调整位姿(指向参考点)
本教程将首先介绍将位姿方向指向参考点的应用场景和应用示例,然后以“调整位姿(指向参考点)”教学示例工程为例介绍调整位姿V2步骤参数调节方法,最后介绍实际应用时的注意事项。
应用示例
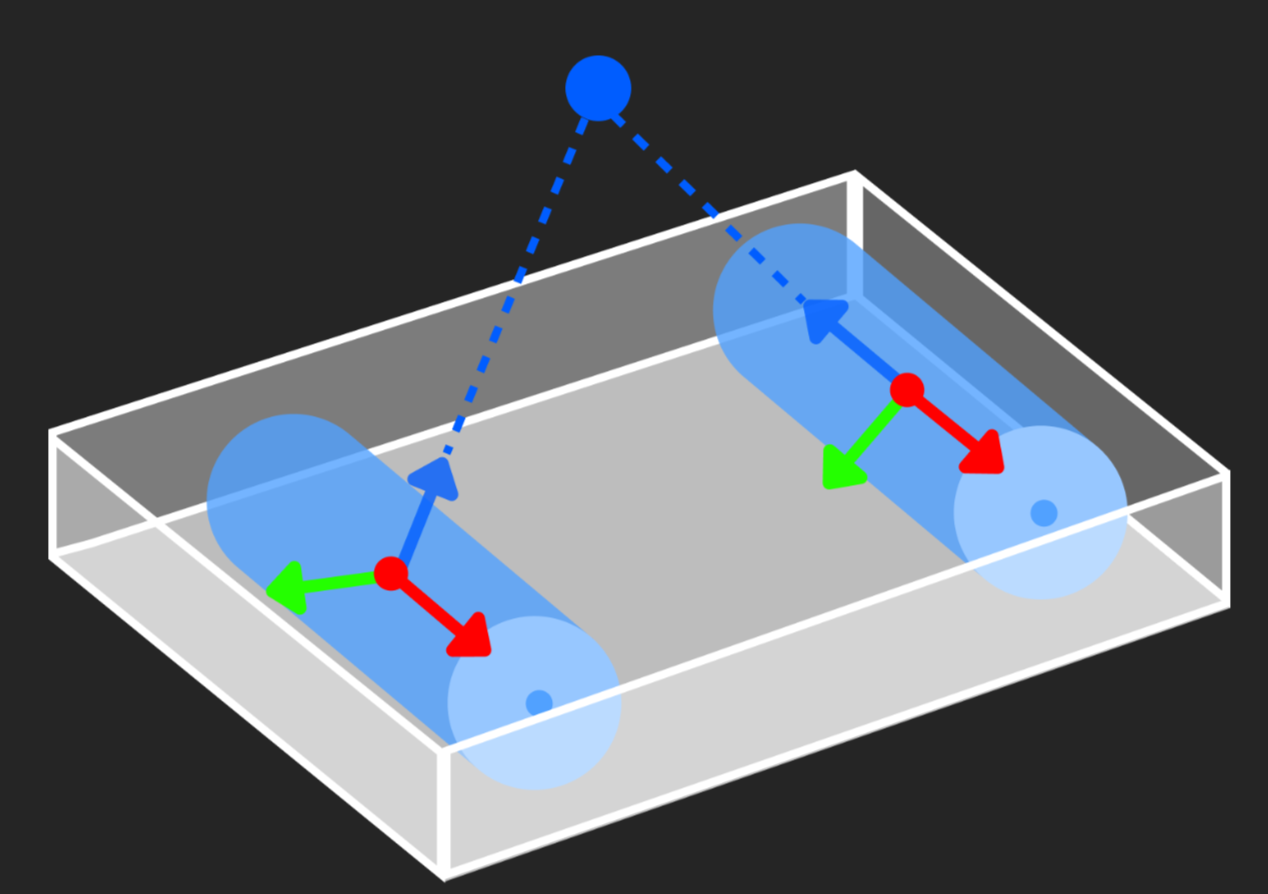
将位姿方向指向参考点适用于轴棒上料的场景,当抓取料筐侧壁附近的工件时,因夹具会与料筐发生碰撞,需要使轴棒位姿Z轴统一指向特定的点(即参考点),并对轴棒到参考位姿的距离进行排序,再按顺序进行抓取。
将位姿方向指向参考点后,机器人抓取效果如下图所示。
下文将基于该示例介绍实际应用指导和应用注意事项。
应用指导
了解将位姿方向指向参考点的应用场景后,如有使用需求,可前往案例库下载相关工程,并结合下文内容学习如何调节参数。
“调整位姿(指向参考点)”工程位于Mech-Vision案例库中,你可在教学示例分组下获取并创建该工程。创建工程后,单击选中调整位姿V2步骤,然后单击配置向导按钮,打开位姿调整工具并了解如何调节参数。该过程包括位姿调整、位姿规则和通用设置三个流程。

-
位姿调整:对位姿进行方向调整。
-
位姿规则:根据实际需求,对位姿进行排序,并且可过滤不满足要求的位姿。
-
通用设置:可对位姿处理以外的操作进行设置,当前支持对与位姿一一对应的其他数据(例如纸箱尺寸)进行重排序。
下文将对各流程中需调节的重点参数进行介绍。
位姿调整
-
选择方向调整方式。
为了使物体位姿统一指向参考点,需将方向调整设置为指向参考点。
-
设置参考位姿。
为调整位姿朝向,需设置参考位姿。参考位姿设置方法可参考设置参考位姿。在本教学示例工程中,需设置为通过拖拽器设置,利用该拖拽器调整抓取方向。
-
设置指向轴和固定轴。
在本教程中,需将需要指向的的轴设置为Z轴,需要固定的轴设置为X轴。在实际场景中,请根据工件的对称性设置需要指向的轴和需要固定的轴。
-
设置旋转角度步长。
抓取过程中为保证抓取精度、优化工件对称性和减少误差,可适当调整旋转角度步长的值。轴棒上料场景中需要时轴棒位姿尽可能指向参考点,因此需调整该参数的值。
位姿调整流程配置完成后,即可单击下一步按钮,进入位姿规则配置页面。
位姿规则
-
选择排序类型。
由于轴棒上料场景中需先抓取中心位置的工件,因此建议将排序类型设置为按位姿到参考位姿的距离排序。该方式能够计算所有输入位姿到参考位姿的距离,并按照距离的远近对位姿进行排序。
-
设置参考位姿。
为确定抓取起点,需设置参考位姿。参考位姿设置方法可参考设置参考位姿。本教学示例工程中由于轴棒上料场景中的料筐位置固定,因此选择使用通过拖拽器设置方式设置参考位姿。
-
设置排序方式。
将排序方式设置为升序,即按位姿到参考位姿的距离从小到大排序,方便后续抓取。
位姿规则配置完成后,即可单击下一步按钮进入通用设置页面。
应用注意事项
实际应用时,需了解并遵循以下注意事项,然后在自己的工程内添加调整位姿V2步骤并连接数据流,快速实现按照轴棒位姿到参考位姿的距离从小到大排序。
-
调整位姿V2步骤之前需连接用于识别和输出工件中心位姿的步骤或步骤组合,如读取工件位姿步骤组合。该类步骤或步骤组合的位姿输出端口用于连接调整位姿V2步骤的位姿输入端口,用于位姿排序。
-
调整位姿V2步骤后需连接其他位姿输入类步骤,例如路径规划、输出步骤,以输出调整后的位姿,从而使机器人按照轴棒到参考位姿的距离抓取轴棒。