视觉方案设计
在实际部署之前,需要先设计视觉方案,结合项目的实际需求确定相机型号、工控机型号、相机的安装方式以及机器人通信方式等。良好的设计有助于快速完成3D视觉引导应用的部署。
在3D视觉引导应用设计阶段,需要完成:
相机及配件选型
Mech-Eye工业级3D相机是梅卡曼德自研的高性能工业级3D相机,精度高、速度快、抗环境光、成像质量高,可对各类材质物体生成高质量3D点云数据。梅卡曼德提供丰富相机型号,满足远/中/近不同距离下对于抗环境光、高精度、大视野、高速度、小体积的需求。
工控机选型
梅卡曼德工控机提供了梅卡曼德软件所需的标准运行环境,可以将软件的功能和性能最优化。
请根据工控机的应用场景、技术参数和性能技术指标,选择工控机型号。各型号工控机的性能技术指标如下表所示。
| 技术指标 | 应用场景 | Mech-Mind IPC STD | Mech-Mind IPC ADV | Mech-Mind IPC PRO |
|---|---|---|---|---|
支持同时运行的Mech-Vision工程数量 |
标准接口/Adapter通信场景(无路径规划步骤) |
≤5 |
≤5 |
≤5 |
标准接口/Adapter通信场景(带路径规划步骤) |
≤5 |
≤5 |
≤5 |
|
主控通信场景(使用Mech-Viz软件) |
≤5 |
≤5 |
≤5 |
|
3D视觉方案使用3D匹配技术 |
≤5 |
≤5 |
≤5 |
|
3D视觉方案使用3D匹配和2D深度学习技术 |
≤2 |
≤2 |
≤4 |
|
单个方案支持连接的相机数量 |
≤2 |
≤2 |
≤2 |
|
单个方案支持加载的深度学习模型数量 |
≤5(CPU) |
≤5(GPU) |
<8(GPU) |
|
单个方案支持连接的机器人数量(主控通信) |
1 |
1 |
1 |
|
单个方案支持开启的通信方式数量 |
1 |
1 |
1 |
|
单个方案支持同时连入的客户端数量(标准接口/Adapter通信) |
≤4 |
≤4 |
≤4 |
|
如果你使用自有设备(笔记本或PC)作为工控机(以下简称“自有工控机”),请参考自有工控机设置确保自有工控机满足系统配置要求,并完成相应设置。
机器人及机器人法兰选型
机器人选型时,应考虑机器人负载、机器人可达性、通信方式等因素。详细请参考机器人选型。
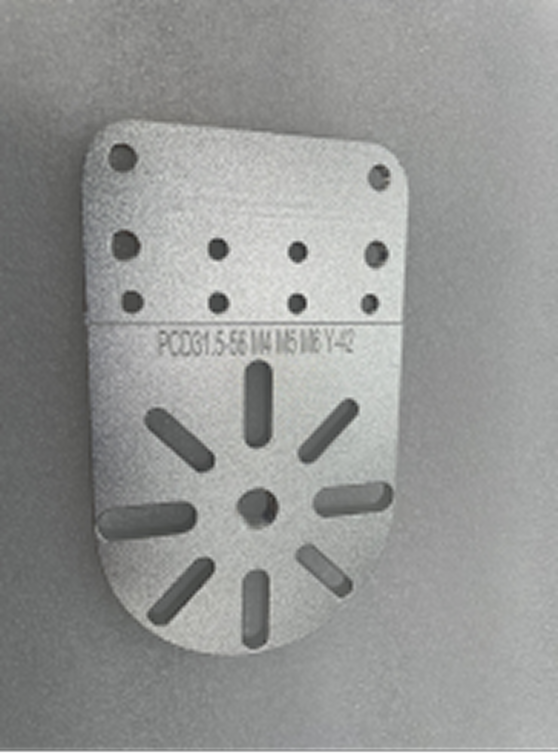
机器人法兰是指安装在机器人手臂末端的一个标准接口,用于连接各种工具或设备。在3D视觉引导应用中,为了方便将标定板安装在机器人末端,梅卡曼德提供如下规格型号的机器人法兰。请根据实际机器人的法兰盘尺寸,选择合适的法兰盘连接件。
| 图片 | 型号 | 尺寸(mm) |
|---|---|---|
|
机器人法兰小号(RF-S) |
106 x 64 x 5 |

|
机器人法兰中号(RF-M) |
174 x 120 x 8 |

|
机器人法兰大号(RF-L) |
296 x 240 x 8 |
选择机器人通信方式
接口通信通常适用于产线上的实际应用,提供更灵活的功能以及更快的抓取节拍。主控通信通常适用于项目的测试阶段,用于快速验证抓取效果。
| 如果选择使用接口通信方式,且需要使用Mech-Viz获取规划路径,需要获取Mech-Viz软件授权。 |
确定是否使用深度学习
请参考选择深度学习方案章节确定该视觉方案是否需要使用深度学习。
| 如果视觉方案需要使用深度学习辅助识别,需要获取Mech-DLK软件授权。 |
当视觉识别过程中,3D匹配方法无法很好解决以下问题时,需考虑使用深度学习:
| 序号 | 传统方法劣势场景 | 图示 |
|---|---|---|
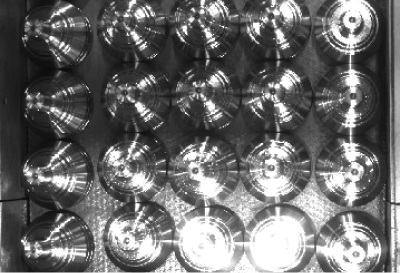
1 |
工件表面高度反光,点云质量较差。 |
|
2 |
工件点云上的几何特征较少,特征点云点数较少。 |
|
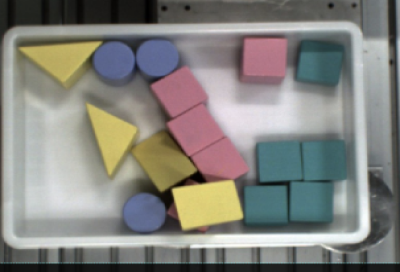
3 |
工件之间有序摆放,且紧密贴合时,不易识别出单个工件的点云,或者错误识别单个工件的点云。 |
|
4 |
工件特征仅存在于彩色图上,工件点云特征丢失。 |
|
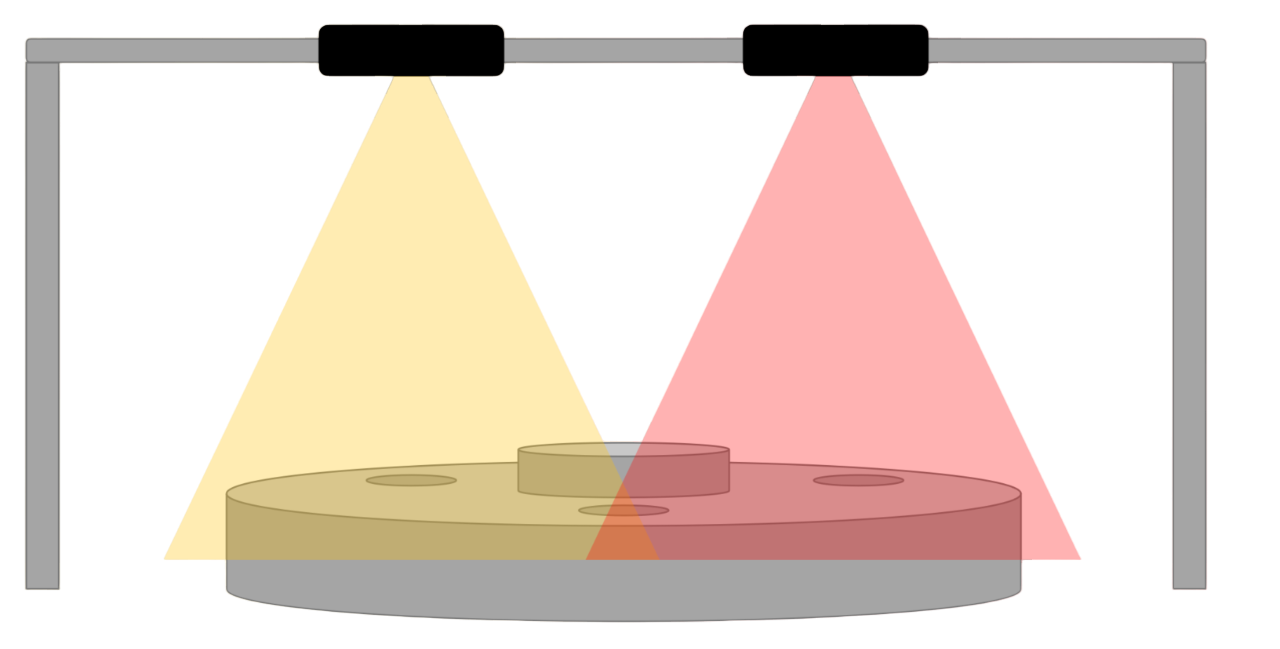
5 |
项目对视觉节拍的要求较高。例如工件数量多时,点云模板匹配时间较长。通过深度学习先筛选一批工件,然后再进行匹配,可以缩短匹配所需时间。 |
|



确认项目精度要求
在设计视觉方案时,需要先确认项目的精度要求(例如±3mm),确定应用的精度预期和目标。通常情况下,抓取精度±3~5mm可以满足常见项目要求。
对于高精度(例如±1mm)场景,推荐部署视觉系统漂移自校正方案,不仅能减少相机温漂导致的精度误差,还能保证3D视觉系统的可靠性和运行稳定性。
如果要部署视觉系统漂移自校正方案,需要购买梅卡曼德提供的标定球产品,并获取“视觉系统漂移自校正”功能授权。
确认软件许可形式以及所需产品和功能授权
梅卡曼德使用Sentinel LDK作为软件的许可系统。该许可系统支持软件授权装置、软件授权码两种加密形式。请联系梅卡曼德确认需要使用的授权形式。
为了确保视觉方案能够正常运行,获取的软件授权装置或软件授权码应包含相应的产品或功能授权。
| 产品/功能授权 | 说明 |
|---|---|
Mech-Vision 2.0+ |
必选产品授权。运行Mech-Vision 2.0+软件时,需获取该授权。 |
Mech-Viz 2.0+ |
可选产品授权。如果选择使用接口通信方式,且需要使用Mech-Viz获取规划路径,则需获取该授权。 |
Mech-DLK Pro-Train 2.6+ |
如果需要通过Mech-DLK软件训练深度学习模型,并通过Mech-Vision软件进行深度学习推理,则需获取Mech-DLK Pro-Train 2.6+授权。 |
视觉系统漂移自校正工具 |
可选功能授权。在高精度(例如±1mm)场景,且需要部署系统漂移自校正方案时,需获取该授权。 |
确定工作环境要求
在设计视觉方案时,确保各组件在适宜的环境条件下工作至关重要。这不仅影响系统的性能,还直接关系到硬件的使用寿命和可靠性。
在安装和使用视觉系统前,全面确认各视觉系统硬件对环境条件的具体要求,包括但不限于以下几个方面:
-
环境温度
确认硬件设备(主要是相机和工控机)的工作温度范围,确保其在环境温度范围内正常运行。必要时,可采用空调、加热器或隔热材料调节环境温度。
-
环境湿度
确认硬件设备(主要是相机和工控机)的工作湿度范围。防止设备因高湿度引发结露、腐蚀或短路。
-
抗振
根据《GB/T 39005-2020 工业机器人视觉集成系统通用技术要求》标准,视觉系统应能够在频率为5 ~55 Hz、振幅0.15 mm的振动条件下正常运行。
梅卡曼德3D相机的振动耐性及冲击耐性符合该标准要求。有关相机振动耐性及冲击耐性的具体信息,请参考相机技术参数。
请确保视觉系统的工作环境振动强度不超过上述标准要求。如相机持续承受超出该范围的振动,可能导致其性能下降。严重超出该范围的振动可能导致相机损坏或生产线停工。对此类情况,梅卡曼德不承担任何责任。
-
灰尘和污染物防护
梅卡曼德相机具备较高的防护等级,能有效防止灰尘或颗粒物进入设备。
为了保证成像质量,需要定期清洁相机机身和镜头。
-
电磁干扰
确保设备安装位置远离强电磁干扰源(如大型电机、无线通信设备等),以避免丢帧、深度图缺失等数据采集异常问题。