JAKA Example Program
This topic introduces the example programs that perform an actual pick-and-place task.
Example Programs
Please make sure that you have loaded the example programs.
The example programs are as follows.
Obtain Vision Result from Mech-Vision
In the Programming control window, drag the instructions in sequence as shown below, or open the loaded mm_vis_sample program.
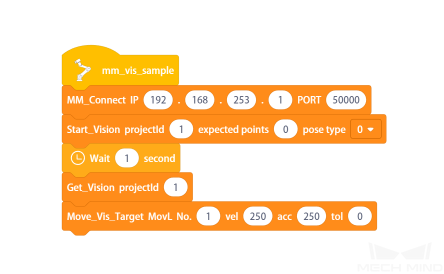
Program Description
-
The program name is mm_vis_sample.
-
Connect the robot with the IPC. You should set the IP address and port number of the IPC. Please refer to MM_Connect for details.
-
Start Mech-Vision project. You should set the project ID, number of poses you expect to receive, and the type of the pose that robot sends to Mech-Vision. Please refer to Start_Vision for details.
-
Wait for one second to prevent the robot from shaking and therefore the image-capturing process will not be affected.
-
Receive the vision result from the Mech-Vision project. You should set the project ID. Please refer to Get_Vision for details.
-
Move the robot to the vision point received from Mech-Vision. You can set a waypoint to which the robot should move, the velocity, acceleration during moving, and the tolerance of the waypoint. Please refer to Move_Vis_Target for details.
Obtain Planned Path from Mech-Viz
In the Programming control window, drag the instructions in sequence as shown below, or open the loaded mm_viz_sample program.
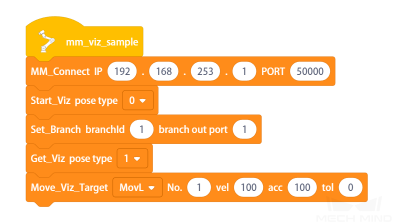
Program Description
-
The program name is mm_viz_sample.
-
Connect the robot with the IPC. You should set the IP address and port number of the IPC. Please refer to MM_Connect for details.
-
Start the Mech-Viz project. You should set the type of pose that the robot sends to Mech-Viz. Please refer to Start_Viz for details.
-
Select the branch along which the project should proceed. You should set the Step ID of the Branch by Msg Step and the exit port number. Please refer to Set_Branch for details.
-
Receive the data from Mech-Viz. You should set the type of the returned waypoint pose. Please refer to Get_Viz for details.
-
Move the robot to the waypoint in the path planned by Mech-Viz. You can set a waypoint to which the robot should move, the velocity, acceleration during moving, and the tolerance of the waypoint. Please refer to Move_Viz_Target for details.
Obtain Planned Path from Mech-Vision
In the Programming control window, drag the instructions in sequence as shown below, or open the loaded mm_vispath_sample.
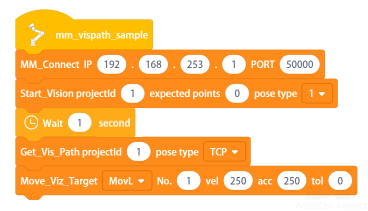
Program Description
-
The program name is mm_vispath_sample.
-
Connect the robot with the IPC. You should set the IP address and port number of the IPC. Please refer to MM_Connect for details.
-
Start Mech-Vision project. You should set the project ID, number of poses you expect to receive, and the type of the pose that robot sends to Mech-Vision. Please refer to Start_Vision for details.
-
Wait for one second to prevent the robot from shaking and therefore the image-capturing process will not be affected.
-
Receive the path planned by the “Path Planning” Step from the Mech-Vision project. You should set the project ID and the type of the returned waypoint pose. Please refer to Get_Vis_Path for details.
-
Move the robot to the waypoint in the path planned by the project. You can set a waypoint to which the robot should move, the velocity, acceleration during moving, and the tolerance of the waypoint. Please refer to Move_Viz_Target for details.