仿真碰撞原因排查
当实际工件可以抓取,但Mech-Viz软件检测到碰撞而无法进行抓取时,需要结合规划历史查看碰撞信息。本节介绍如何在仿真中排查碰撞原因。
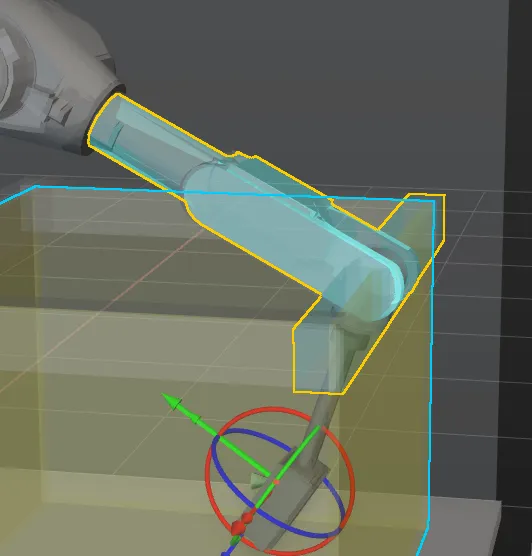
末端工具与点云碰撞

当规划历史中显示末端工具与点云碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
与噪点碰撞 |
在Mech-Vision工程中使用点云聚类、点过滤、提取3D ROI内点云等步骤删除噪点。 |
抓取点或者工件位姿不准确 |
检查Mech-Vision工程的识别结果是否准确。 |
碰撞阈值设置过小 |
在现场条件允许的情况下,在Mech-Viz的碰撞检测面板中,增大点云碰撞检测下的碰撞检测阈值。 |
抓取点设置不合适 |
在工件库中设置抓取点阶段,启用抓取配置下的末端工具,预览工具与抓取点的相对位置关系,确保抓取点设置合理,避免工具与工件之间发生碰撞。 |
末端工具模型、TCP、抓取点不匹配 |
在创建末端工具模型时,安全余量过大、TCP位置设置过高或抓取点位置设置过低,都可能导致过度检测点云碰撞。因此,这三项设置需确保精确。如果使用示教法设置抓取点,请确保末端工具模型的尺寸和安装角度与实际工具一致。制作夹指部分模型时,应尽量精细,以高度还原实物形态。 |
工件散乱堆叠,末端工具在抓取时可能与其他工件发生轻微碰撞 |
尝试忽略此部分碰撞。在Mech-Viz的碰撞检测面板中,视情况开启常见问题解决方法中问题二旁边的开关,查看解决方案。请注意忽略碰撞后可能引入安全风险。 |
末端工具与未抓取工件碰撞

当规划历史中显示末端工具与未抓取工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
抓取点或者工件位姿不准确 |
检查Mech-Vision工程的识别结果是否准确。 |
碰撞阈值设置过小 |
在现场条件允许的情况下,在Mech-Viz的碰撞检测面板中,增大点云碰撞检测下的碰撞检测阈值。 |
抓取点设置不合适 |
在工件库中设置抓取点阶段,启用抓取配置下的末端工具,预览工具与抓取点的相对位置关系,确保抓取点设置合理,避免工具与工件之间发生碰撞。 |
末端工具模型、TCP、抓取点不匹配 |
在创建末端工具模型时,安全余量过大、TCP位置设置过高或抓取点位置设置过低,都可能导致过度检测点云碰撞。因此,这三项设置需确保精确。如果使用示教法设置抓取点,请确保末端工具模型的尺寸和安装角度与实际工具一致。制作夹指部分模型时,应尽量精细,以高度还原实物形态。 |
工件散乱堆叠,末端工具在抓取时可能与其他工件发生轻微碰撞 |
尝试忽略此部分碰撞。在Mech-Viz的碰撞检测面板中,视情况开启常见问题解决方法中问题二旁边的开关,查看解决方案。请注意忽略碰撞后可能引入安全风险。 |
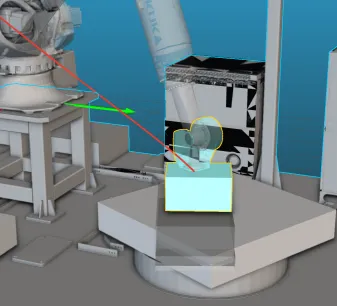
末端工具与场景物体碰撞

当规划历史中显示末端工具与场景物体碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
过渡点位置不合适 |
根据实际场景手动调整过渡点。 |
场景物体安全余量过大 |
一般情况下,在抓取点与放置点附近,场景物体的安全余量可控制在5mm左右。根据具体情况,可以适当增加其他位置场景物体的安全余量。如果料筐变形较大,可以考虑将参与碰撞检测的点云形式设置为点云立柱。 |
末端工具与已放置工件碰撞

当规划历史中显示末端工具与已放置工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
放置点位置不合适 |
根据实际场景手动调整放置点。 |
在末端工具持有工件的过程中,无论工具与工件是否彼此嵌入,均不会被判定为碰撞。当放下工件时,“已持有工件”变为“已放置工件”,若工具与工件彼此嵌入,此时将会判定为工具与“已放置工件”发生碰撞。 |
选择抓放设置为放的步骤的后一个移动步骤,在移动步骤基本参数中,勾选不检查与已放置工件的碰撞。 |
机器人连杆与未抓取工件碰撞

当规划历史中显示机器人连杆与未抓取工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
过渡点位置不合适 |
根据实际场景手动调整过渡点。 |
抓取点设置不合适 |
在工件库中设置抓取点阶段,启用抓取配置下的末端工具,预览工具与抓取点的相对位置关系,确保抓取点设置合理,避免工具与工件之间发生碰撞。 |
机器人连杆与点云碰撞

当规划历史中显示机器人连杆与点云碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
与噪点碰撞 |
在Mech-Vision工程中使用点云聚类、点过滤、提取3D ROI内点云等步骤删除噪点。 |
过渡点位置不合适 |
根据实际场景手动调整过渡点。 |
碰撞阈值设置过小 |
在现场条件允许的情况下,在Mech-Viz的碰撞检测面板中,增大点云碰撞检测下的碰撞检测阈值。 |

机器人连杆与已放置工件碰撞

当规划历史中显示机器人连杆与已放置工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
放置点位置不合适 |
根据实际场景手动调整放置点。如果工件存在对称性,可在工件库中配置对称性,以提供更多的放置方式。 |
已持有工件与未抓取工件碰撞

当规划历史中显示已持有工件与未抓取工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
碰撞检测参数设置不合理 |
在Mech-Viz的碰撞检测面板中,查看工件碰撞检测下方的已持有工件与点云、未抓取工件的碰撞检测是否开启。建议仅在工件勾连或剐蹭对抓取影响较大时,开启此选项。若工件之间轻微的碰撞对抓取影响不大,建议关闭此选项。 |
工件散乱堆叠,工件点云之间彼此嵌入 |
检查Mech-Vision工程中的识别结果,避免工件点云相互勾连、嵌入。 |
尝试忽略此部分碰撞。在Mech-Viz的碰撞检测面板中,视情况开启常见问题解决方法中问题二旁边的开关,查看解决方案。请注意忽略碰撞后可能引入安全风险。 |
|
在现场条件允许的情况下,在Mech-Viz的碰撞检测面板中,增大工件碰撞检测下的碰撞检测阈值。 |
已持有工件与点云碰撞

当规划历史中显示已持有工件与点云碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
碰撞检测参数设置不合理 |
在Mech-Viz的碰撞检测面板中,查看工件碰撞检测下方的已持有工件与点云、未抓取工件的碰撞检测是否开启。建议仅在工件勾连或剐蹭对抓取影响较大时,开启此选项。若工件之间轻微的碰撞对抓取影响不大,建议关闭此选项。 |
与噪点碰撞 |
在Mech-Vision工程中使用点云聚类、点过滤、提取3D ROI内点云等步骤删除噪点。 |
在Mech-Vision工程中输出步骤的步骤参数区勾选移除工件点云,或者适当增大工件点云搜索半径,减少噪点。 |
|
尝试忽略此部分碰撞。在Mech-Viz的碰撞检测面板中,视情况开启常见问题解决方法中问题二旁边的开关,查看解决方案。请注意忽略碰撞后可能引入安全风险。 |
|
在现场条件允许的情况下,在Mech-Viz的碰撞检测面板中,增大工件碰撞检测下的碰撞检测阈值。 |
已持有工件与场景物体碰撞

当规划历史中显示已持有工件与场景物体碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
场景物体安全余量过大 |
一般情况下,在抓取点与放置点附近,场景物体的安全余量可控制在5mm左右。根据具体情况,可以适当增加其他位置场景物体的安全余量。如果料筐变形较大,可以考虑将参与碰撞检测的点云形式设置为点云立柱。 |
识别出的工件位姿不准确,工件模型嵌入场景模型中 |
如果碰撞发生在机器人抓取工件准备拔出的阶段,可尝试忽略此部分碰撞。在Mech-Viz的碰撞检测面板中,视情况开启常见问题解决方法中问题二旁边的开关,查看解决方案。 |
过渡点位置不合适 |
根据实际场景手动调整过渡点,使机器人抓取后尽快远离障碍物。 |
已持有工件与已放置工件碰撞

当规划历史中显示已持有工件与已放置工件碰撞时,可能的原因及解决方法如下表所示。
| 可能原因 | 解决方法 |
|---|---|
放置点位置不合适 |
根据实际场景手动调整放置点。 |
检测到放置点处已存在工件 |
如果现场机器人需要把工件放在传送带等装置上,刚放置的工件会被移走,实际并不会发生碰撞。此时可在抓放设置为放的移动步骤后续的工作流程中添加一个重置步骤,清除已放置工件的碰撞模型。 |