开始使用相机
本章将引导你完成从开箱检查到使用Mech-Eye Viewer采集图像的一系列操作。
|
图示仅供参考,产品请以实物为准。 |
1. 开箱检查
-
收到相机包装后,请确认包装完好无破损。
-
找到包装内的《包装清单》,并参照该清单检查物品和配件无缺失或损坏。
| 以下列表仅供参考,请以实际包装内的《包装清单》为准。 |
|
|
|
|
|
|
|
|
|
|
M4 × 8内六角圆柱头螺钉,8颗 |
M5 × 8内六角圆柱头螺钉,8颗 |
M8 × 20内六角圆柱头螺栓,2颗 |
M8 × 20 T型螺栓,2颗 |
|
|
M8螺母,2颗 |
M8法兰螺母,2颗 |
|
|
M8垫片,2片 |
Ø6 × 10定位销,4颗 |
线缆固定架,1个 |
扎带,50条 |
|
|
标定板(仅UHP-140) |
|
|
|
|
除了相机包装外,你还可能收到如下可选配件(如选购):
|
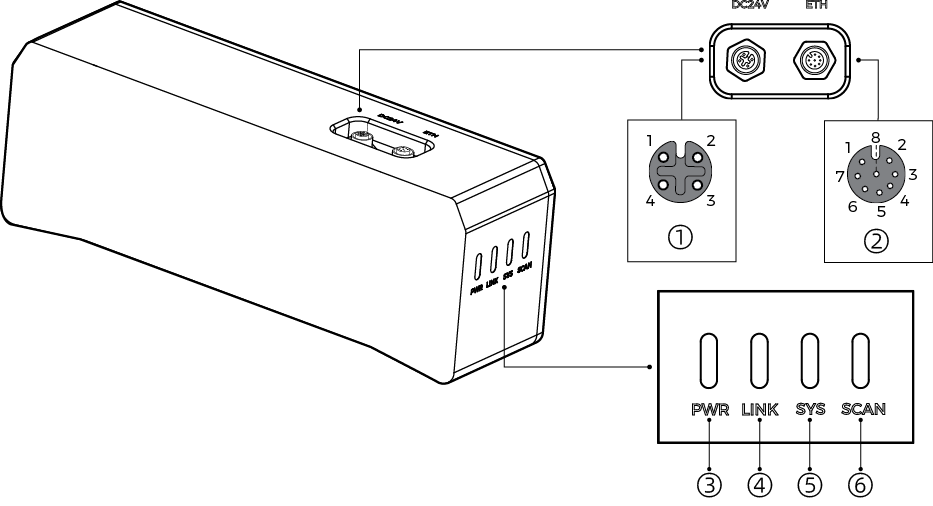
2. 确认接口及指示灯
请对照以下图片及表格,确认相机上各接口及指示灯的功能。
2.1. DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M和UHP-140
序号 |
名称 |
功能 |
|
|---|---|---|---|
① |
DC 24V电源接口 |
1: GND |
3: 24V DC |
2: GND |
4: 24V DC |
||
② |
ETH网口 |
1: MD3_P |
5: MD1_P |
2: MD2_N |
6: MD0_N |
||
3: MD2_P |
7: MD3_N |
||
4: MD0_P |
8: MD1_N |
||
③ |
PWR指示灯 |
熄灭:电源未连接 |
|
绿灯常亮:电压正常 |
|||
黄色常亮:电压低于16V或高于28V |
|||
红色常亮:电压低于12V |
|||
④ |
LINK指示灯 |
熄灭:网络未连接 |
|
绿色常亮或闪烁:网络已连接 |
|||
⑤ |
SYS指示灯 |
熄灭:未启动 |
|
绿色常亮:正在启动 |
|||
绿色闪烁:正常运行 |
|||
黄色闪烁:电压不稳定或温度异常 |
|||
红色闪烁:严重异常 |
|||
⑥ |
SCAN指示灯 |
绿色常亮:正在采集和处理数据 |
|
熄灭:未在采集和处理数据 |
|||

3. 安装相机
相机可通过以下方式安装:
| 安装方式 | 要求 |
|---|---|
安装至机器人末端法兰上,随机器人移动。 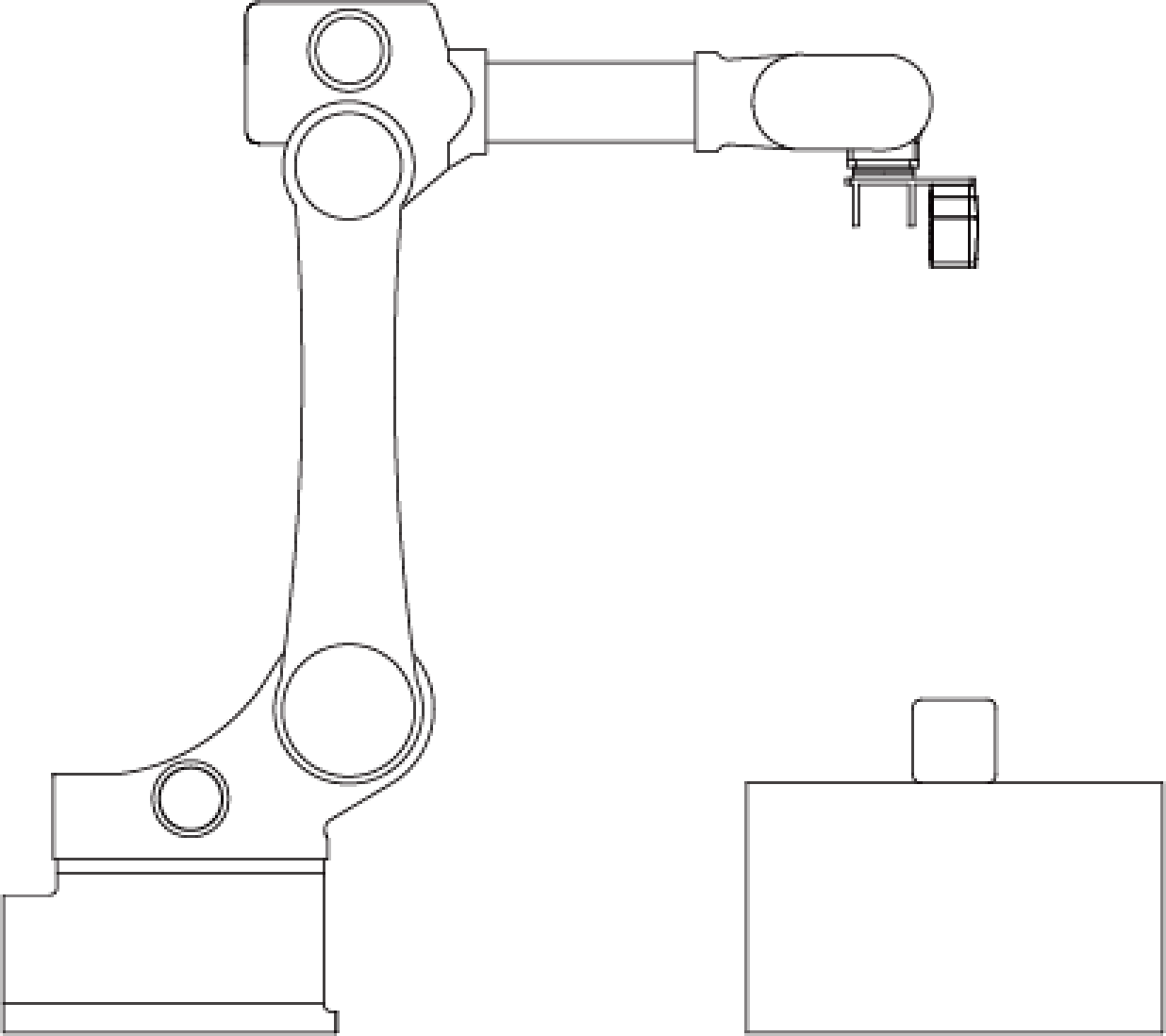
|
|
安装至固定支架上,不随机器人移动。 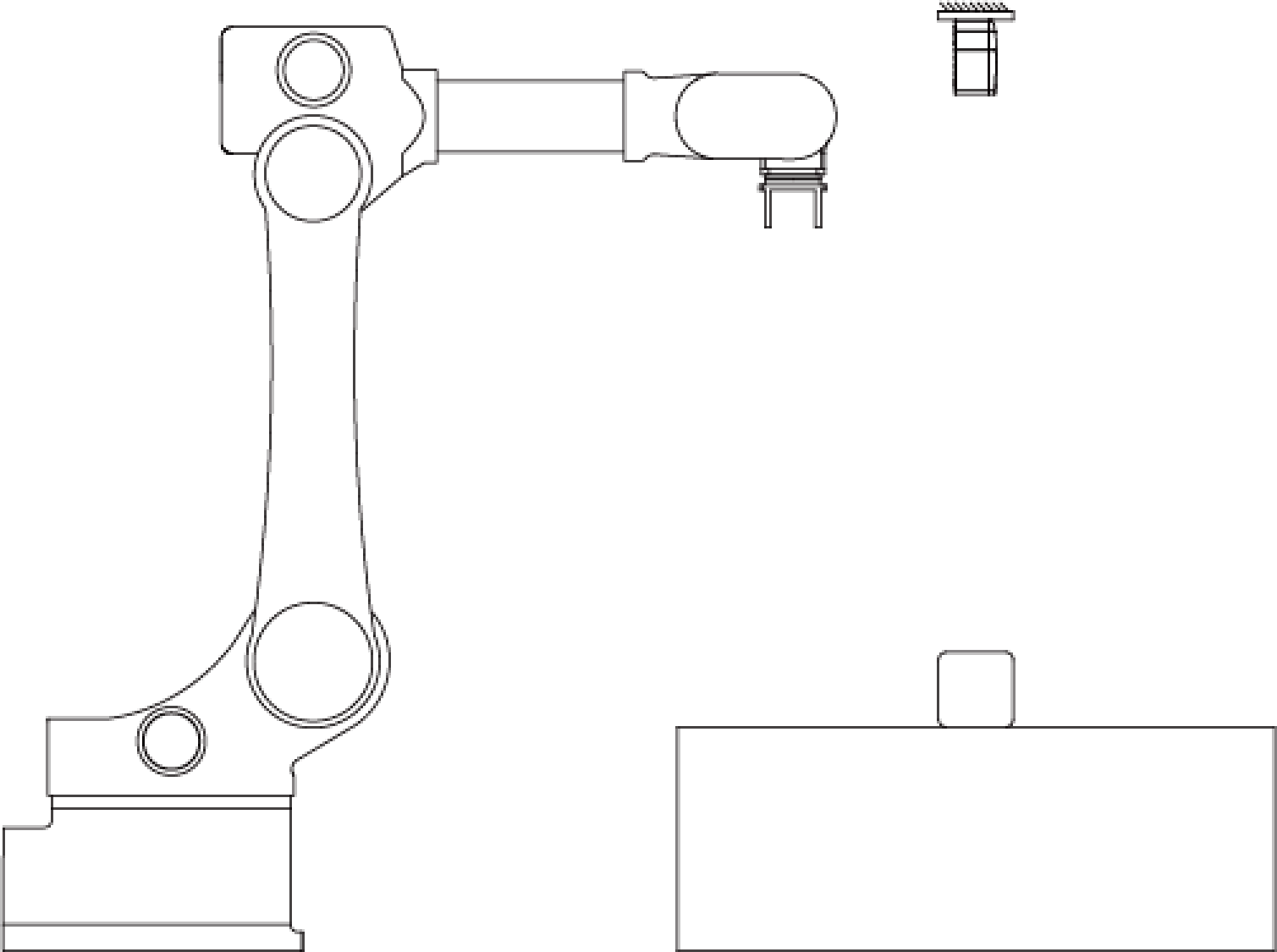
|
|
安装至滑轨上,随滑轨运动。 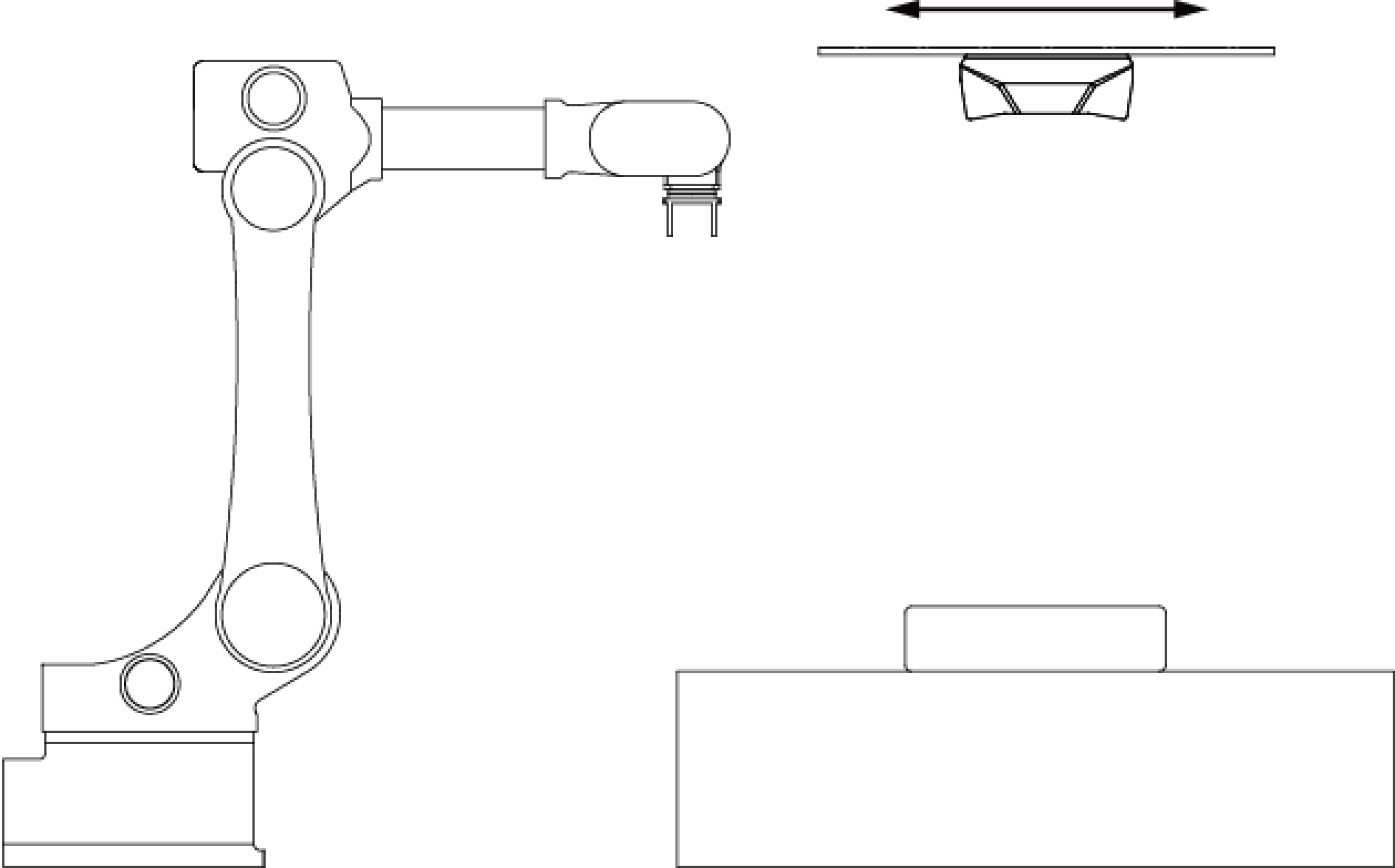
|
|
确定安装方式后,请根据以下小节,通过相机转接件或螺纹孔将相机固定至安装面上。
|
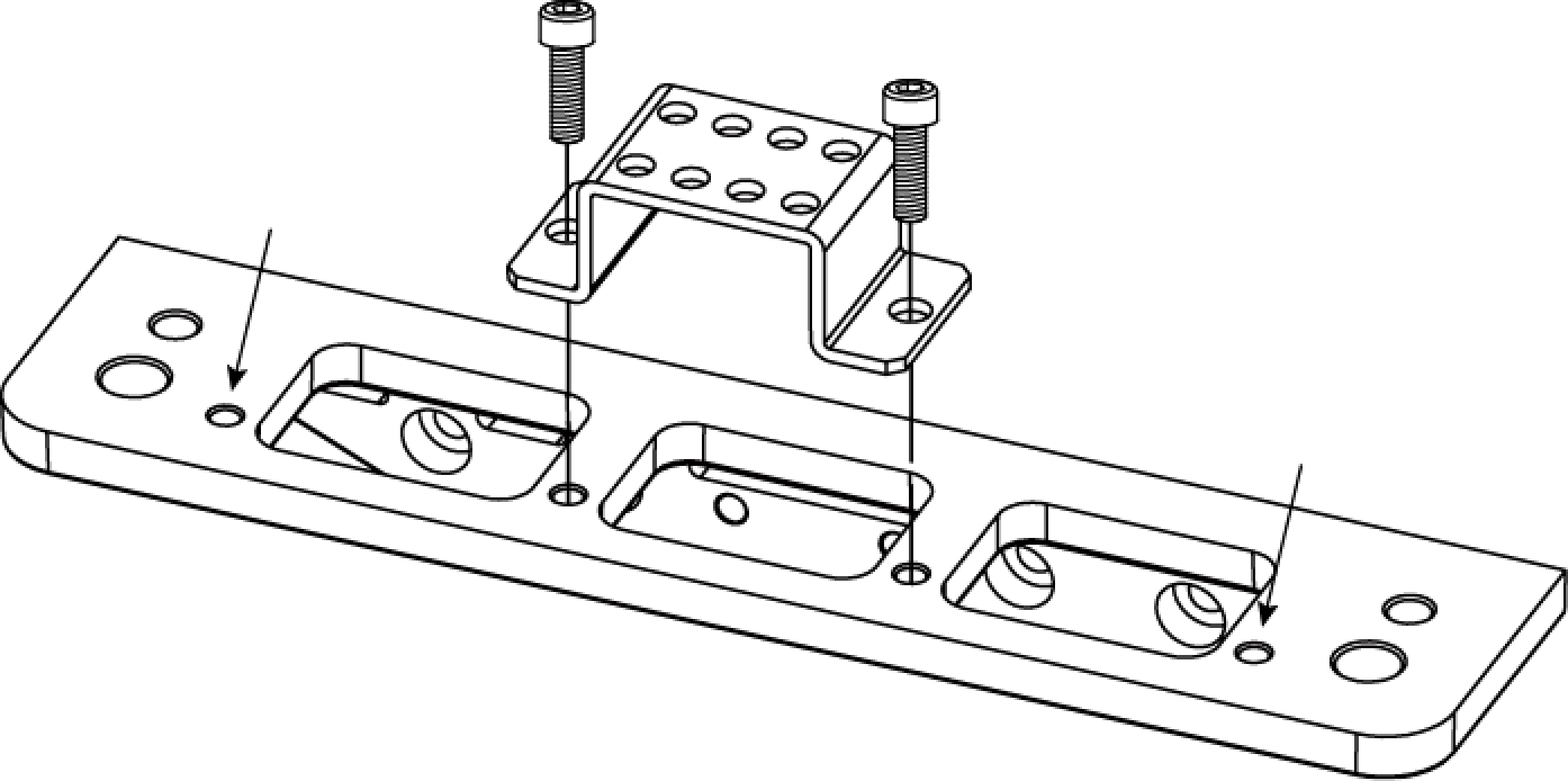
3.1. 使用相机转接件安装
使用相机转接件可将相机安装至以下两种安装面上:
-
欧标T槽铝型材
-
有安装孔的安装面
|
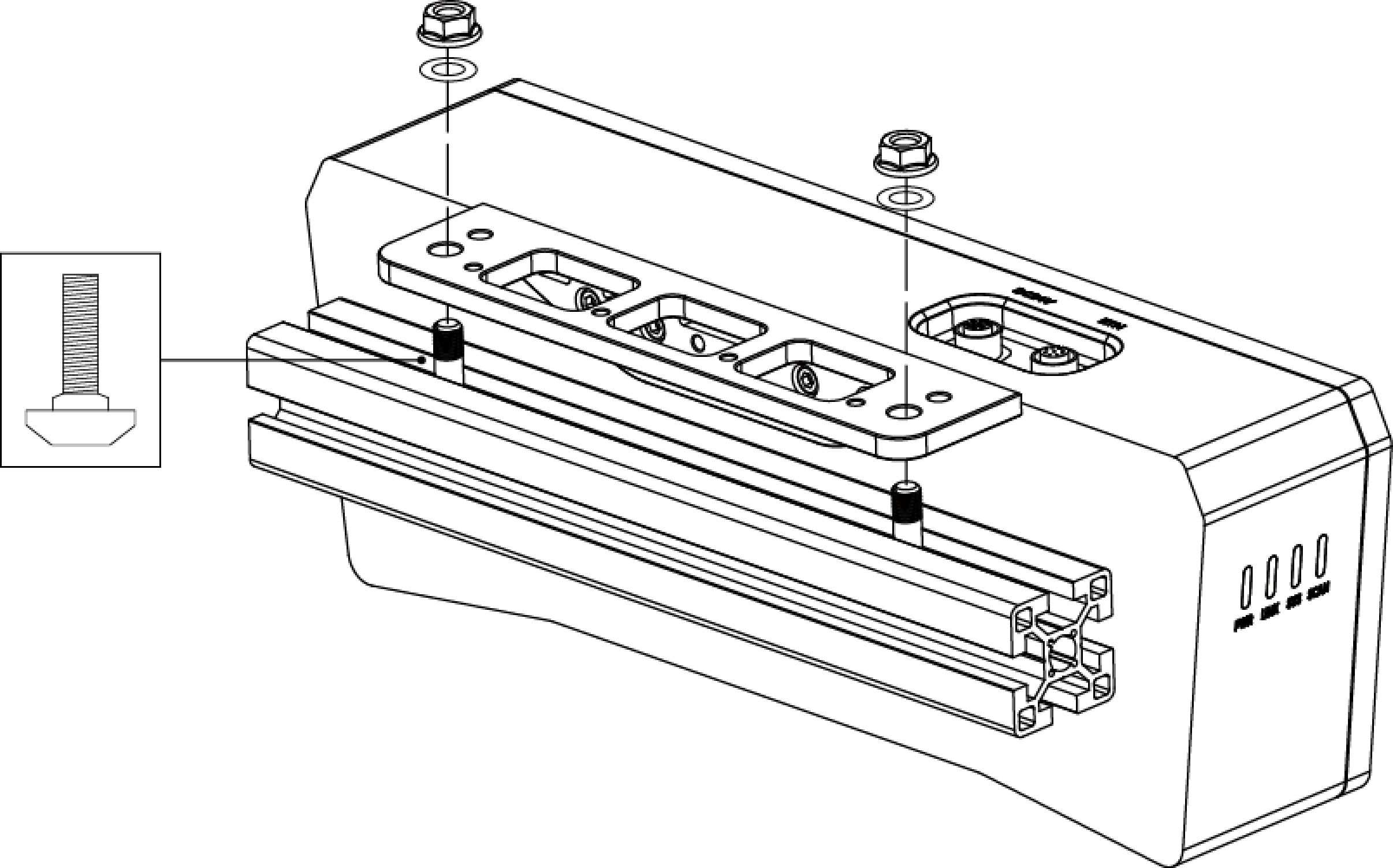
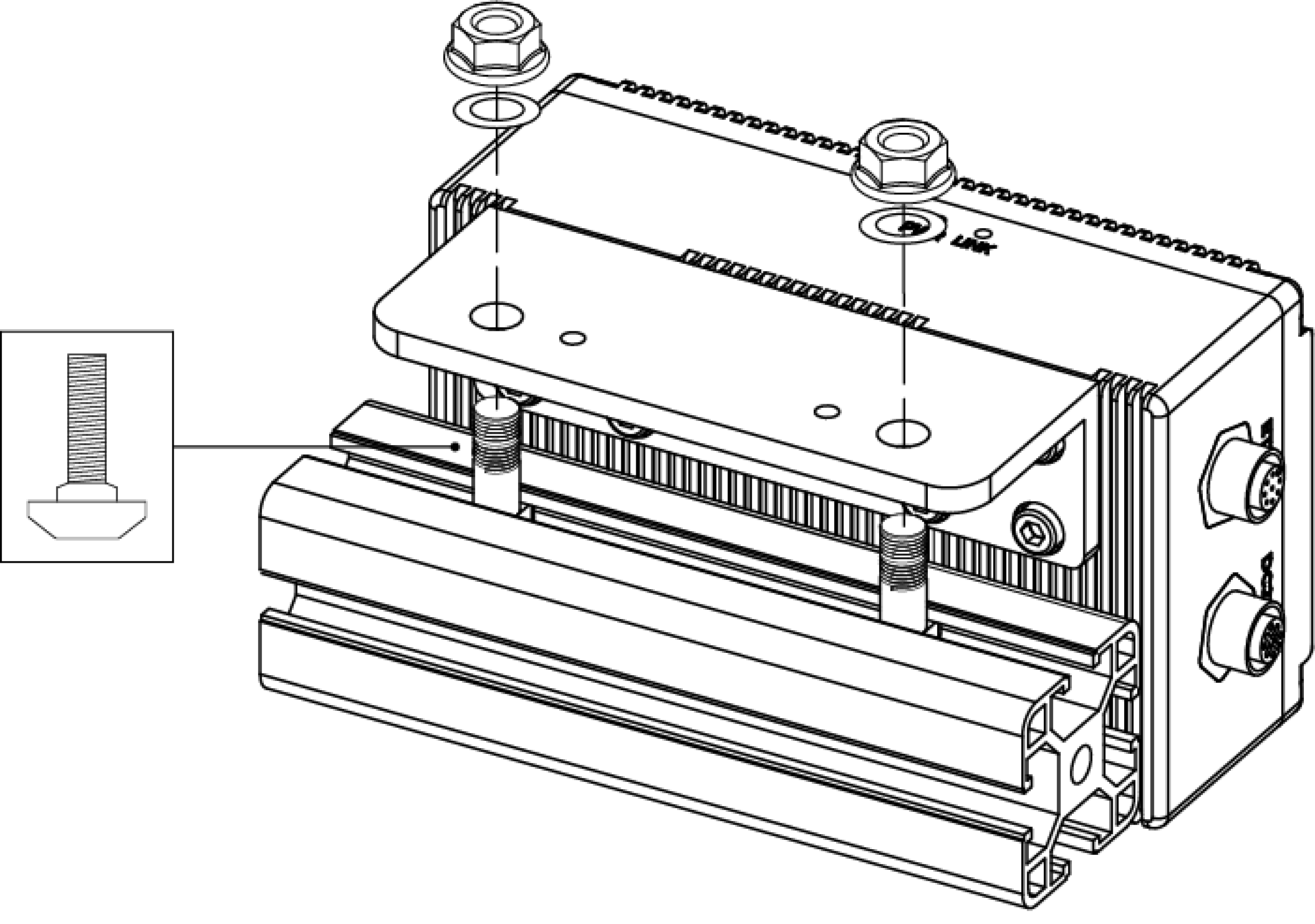
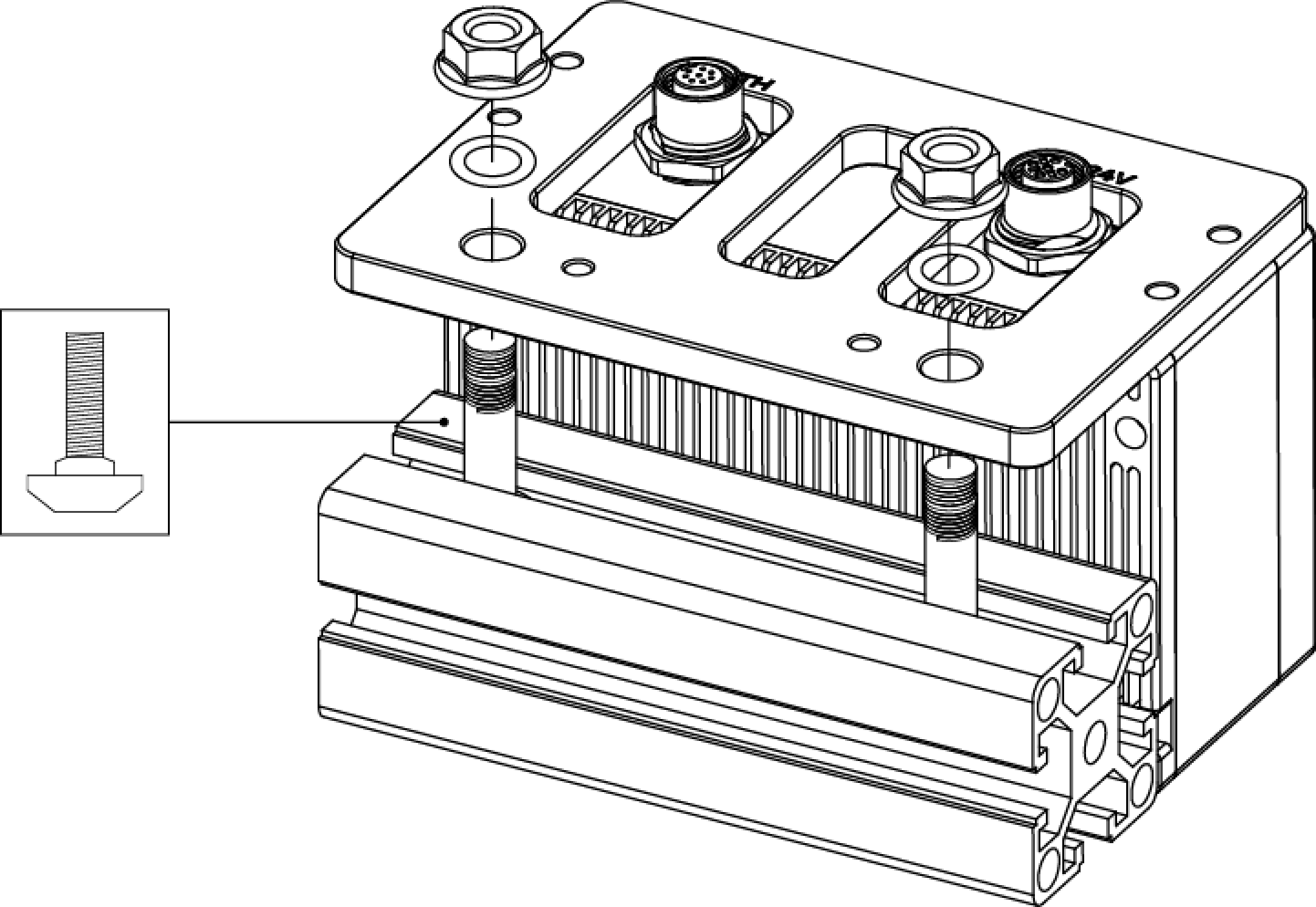
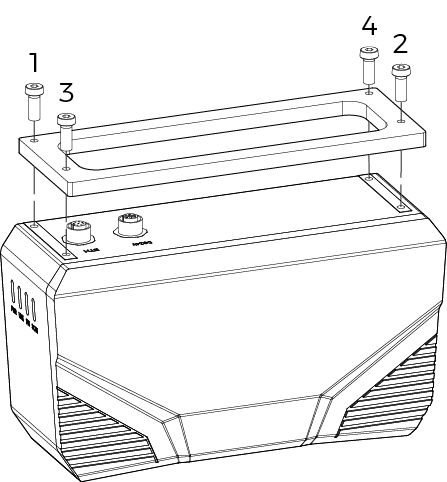
3.1.1. 安装至欧标T槽铝型材
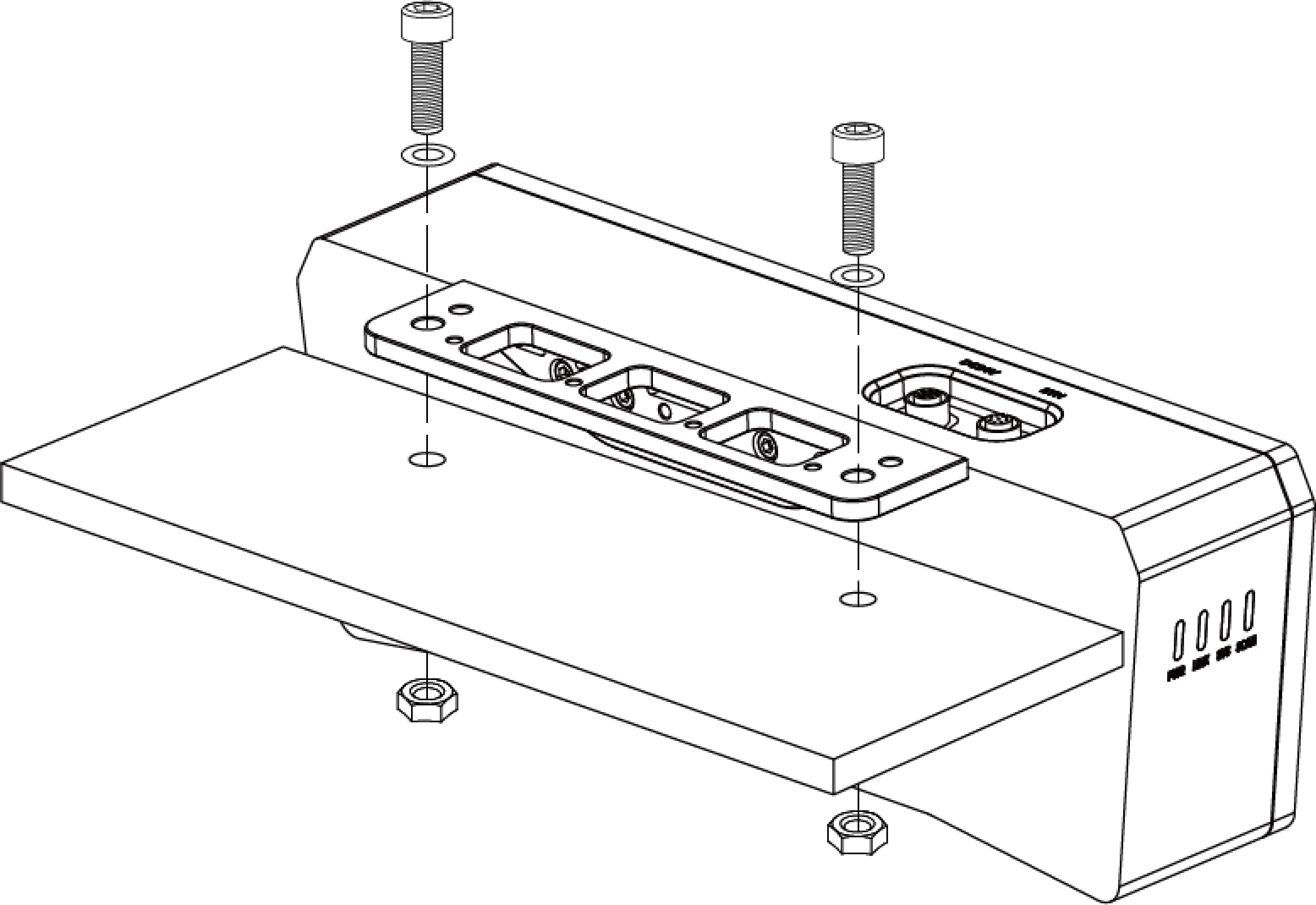
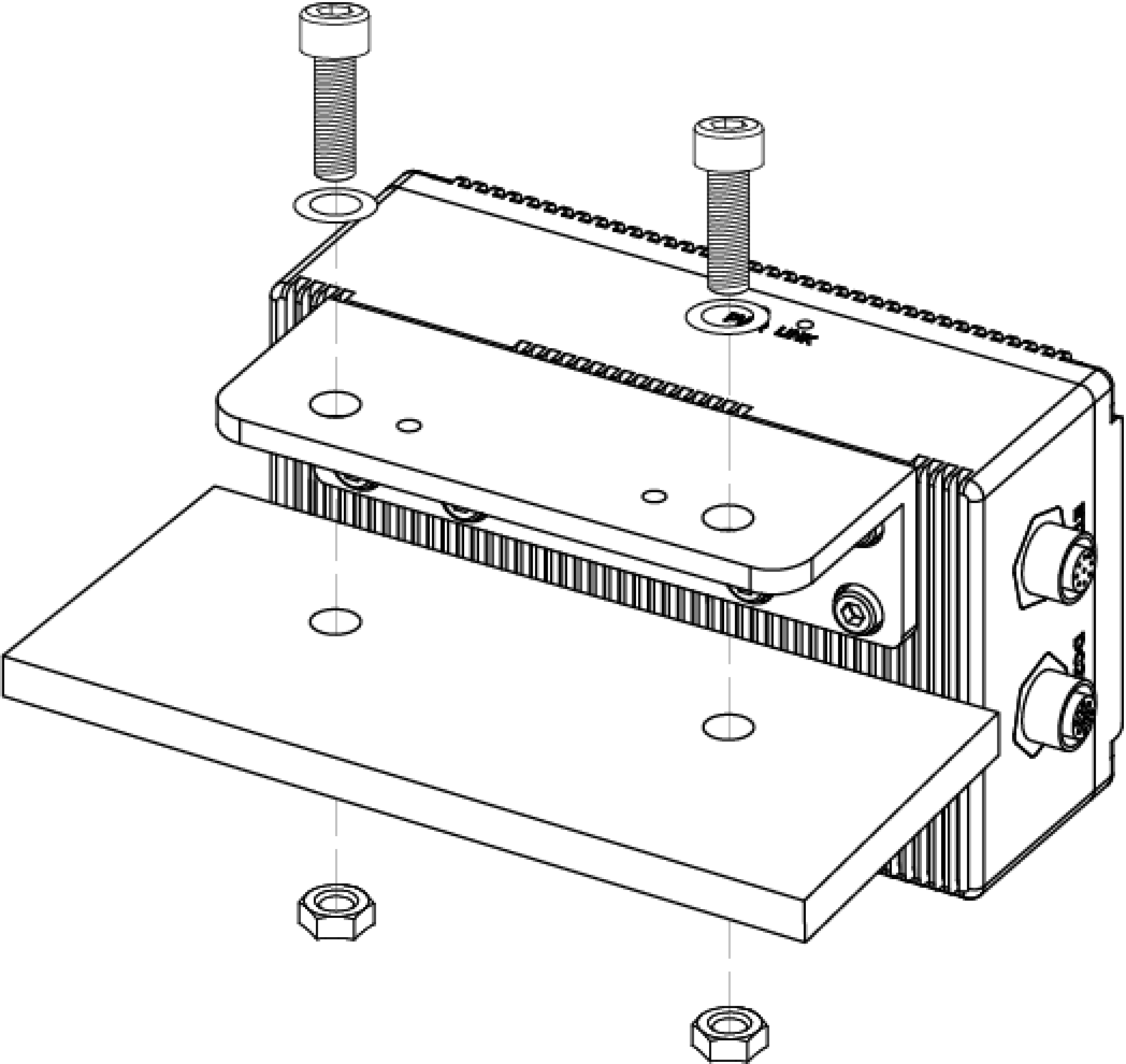
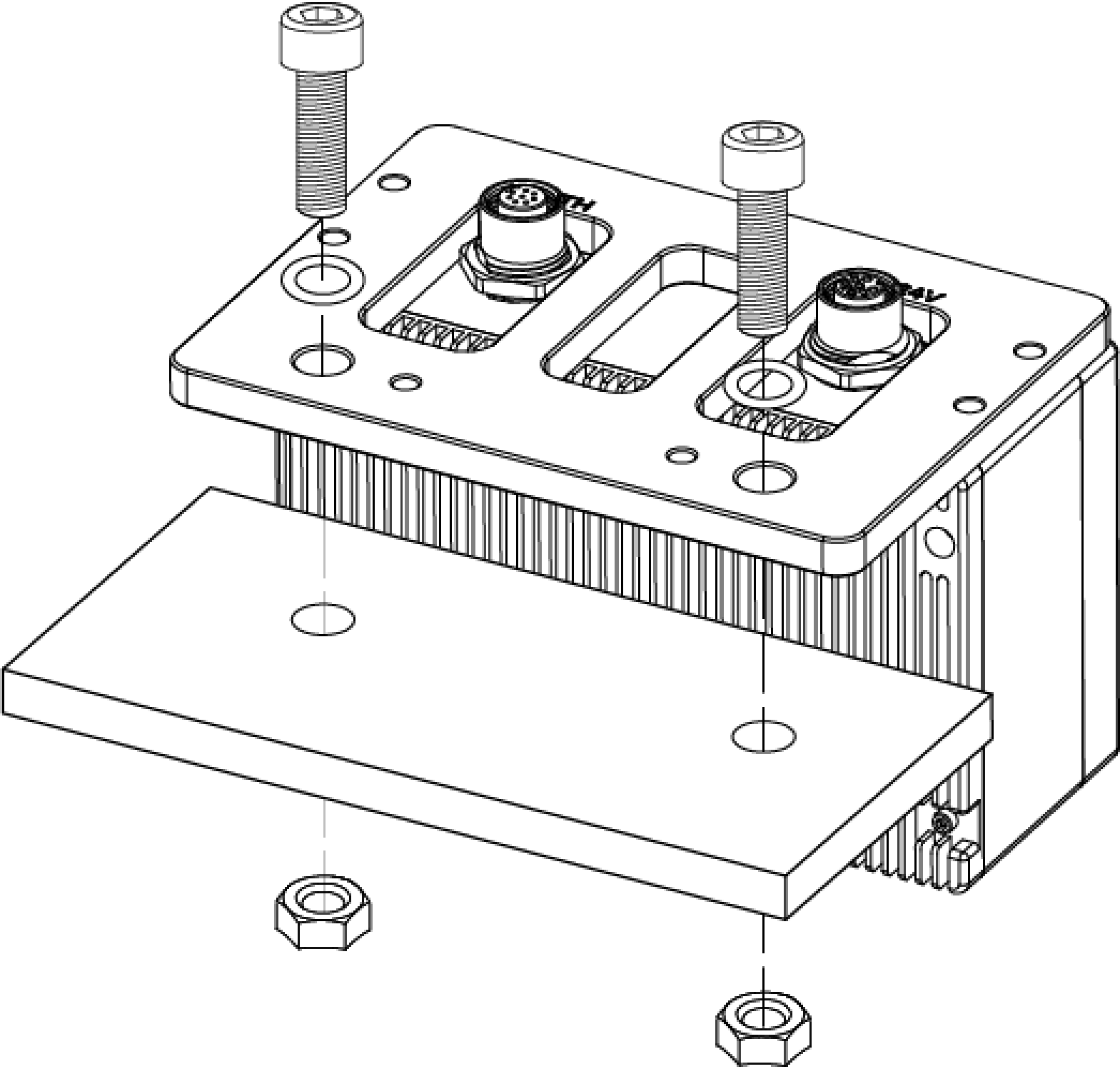
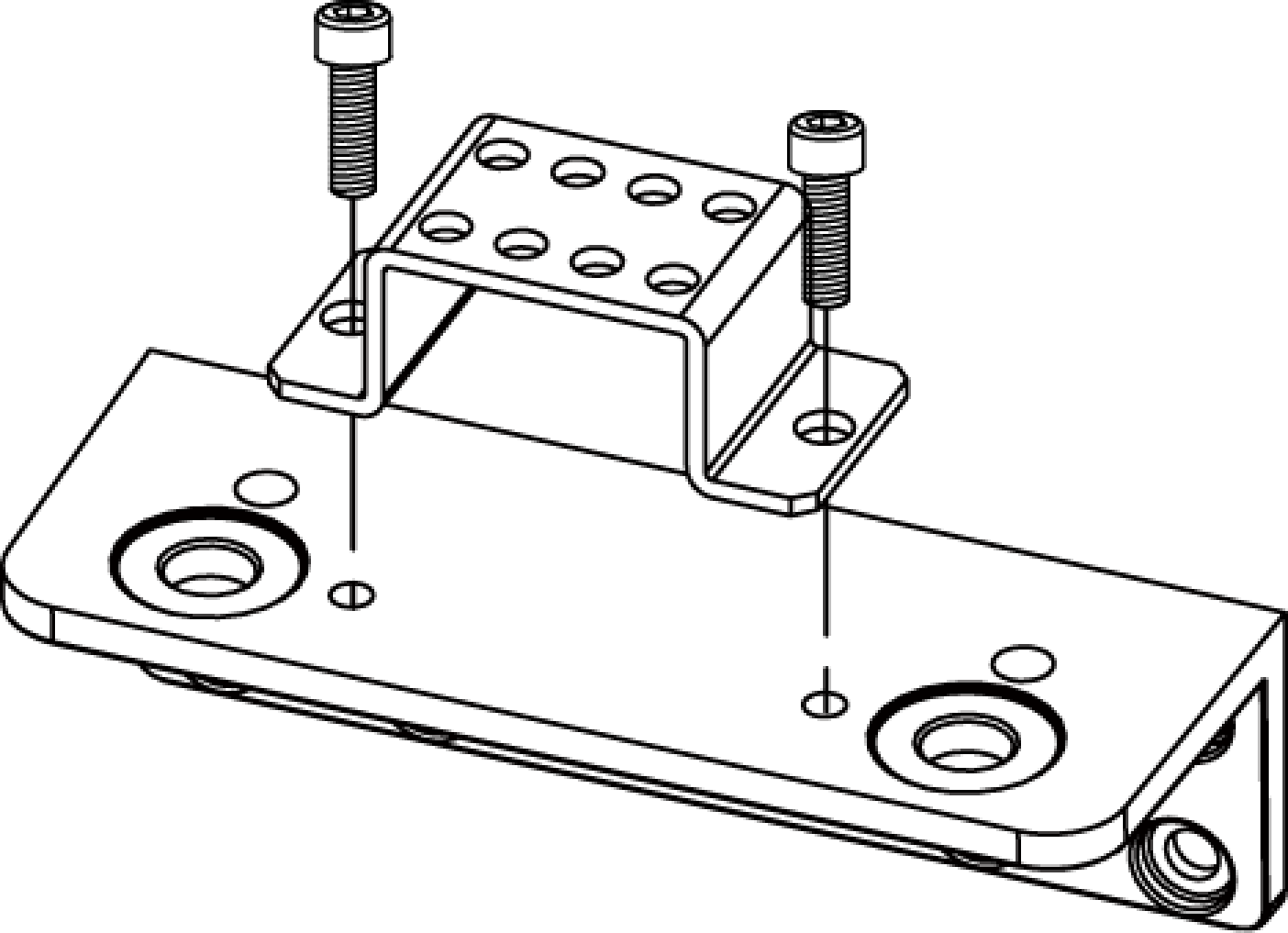
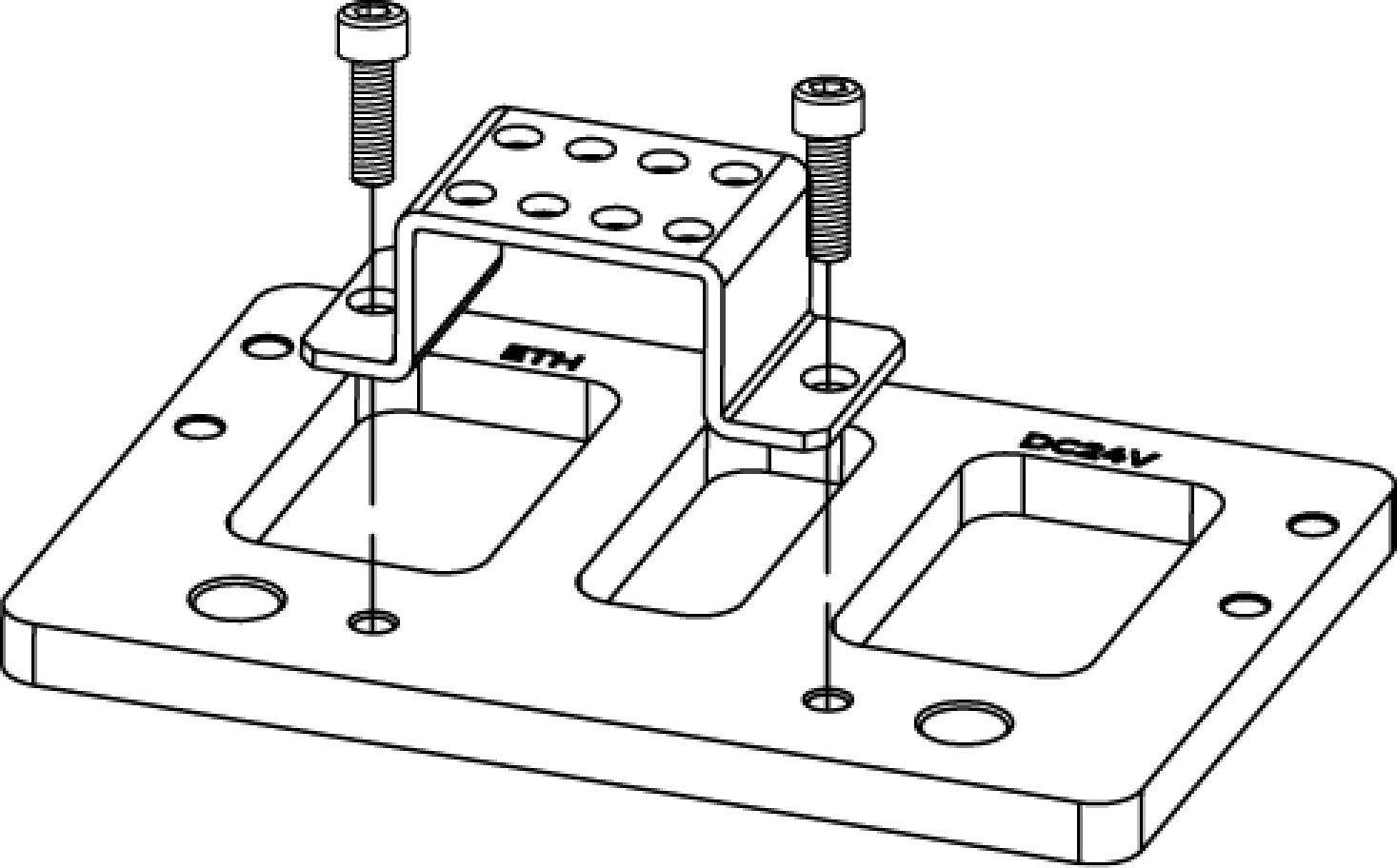
如下图所示,放置2片M8垫片和2颗M8 × 20 T型螺栓,然后使用开口扳手拧紧2颗法兰螺母。推荐扭矩为12~13N·m。
-
DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M和UHP-140:
-
NANO:
-
NANO ULTRA和Welding:
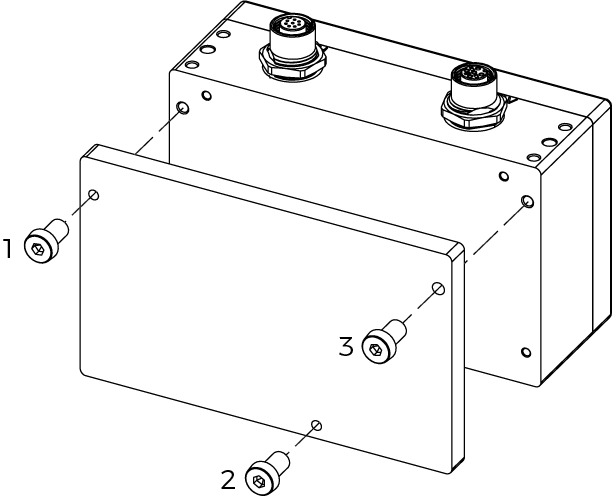
3.2. 使用相机背面螺纹孔安装
|
LSR S、NANO ULTRA和Welding使用此安装方式时,需将相机背面贴紧金属散热面安装,防止相机散热不良,影响正常工作。 |
-
使用内六角扳手拆卸相机转接件。 LSR S、NANO ULTRA和Welding还需拆卸散热板。
-
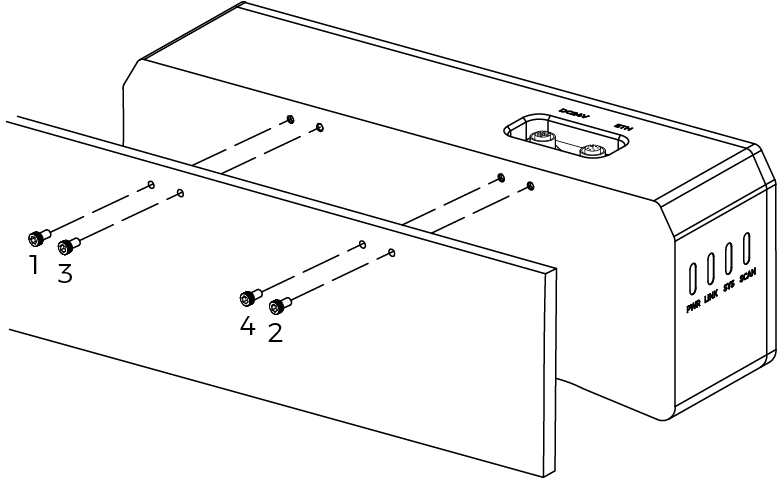
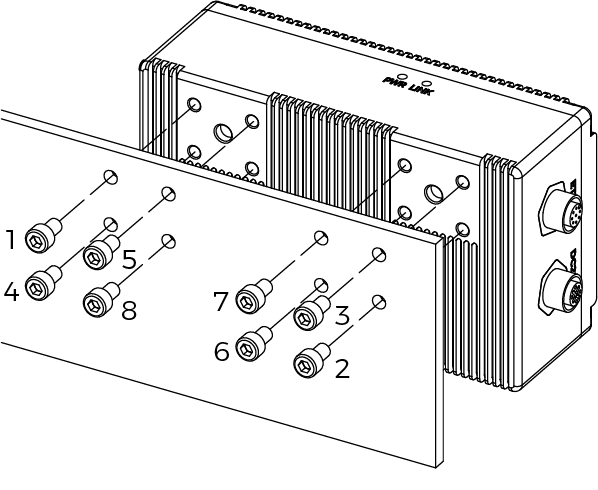
如下图所示,将对应规格的内六角圆柱头螺钉放入安装孔内,使用内六角扳手按顺序先预紧,再拧紧螺钉。
-
NANO ULTRA和Welding:M4 × 8内六角圆柱头螺钉(推荐扭矩:1.4~1.6N·m)
-
其他型号:M5 × 8内六角圆柱头螺钉(推荐扭矩:2.2~2.5N·m)
不同型号所需的螺钉数量不同。
-
-
DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M和UHP-140:
-
NANO:
-
NANO ULTRA和Welding:
4. 连接线缆
请按照以下步骤,连接相机的网线和电源线。
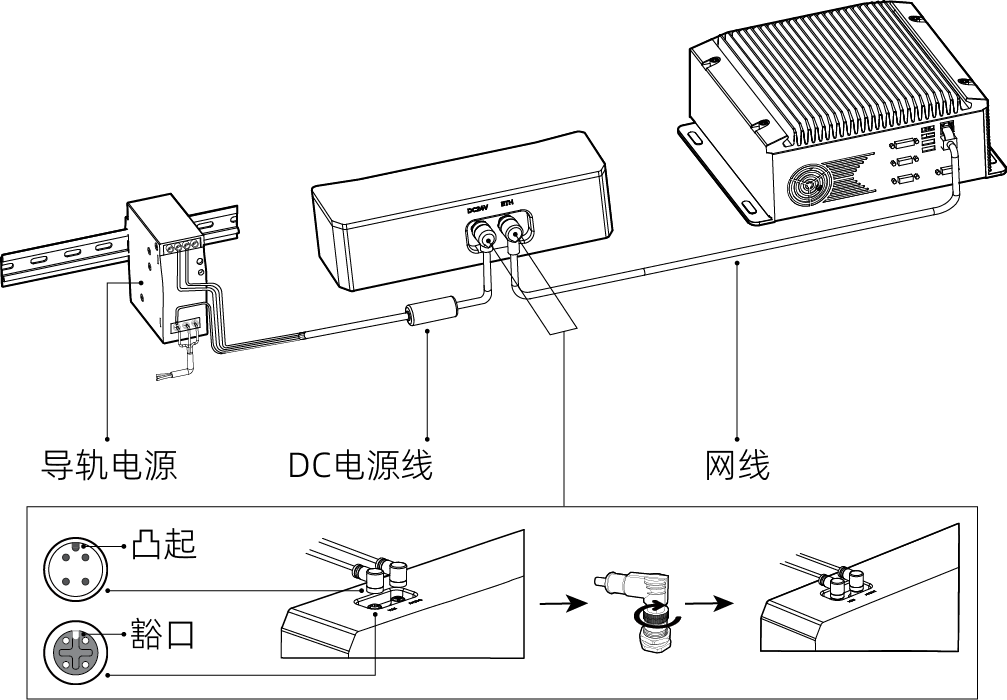
4.1. 网线和DC电源线
-
网线:将网线的航插头插入相机的ETH网口,RJ45接头插入工控机的网口。
-
DC电源线:将DC电源线的航插头插入相机的DC 24V电源接口。
连接网线与DC电源线时:
-
将航插的凸起对准对应接口的豁口插入。
-
拧紧紧固螺母,推荐扭矩为0.7N·m。拧紧后,约有2mm间隙。
|
4.2. 导轨电源
|
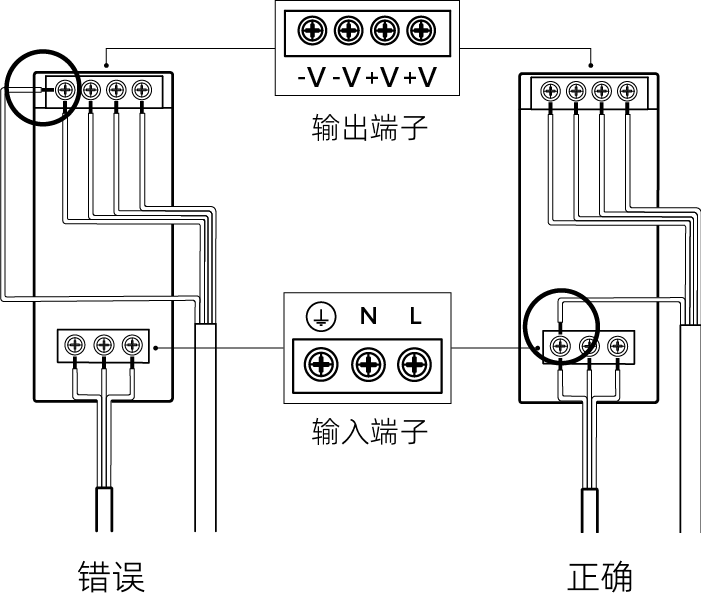
-
使用一字螺丝刀拧松导轨电源端子上的螺钉。
-
连接DC电源线:将2根标签为+V的线缆分别接入导轨电源上的2个+V输出端子,2根标签为-V的线缆分别接入2个-V输出端子,1根标签为PE的线缆接入接地端子(
 )。
)。 -
连接AC电源线:将火线接入导轨电源上的L输入端子,零线接入N输入端子,地线接入接地端子(
)。 -
使用一字螺丝刀拧紧端子上的螺钉。
|
5. 暖机
为保障本产品采集的数据精度达到技术参数中的标称值,开始使用本产品前请先进行连续数据采集来暖机。
-
推荐暖机时间:请查看技术参数。
-
推荐数据采集间隔:按照实际使用时的数据采集间隔进行暖机。如实际使用时的数据采集间隔不固定,则推荐按照平均数据采集间隔进行暖机。例如,实际使用时每6~10秒采集一次数据,则暖机时应每8秒采集一次数据。
相机硬件的安装和连接已完成。接下来将介绍如何使用Mech-Eye Viewer连接相机,并控制相机采集图像。
6. 下载并安装Mech-Eye SDK
你可以从梅卡曼德下载中心下载Mech-Eye SDK安装包。
解压安装包后,双击安装文件即可安装Mech-Eye SDK。更多详细信息可参考Mech-Eye SDK安装指南。
7. 设置IP地址
连接相机前,需确保以下两个IP地址唯一,且在同一网段。
-
相机IP地址
-
与相机相连的电脑网口的IP地址
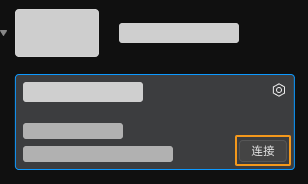
请按照以下步骤设置相机的IP地址:
-
双击打开Mech-Eye Viewer。
-
选择待连接的相机,单击
 。
。
9. 采集图像
单击上方的 ![]() 即可进行一次图像采集。
即可进行一次图像采集。
|
单击 |
单击图像采集按钮下方的数据类型,即可查看从相机获取的2D图、深度图和点云。
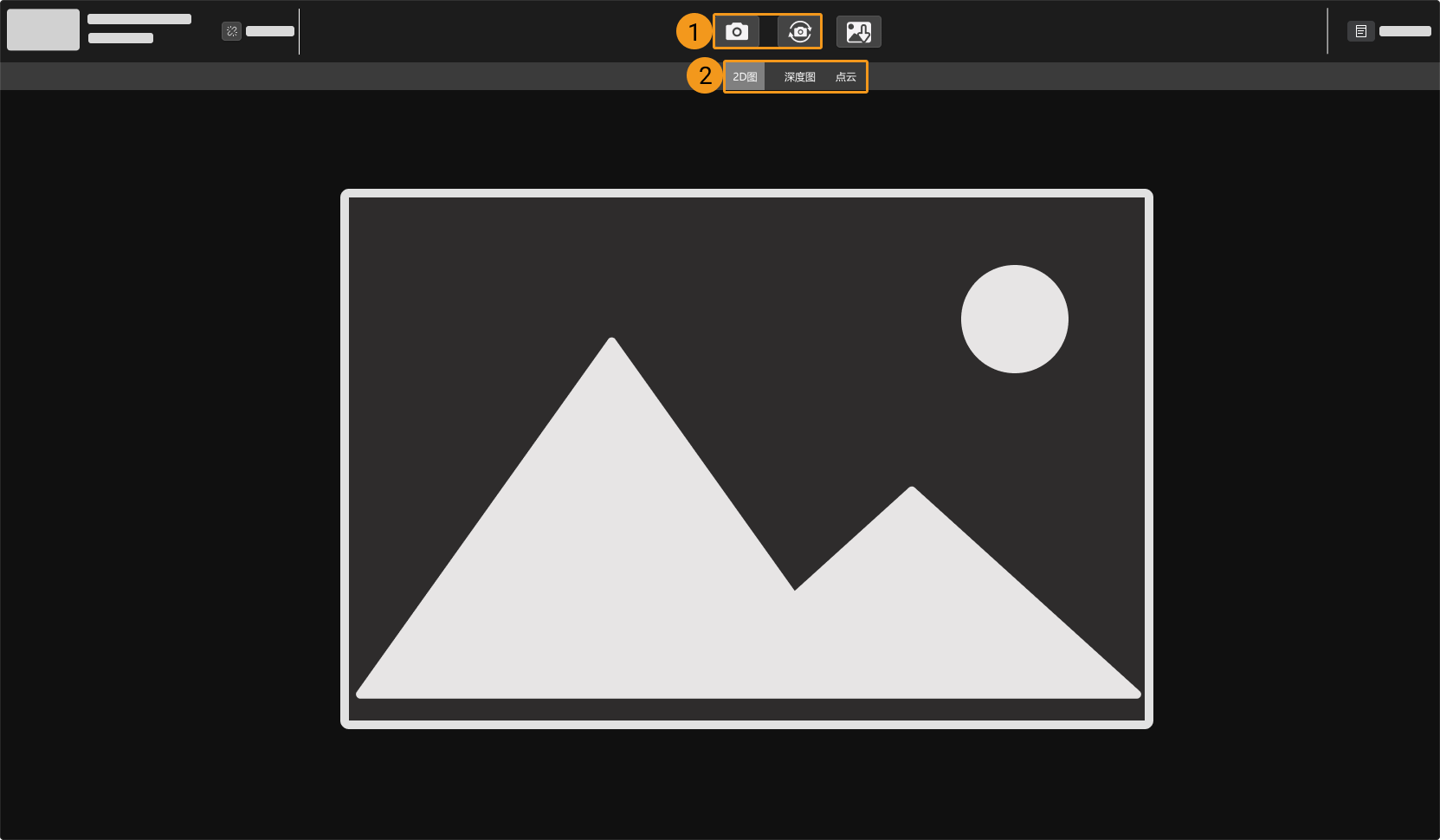
| 更多关于采集数据和数据类型的信息,详见采集与查看数据。 |
10. 调节参数
如获取的2D图、深度图和点云质量不理想,可在软件最右侧的参数标签页中调节相关参数,提升数据质量。
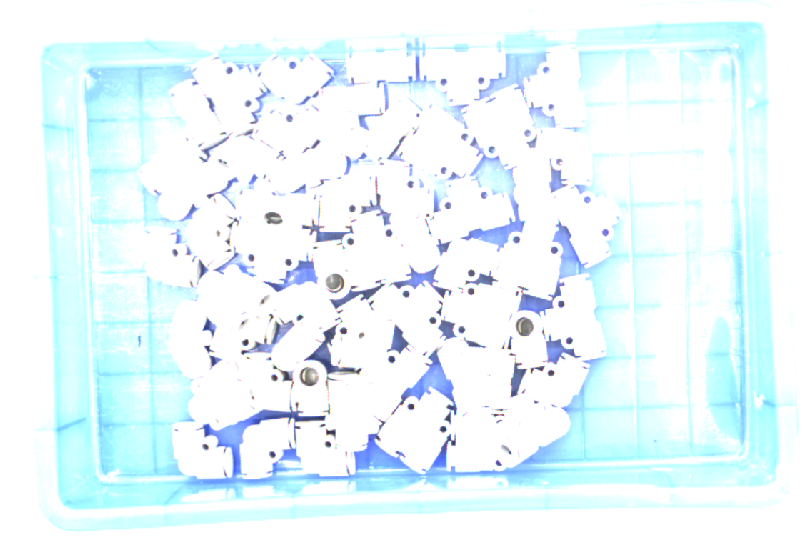
10.1. 判断数据质量
请根据以下标准,初步判断数据质量。
-
2D图:2D图应不过亮或过暗,可看清目标物体的表面特征。
过暗 合适 过亮 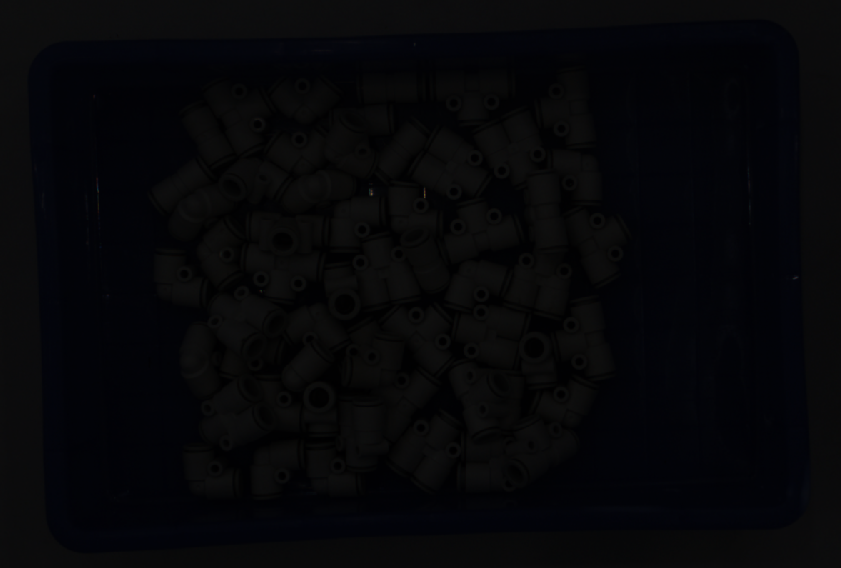

-
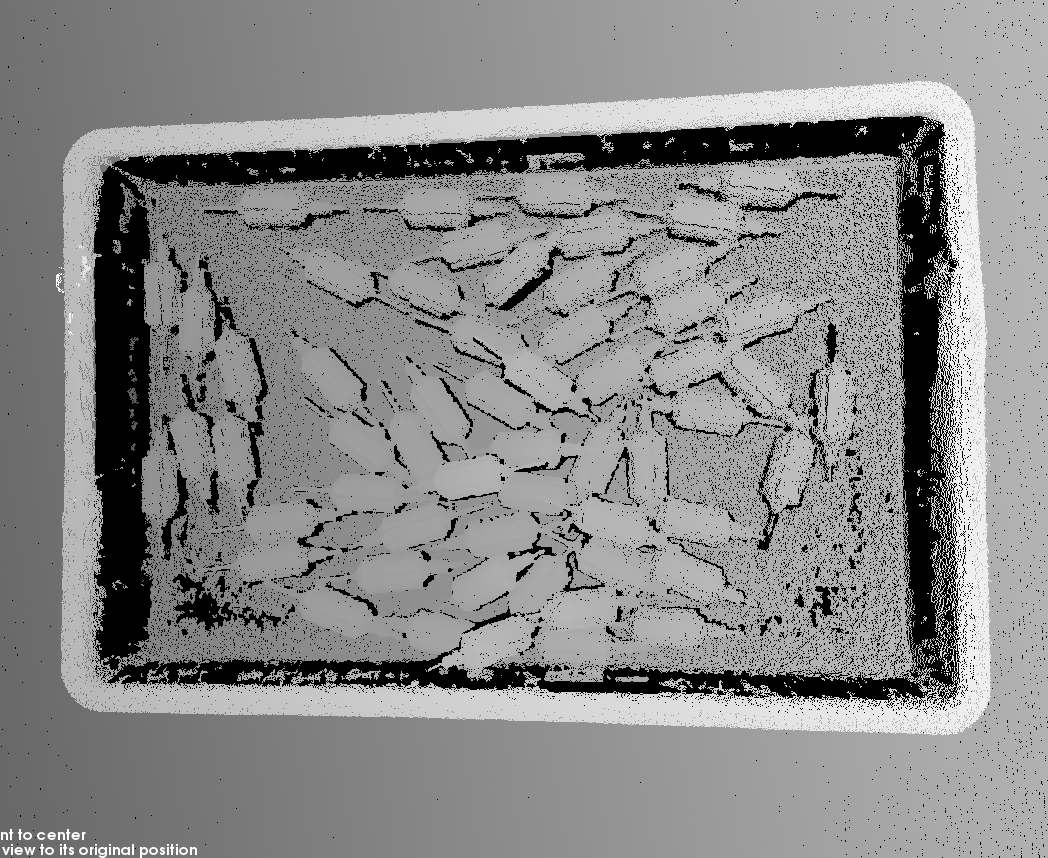
深度图和点云:深度图和点云中,目标物体对应的数据应完整。以下示例中,目标物体为转子。
目标物体的点云不完整 目标物体的点云完整 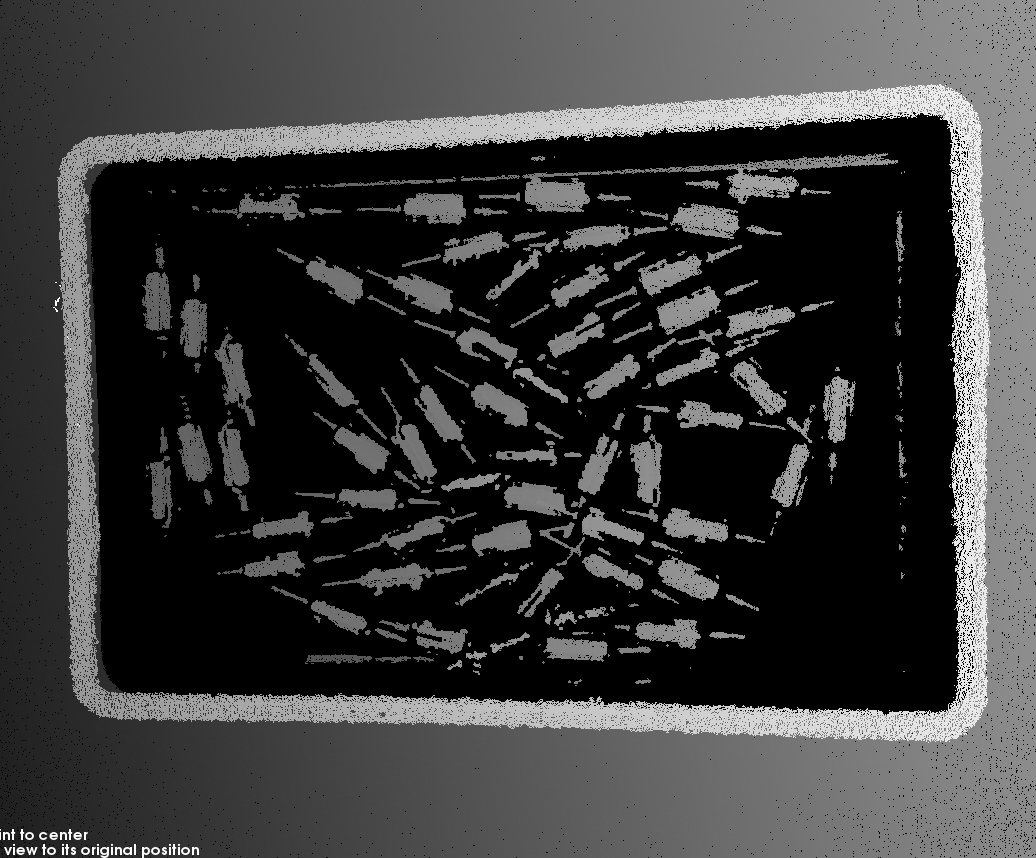
10.3. 提升深度图及点云质量
-
调节3D参数分组中的曝光时间参数。
-
如物体颜色较深或不易反光,请将曝光时间调大。
-
如物体颜色较浅或反光,请将曝光时间调小。
-
-
重新采集图像,确认深度图和点云的质量。
| 更多参数的说明,详见参数参考指南。 |
11. 使用数据
通过Mech-Eye Viewer获取的2D图、深度图和点云,可直接保存至本地,也可使用Mech-Vision或第三方机器视觉软件进行后续的处理和计算。
-
保存数据:单击数据采集区的
 ,设置保存路径,勾选需要保存的数据类型,再单击保存。
,设置保存路径,勾选需要保存的数据类型,再单击保存。 -
在Mech-Vision中使用数据:请参考视觉系统教程,学习搭建包含Mech-Vision在内的整套视觉系统。
-
在第三方机器视觉软件中使用数据:通过Mech-Eye API或GenICam接口,可将相机获取的数据传输至第三方软件。