碰撞模型配置
可在工程搭建阶段调整碰撞模型的尺寸,使碰撞检测更加准确高效。
场景模型
添加场景物体模型可在软件中还原真实场景,从而更有利于计算出无碰撞的机器人运动轨迹。
场景模型的添加应符合以下要求:
-
完整:尽可能完整地为机器人可达范围内的所有物体添加场景模型,以规避潜在的碰撞风险。
-
准确:如果场景模型的位姿或尺寸不准确,会导致过度检测或漏检测碰撞。
-
视情况预留安全余量:为确保机器人安全运行,必要时需增大相关物体的模型尺寸,留出足够的安全余量。对碰撞检测精确度要求越高的位置(如抓取点附近),场景模型需越贴近真实尺寸,以避免因尺寸过大导致计算失败;对碰撞检测精度要求较低,但对运行安全要求较高的位置(如ETH场景中的相机模型),场景模型需预留出足够大的安全余量。
-
模型需进行必要的简化:如果场景模型的细节过于丰富,一方面无益于碰撞检测准确度的提升;另一方面,将极大增加碰撞检测的计算时间。
推荐的场景模型搭建方法如下:
-
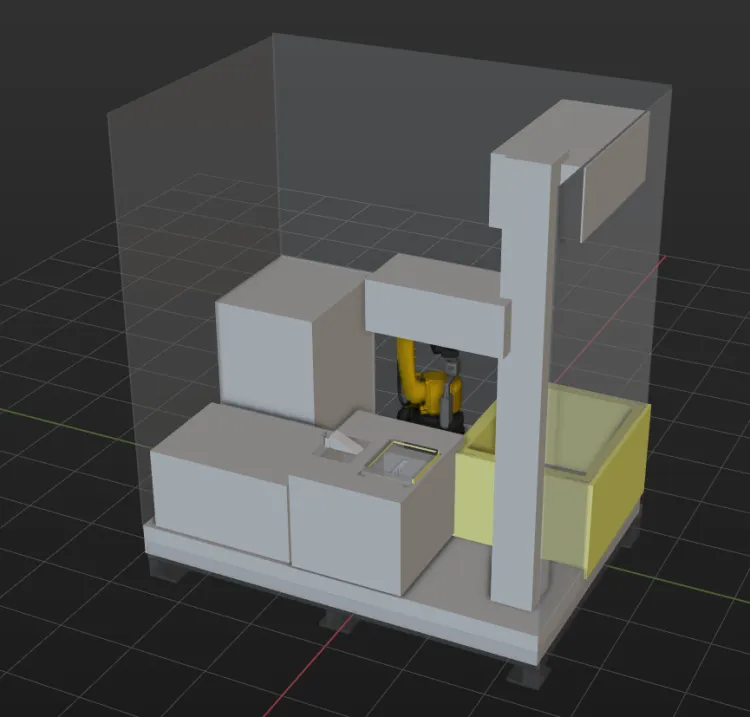
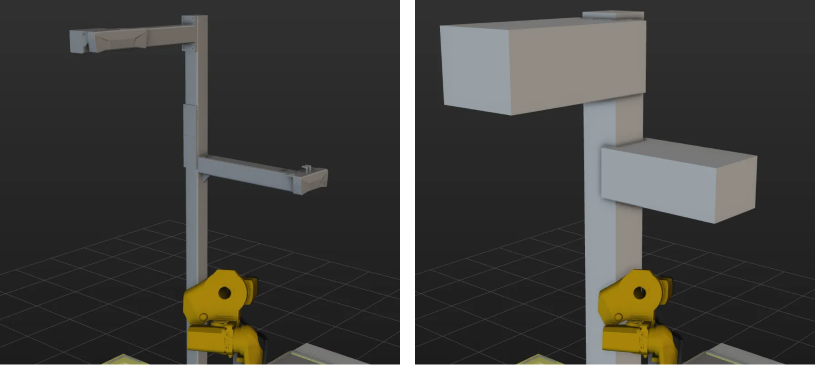
建议在三维仿真空间中新建长方体或圆柱体覆盖外部模型(如下图所示),以提高碰撞检测的效率。
-
在没有真实安全围栏的情况下,可自行创建长方体场景物体模拟墙体。开启碰撞检测后,可有效防止机器人移动范围超出工作站。
-
建议手动操作机器人接近工作站内的物体,并在Mech-Viz软件中同步机器人的位姿。通过这种方式,可以检查机器人是否与创建的场景模型发生碰撞。
-
在创建场景物体时,建议预留至少5mm的安全余量,以确保安全。
-
如果长方体、料筐或圆柱体类型的场景物体与外部模型重合,请在场景物体配置窗口中取消勾选参与碰撞检测,不检测外部模型的碰撞。仅保留对长方体、料筐或圆柱体类型的场景物体的碰撞检测。
| 对于已经进行过相机外参标定的工位,可以拍照检查点云与模型是否重合,以确保模型的准确性。 |
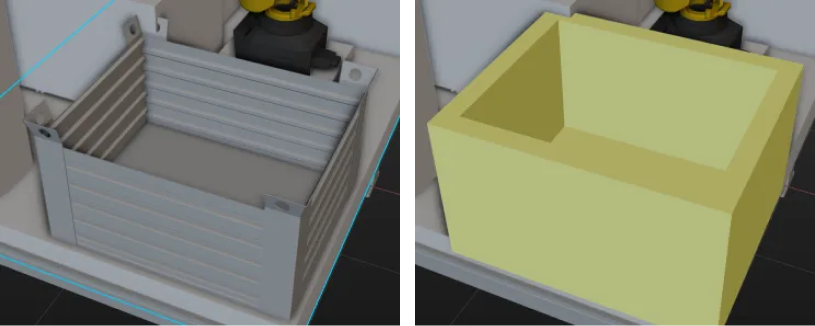
料筐模型
您可在Mech-Viz中创建料筐类型的场景模型,或自行导入外部模型类型的场景模型,用于碰撞检测。两种模型的优缺点如下:
-
创建料筐类型的场景模型
-
优点:支持手动调整模型尺寸,碰撞检测可以设置得更加严格,建议加厚5mm,推荐在立方体料筐场景下使用。
-
缺点:真实料筐一般不是标准的长方体,因此创建出的料筐往往与真实料筐之间存在差异。当料筐模型包围实际料筐时,筐壁附近的工件可能嵌入料筐模型,导致清筐率下降;当实际料筐包围料筐模型时,实际抓取过程中可能会剐蹭料筐壁。
-
-
导入外部料筐模型
-
优点:外部模型的形状与实际料筐更接近,抓取料筐侧壁附近的工件时不会出现误检测的问题。推荐在异形料筐场景下使用。
-
缺点:由于加工误差或形变,真实料筐与导入的外部模型之间可能存在差异,此时可能会出现碰撞漏检测或过检测。
-
当现场料筐来料位姿不一致时,为确保碰撞检测的可靠性,需要利用视觉识别来确定实际料筐的位姿,并相应地调整三维仿真空间中料筐场景模型的位姿。更多操作说明,请参考怎样在Mech-Viz中更新料筐位姿?。
末端工具模型
在2.0.0版本中,末端工具碰撞模型支持OBJ格式和STL格式。建议优先使用OBJ格式的工具碰撞模型。
由于STL模型是空心的,系统在点云碰撞检测时只能检测到其外表面与点云的碰撞,难以准确评估碰撞的严重程度。此外,为STL模型设置稳定的碰撞阈值也较为困难。相较之下,OBJ模型是实心的,因此更适合用于末端工具的碰撞检测。
如需使用STL格式的末端工具模型,建议使用点云立柱作为工件和场景物体参与碰撞检测的点云形式,此时工件和场景物体的碰撞模型相当于实心的,能够减少漏检的发生。
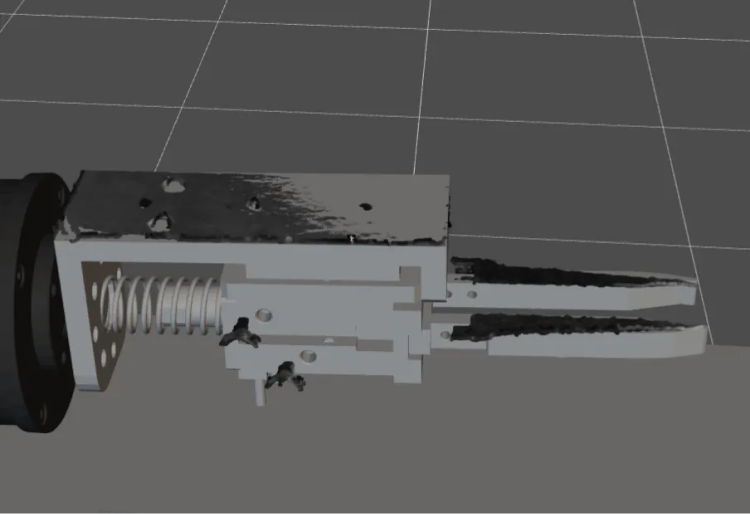
制作OBJ格式的末端工具模型
可使用模型编辑器在STL或STEP模型的基础上构建凸包并将其转换为OBJ格式。在制作末端工具模型时,为了减少制作碰撞模型所需的时间,不必在创建凸包时完全复原模型,可以根据实际情况选择性忽略一些细节,如下图所示。
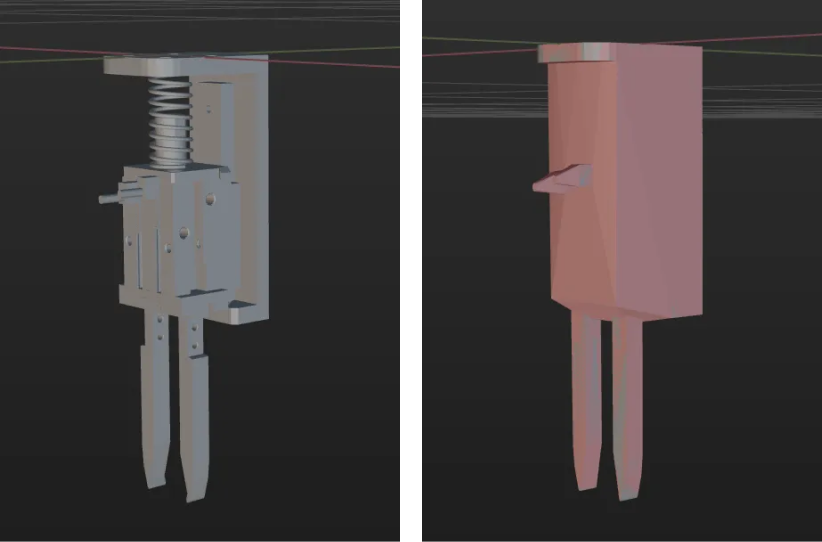
简化思路
-
制作夹指部分模型时,应尽量精细,以高度还原实物形态,从而保证碰撞检测的准确性和路径规划的成功率。
-
对于距离夹指部分较远的机械结构,可以简化处理,使用长方体凸包来替代复杂的结构设计,以提高效率。
末端工具模型检查
对于已经进行过相机外参标定的工位,可以拍照检查末端工具点云和模型是否重合。