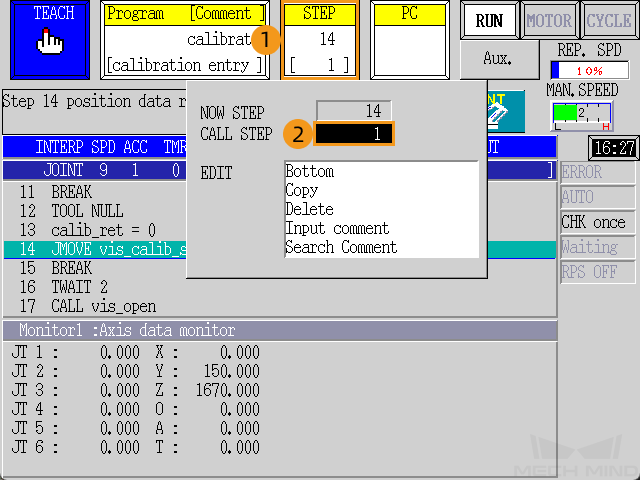
Select the STEP area and enter the line number of the line containing “JMOVE vis_calib_start;” (for example, 14). Press ENTER to select the line.
-
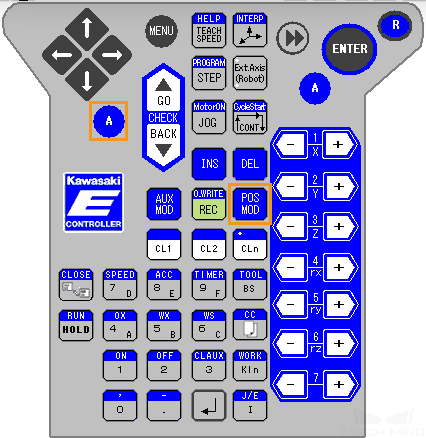
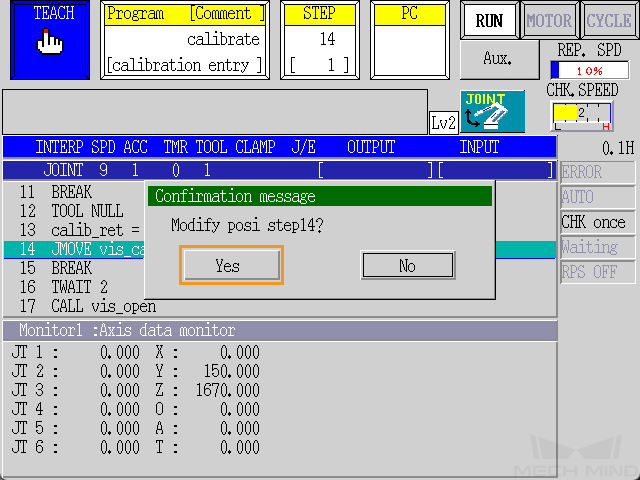
Then, press A and POS MOD together on the teach pendant.
-
Select Yes in the dialogue box to store the robot’s current pose, which can be directly used as the calibration start point, to the pose variable vis_calib_start.
Run the Calibration Program
-
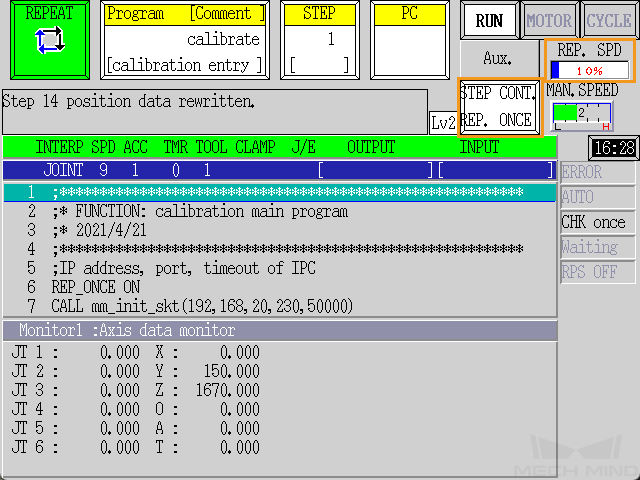
Press the STEP area, enter 1 by using the number key, and then press ENTER to run the program from the first line.
-
Switch Teach/Repeat on the controller to REPEAT, and switch the teach lock on the teach pendant to OFF. After these operations, the robot should be in the REPEAT mode.

-
Switch to the mode STEP CONT. REP. ONCE, and modify the value of REP. SPD to 10%.
-
Hold A on the keypad and press MOTOR on the screen to make MOTOR lit. Hold A on the keypad and press CYCLE on the screen to make CYCLE lit. If RUN is not lit, press A and RUN/HOLD together on the teach pendant.
When RUN, MOTOR, CYCLE are all lit, the program starts to run. 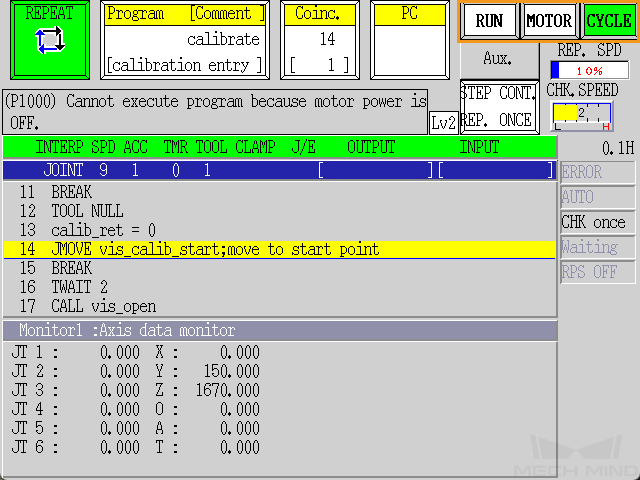
-
When, in the Configuration before Calibration window in Mech-Vision, the current status changes to connected and the button “Waiting for the robot to connect” changes to “Disconnect”, click Calibrate. The Calibration (Eye to hand) window will be prompted.
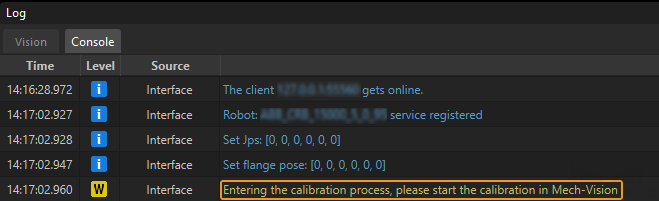
If the robot is connected successfully, the Console tab of Mech-Vision Log panel will display a log.
Calibration Procedure
Conduct calibration according to the camera mounting method. You may refer to the links below.
-
If the camera is mounted in the Eye to Hand method, refer to Calibration Procedure in Automatic Calibration in the Eye-to-Hand Setup.
-
If the camera is mounted in the Eye in Hand method, refer to Calibration Procedure in Automatic Calibration in the Eye-in-Hand Setup.
Change the Extrinsic Parameter File
If the camera’s extrinsic parameter file has been used by a Mech-Vision project, you need to change the extrinsic parameter file used by the Mech-Vision project to a new one after you finish the hand-eye calibration.
-
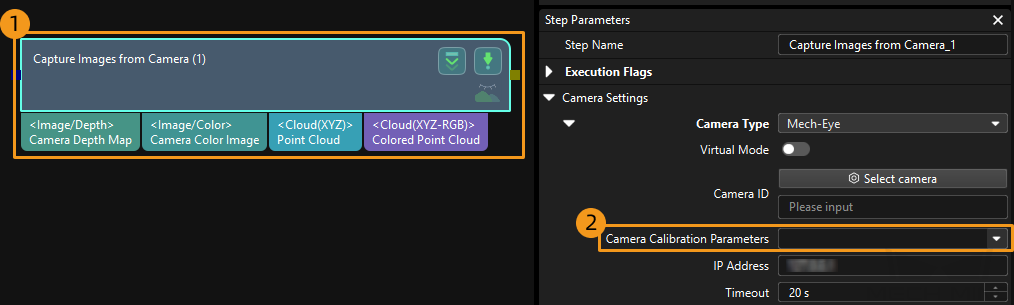
Select the Capture Images from Camera Step.
-
In the Step Parameters panel, click
 of the Camera Calibration Parameters parameter, and select the newly calibrated extrinsic parameter file.
of the Camera Calibration Parameters parameter, and select the newly calibrated extrinsic parameter file.
Calibration-Related Status Codes
During automatic calibration via Standard Interface communication, the vision system returns data together with the status code to the robot. Status codes, which are categorized into error codes and normal status codes, indicate the command execution status. Calibration related status codes are listed in the tables below.