确保抓取精度合格的思路
在实际应用部署的各个阶段,需要采取针对性的精度提升措施来减小可能出现的误差,最终确保抓取精度满足项目需求。
各个部署阶段应采取的提升措施说明如下。
| 部署阶段 | 提升措施 | 说明 |
|---|---|---|
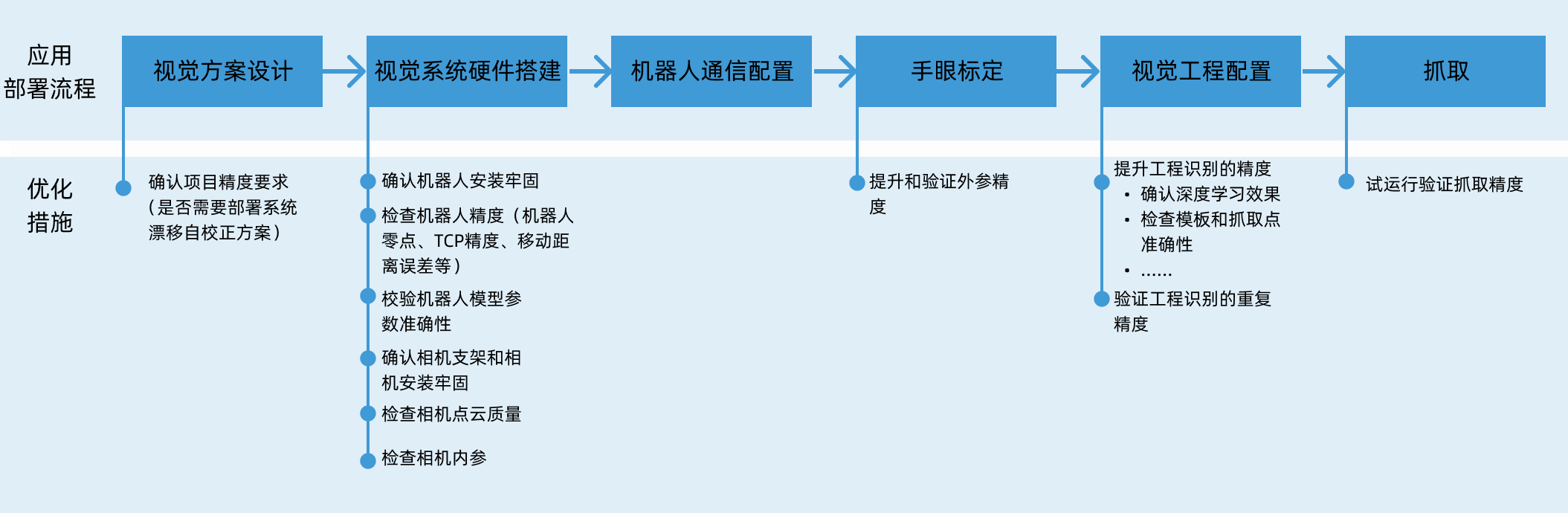
1. 视觉方案设计 |
确认项目的精度要求。 |
应用部署前需要先确定应用需要满足的项目精度要求。对于高精度场景,确认是否需要部署系统漂移自校正方案。 |
2. 视觉系统硬件搭建 |
确认机器人安装牢固。 |
机器人安装不牢固会影响机器人的重复精度。 |
检查机器人精度。 |
排查机器人零点是否丢失,检查移动距离误差,并确认TCP精度。 |
|
校验机器人模型参数准确性。 |
如果机器人模型参数不准确,会导致视觉系统输出的路径点不准确,甚至导致碰撞。 |
|
确认相机支架和相机安装牢固。 |
相机支架和相机安装不牢固,会影响相机的绝对精度和重复精度。 |
|
检查相机点云质量。 |
相机点云质量过差会影响视觉识别的精度。 |
|
检查相机内参。 |
检查相机内参确保相机内参合格。 |
|
3. 机器人通信配置 |
/ |
/ |
4. 手眼标定 |
提升和验证外参精度。 |
外参精度误差过大会导致抓取位姿误差增大。手眼标定后需要验证外参的精度。 |
5. 视觉工程配置 |
提升工程识别的精度。 |
识别算法的选择、点云模板以及抓取点的准确性会影响输出位姿的精度。 |
验证工程识别的重复精度。 |
视觉工程配置完成后,需要验证视觉工程输出位姿的重复精度。 |
|
6. 抓取 |
试运行验证抓取精度。 |
在将视觉系统正式投入产线使用之前,需要进行试运行以验证抓取精度。 |
下一步,你可以按照提升措施来提升应用的整体抓取精度。