抓取点制作策略
工件抓取点代表工件上可以被机器人抓取的位置。当工件支持以多种方式抓取时,特别是乱序场景下,建议在工件库中对工件配置不同的抓取策略,使不同摆放方式的工件在机器人可达范围内都可被抓取,以提高抓取成功率。
下文将介绍目前工件库支持的抓取策略。
配置多抓取点
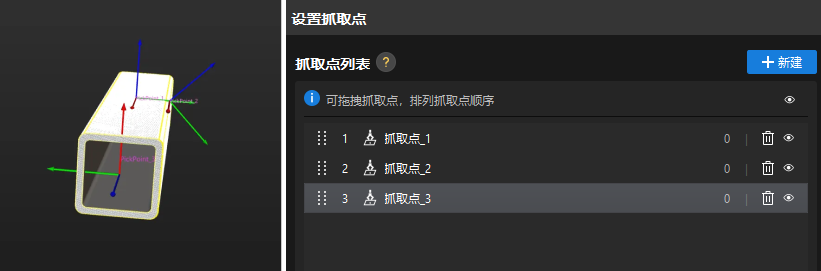
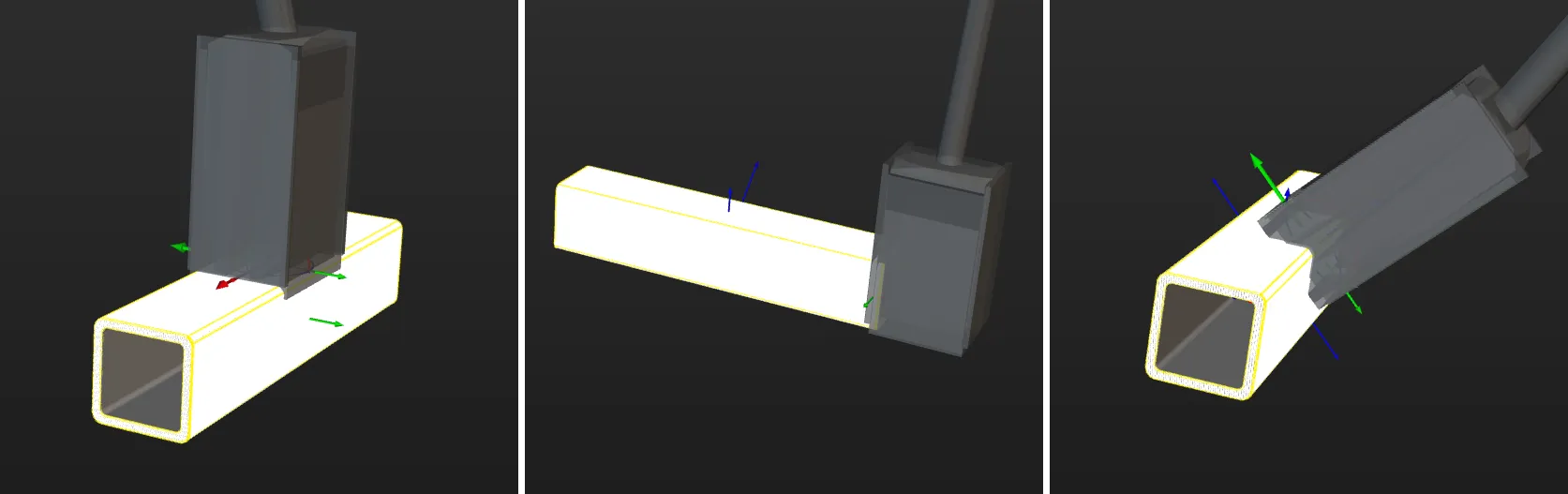
如下图所示,由于方管侧面、端面和棱边均可被磁吸夹具吸取,所以可在方管的上述三个位置设置抓取点。
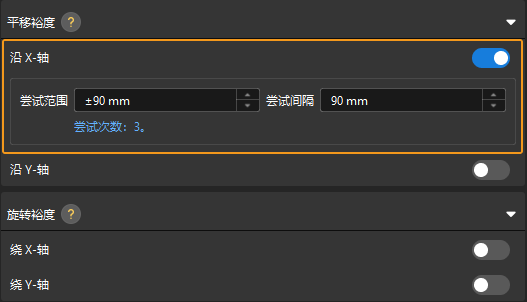
配置多抓取点时,还可改变抓取点在抓取点列表中的位置,即向上或向下调整抓取点排序可以调整抓取点的优先级,实际抓取时,列表上方的抓取点将被优先考虑。