点云模板制作策略
本节介绍如何根据实际情况选择点云模板制作方法,以及如何选取特征点云。
选择点云模板制作方法
下表列出了常见的点云模板制作方法,并介绍了各方法的适用场景及示例。
| 点云模板制作方法 | 适用场景 | 示例 | |
|---|---|---|---|
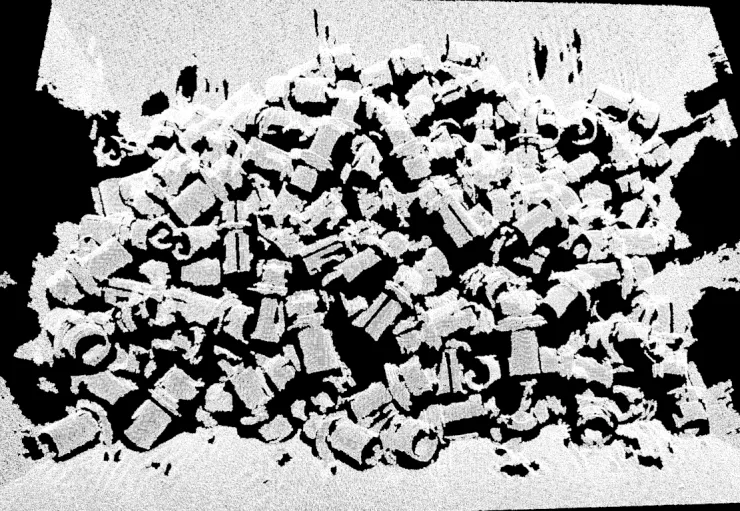
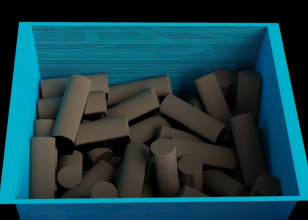
无序抓取场景,或工件位姿变化会引起特征点云显著变化的场景,例如无序钣金件、无序棒料场景。 |
|
|
|
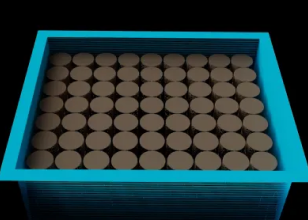
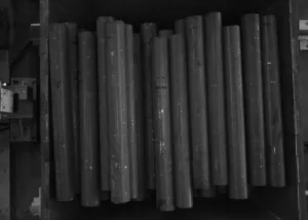
相对有序抓取场景,或工件表面特征点云无明显变化的场景,例如周转箱、有序壳体场景。 |
|
|
|
仅适用于有序圆棒、有序圆环、有序矩形工件、无序棒料场景。 |
|
|
|
通过步骤输入尺寸信息生成点云模板 |
适合用于用户根据需要动态调整步骤参数,以实现点云模板切换的场景。例如有序刹车盘、有序棒料场景。 |
|
|





|
如果选择通过步骤输入的尺寸信息生成点云模板,则需要将3D匹配步骤的输入输出设置(高级/专家调试等级)中开启外部模板,然后步骤新增“面模板点云”、“边缘模板点云”、“物体中心点”输入端口,用于输入工程信息。 |
选取特征点云
制作点云模板时,需从原始点云中去除可能干扰匹配的非关键点云,然后选取最具代表性的点云作为点云模板,以优化后续匹配过程,提升匹配效率和准确性。下文将介绍如何根据实际场景选取特征点云。
工件点云较完整的场景
通过导入STL文件生成点云模板
边缘点云模板
-
工件存在对称性
在实际应用中,工件通常具有多种放置姿态,仅需提取并留存可代表工件边缘特征的点云作为点云模板。
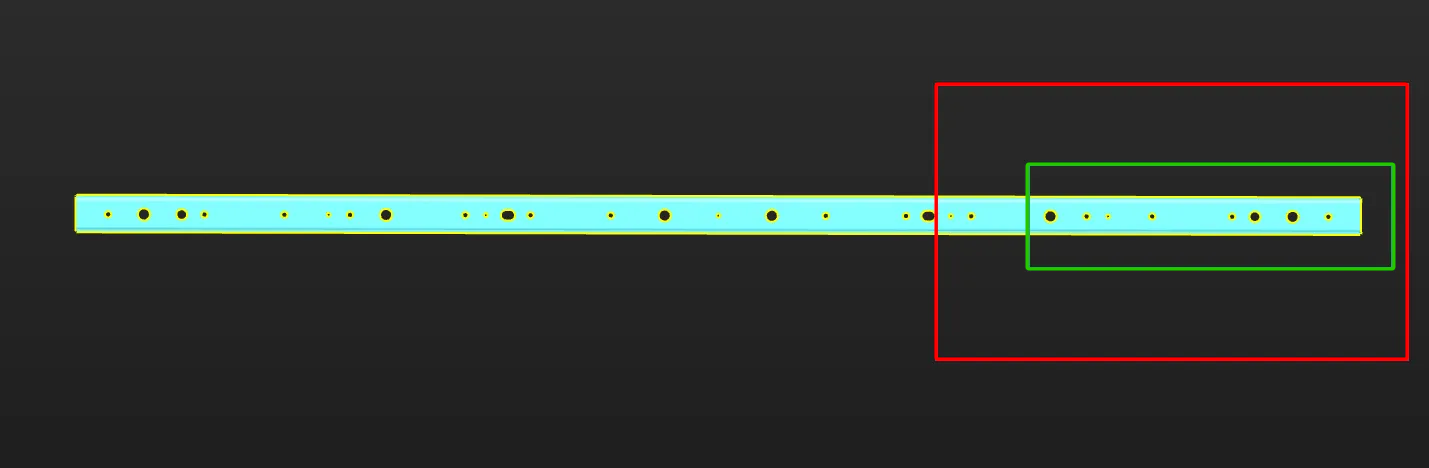
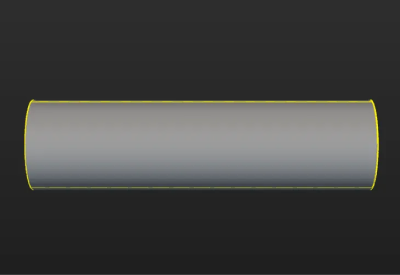
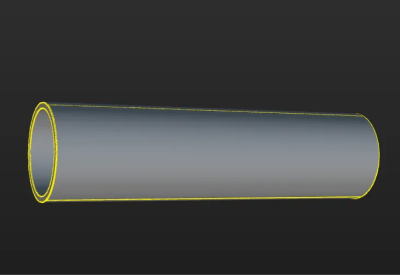
如下图为圆管边缘点云模板。由于圆管形似圆柱体且存在对称性,所以只需保留圆柱体侧面的边缘点云。同时为了确保能够精确定位圆管的两端,还需保留圆管两端的边缘点云。
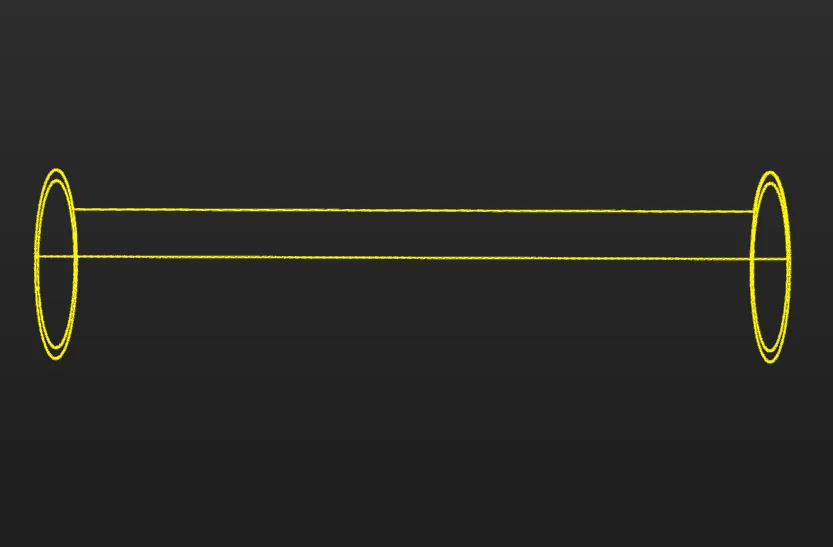
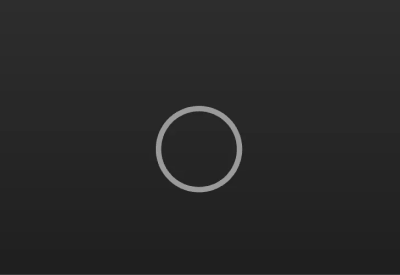
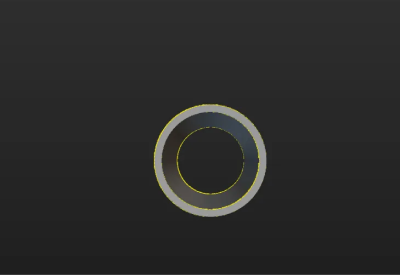
下表为圆管在不同放置姿态时对应的边缘点云。
圆管放置姿态 对应的边缘点云(黄色) 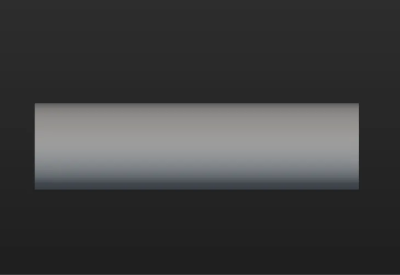
-
工件不存在对称性
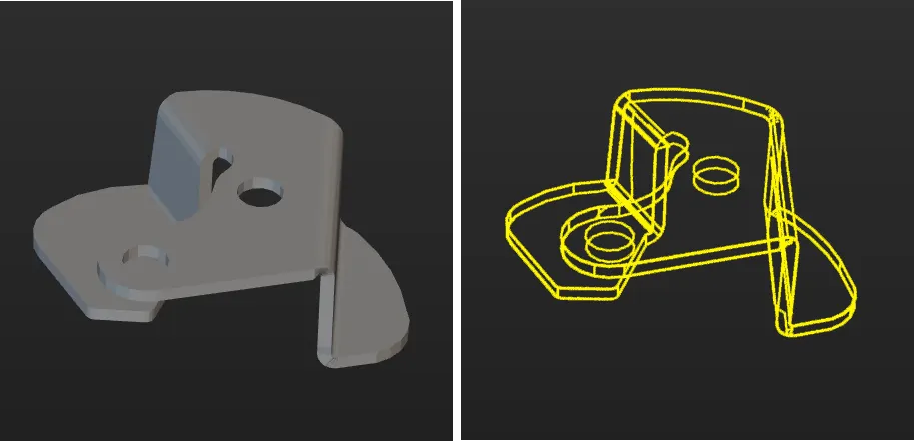
如下图所示为钣金件边缘点云模板。由于钣金件不存在对称性,所以需保留工件所有视角的边缘点云。
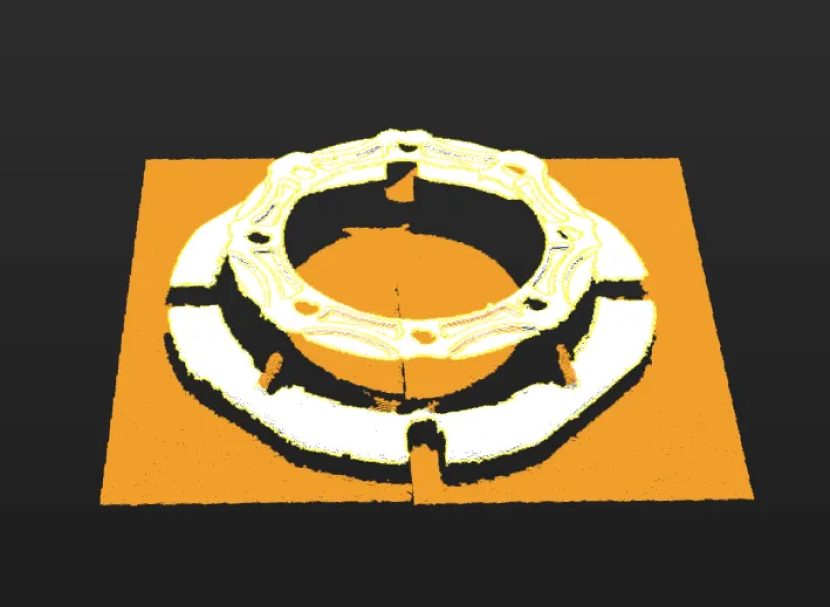
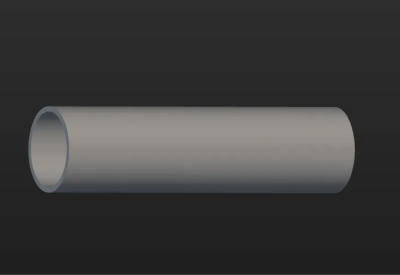
面点云模板
面点云模板在验证位姿正确性和计算位姿置信度时起到关键作用,所以制作面点云模板时更推荐使用完整工件的面点云,以提高面点云模板的有效性。如下图所示为圆管的面点云模板。

|
使用STL模型生成点云时,需先判断STL模型法线是否正确。如果STL模型的法线存在异常,则STL模型所生成的点云法线也将存在异常,直接影响匹配效果。 关于如何检查STL模型法线以及修正STL模型,可参考STL模型修正。 |