相机精度
本章介绍用于衡量相机精度的指标及可能影响相机精度的因素。
衡量相机精度
相机精度可分为绝对精度和重复精度两类。以下小节分别介绍这两种精度指标。
绝对精度
相机的绝对精度衡量相机所采集数据的准确性。该指标基于VDI/VDE 2634 Part 2标准中列出的方法进行测试,测试结果作为相机技术参数中的VDI/VDE测量精度提供。
其测试方法如下:
-
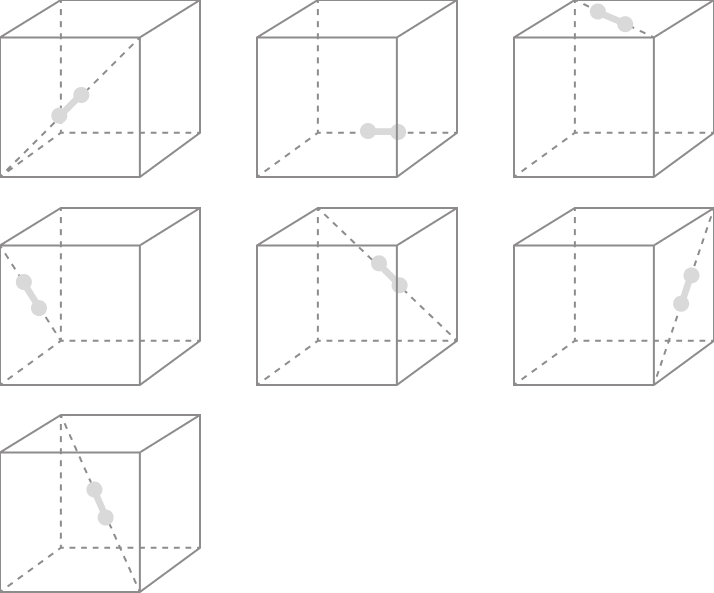
使用陶瓷材质的标准量具作为目标物体。该量具形状类似哑铃,为由一个短棍连接的两个球体。
-
将量具依次置于确定大小的三维空间中7个固定位置(如下图所示),并使用相机采集量具的点云数据。
-
使用点云数据拟合两个球面,并计算球心坐标,然后计算球心距(此为球心距测量值)。
-
计算球心距测量值和真值的差,并用该差值除以球心距真值作为球心距误差。取7个球心距误差中的最大值作为绝对精度。
重复精度
相机的重复精度包括Z向单点重复精度和Z向区域重复精度,可在相机技术参数中查看。
-
Z向单点重复精度(1σ):衡量相机所采集的单个像素深度数据(即Z值)的重复精度。
其测试方法如下:
-
使用表面粗糙、以漫反射为主的白色陶瓷板作为目标物体。
-
在不同工作距离下分别采集陶瓷板的数据100次。
-
计算各个工作距离下,陶瓷板上测试区域内每个像素的100次深度测量值的1倍标准差。取所有1倍标准差的中位数作为该工作距离的Z向单点重复精度。
-
-
Z向区域重复精度(1σ):衡量相机所采集的平面区域深度数据的重复精度。仅UHP-140提供该指标。
其测试方法如下:
-
使用表面粗糙、以漫反射为主的白色陶瓷板作为目标物体。
-
在不同工作距离下分别采集陶瓷板的数据100次。
-
在陶瓷板的深度图上确定两个面积为200 × 200像素的区域。在每次采集的深度图中,分别计算这两个区域内深度数据的平均值,并计算两个平均值的差。
-
计算各个工作距离下100个上述差值的1倍标准差,作为该工作距离的Z向区域重复精度。
-
影响相机精度的因素
相机精度可能受到以下因素的影响:
-
相机本身的硬件问题:相机整体或其组件(例如投光单元和图像传感器)存在故障或损坏。和其他设备的碰撞容易造成相机故障或损坏。
-
环境因素:光照条件、温度、湿度、震动等环境因素影响相机的性能。其中,温度可能导致温漂的问题。
-
机械变形:安装相机的机构发生变形或松动,导致相机的位置不稳定,从而影响精度。
重复精度还随着工作距离的增加而下降。请参考相机技术参数中的Z向单点重复精度曲线。
温漂
温漂指相机温度变化导致其输出的坐标数据发生变化的现象。不同温度下,相机内部的光学组件(例如投影单元和镜头)因热胀冷缩发生结构和位置变化,导致根据三角测量原理生成的坐标数据发生变化。
导致温漂的温度变化有两种来源:
-
相机内部:相机接通电源后,其内部的组件会产生热量,从而导致相机温度升高。
环境温度不变时,相机内部产生的热量和相机向周围环境散出的热量最终会使相机温度稳定(即达到热平衡)。
-
环境:相机外部的环境温度变化导致相机温度随之变化。
在相机达到热平衡后,如环境温度变化,相机温度也会再次变化。
温漂影响相机的绝对精度和重复精度,可能导致相机输出的坐标数据不能满足项目要求。应采取以下措施减少温漂的影响。
-
暖机:在进行手眼标定、检查内参、矫正内参和使用相机采集数据前,先进行暖机,使相机达到热平衡。暖机操作说明请参考暖机。
-
控制环境温度:维持稳定的环境温度,避免环境温度变化导致相机温度变化,进而导致温漂现象的发生。
-
部署视觉系统漂移自校正方案:如相机用于3D视觉引导应用中,可通过部署该方案解决包含温漂在内的3D视觉系统可靠性和稳定性问题。