碰撞检测参数配置
为防止机器人在抓取过程中发生碰撞,Mech-Viz配备了灵活检测不同类型物体之间的碰撞功能。
按要求添加场景、工具和工件的碰撞模型后,您可在碰撞检测面板中开启各项之间的碰撞检测。
本节介绍常见场景下的碰撞检测参数配置。
拆垛场景
推荐配置
-
在Mech-Vision的输出步骤的步骤参数区中,选择场景为拆垛,并勾选发送点云到外部服务、点云在相机坐标系下及其他输入。

-
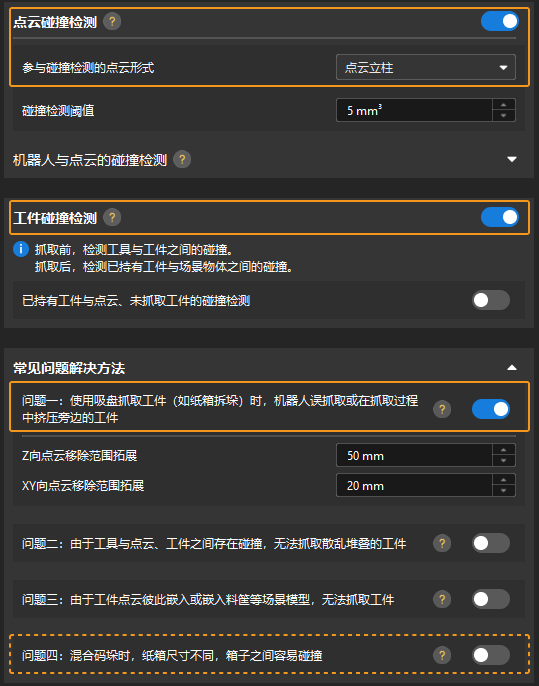
在Mech-Viz的碰撞检测功能面板中,开启点云碰撞检测,并将参与碰撞检测的点云形式设置为点云立柱。
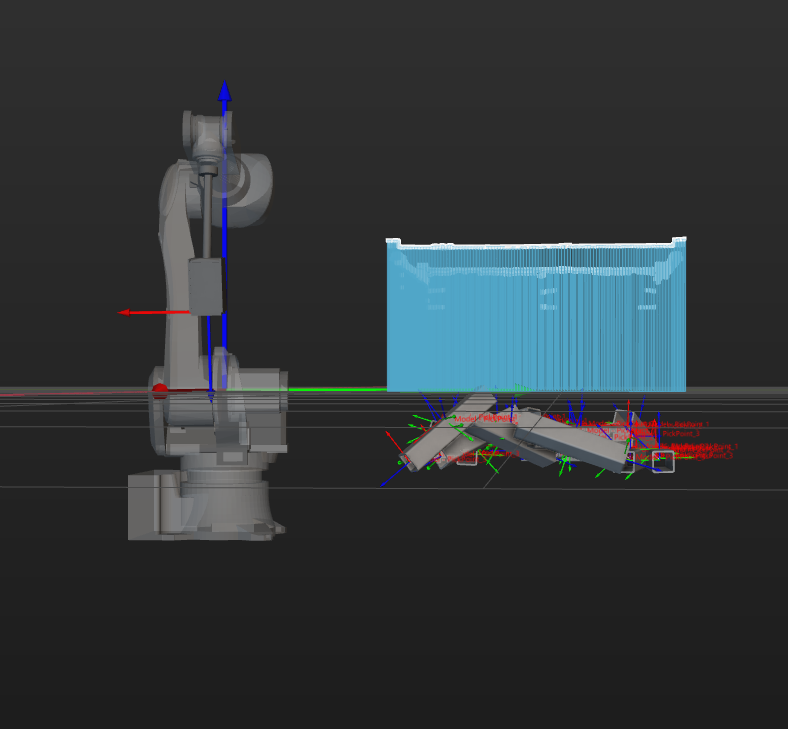
参与碰撞检测的点云形式为点云立柱时,Mech-Viz会使用纸箱上表面的点云(起点),沿着世界坐标系的负Z方向延伸至三维仿真界面中的地板(终点),生成点云碰撞模型。使用点云立柱可避免使用吸盘抓取纸箱时(特别是在侧吸场景下)与其他纸箱发生碰撞。
关于参与碰撞检测的点云形式的详细说明,请参考参与碰撞检测的点云形式。
默认情况下,三维仿真界面的世界坐标系原点和机器人坐标系原点重合。如果机器人坐标系原点没有位于基座下,而是位于机器人一轴处,地板也位于机器人一轴所在平面,点云立柱形成的碰撞模型高度不足。该情况下请在工程资源树中右键单击地板,调整地板高度,将其向下移动至真实地板所在平面。
-
在Mech-Viz的碰撞检测功能面板中,开启工件碰撞检测,保持已持有工件与点云、未抓取工件的碰撞检测默认不开启状态。
检测已持有纸箱在后续的动作中与其他场景物体的碰撞。
-
开启问题一右侧的开关。具体参数配置说明,请参考常见问题解决方法。
-
在混合码垛场景中,可开启问题三右侧的开关,在箱子的碰撞模型底部增加一定厚度,并使用增厚的碰撞模型进行碰撞检测。
无序物体抓取场景
推荐配置
-
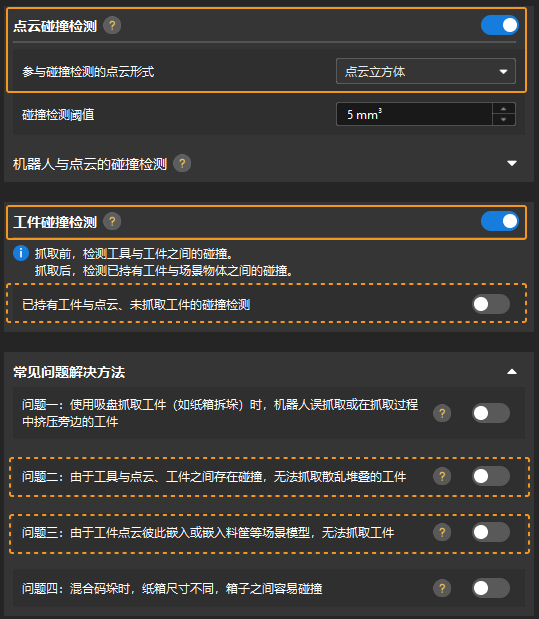
在Mech-Viz的碰撞检测功能面板中,开启点云碰撞检测,并将参与碰撞检测的点云形式设置为点云立方体。
通过点云碰撞检测,避免末端工具与实际工件发生点云碰撞。
-
在Mech-Viz的碰撞检测功能面板中,开启工件碰撞检测。如果不允许已持有工件与未抓取工件的任何碰撞,开启已持有工件与点云、未抓取工件的碰撞检测。
检测已持有工件在后续的动作中与其他场景物体的碰撞。
-
如果实际情况与以下任一场景相符,请开启常见问题解决方法下问题二旁边的开关。
-
末端工具在抓取工件时可以容忍轻微碰撞。
-
当工件实际可抓取,但由于工件点云彼此嵌入或嵌入料筐等场景物体,导致软件检测出碰撞而路径规划失败。该场景下,如需为抓取前和抓取后分别设置不检测碰撞的路径长度,请点击拆分参数。
请注意不检测碰撞的路径长度不宜过大,以避免发生严重碰撞。
-