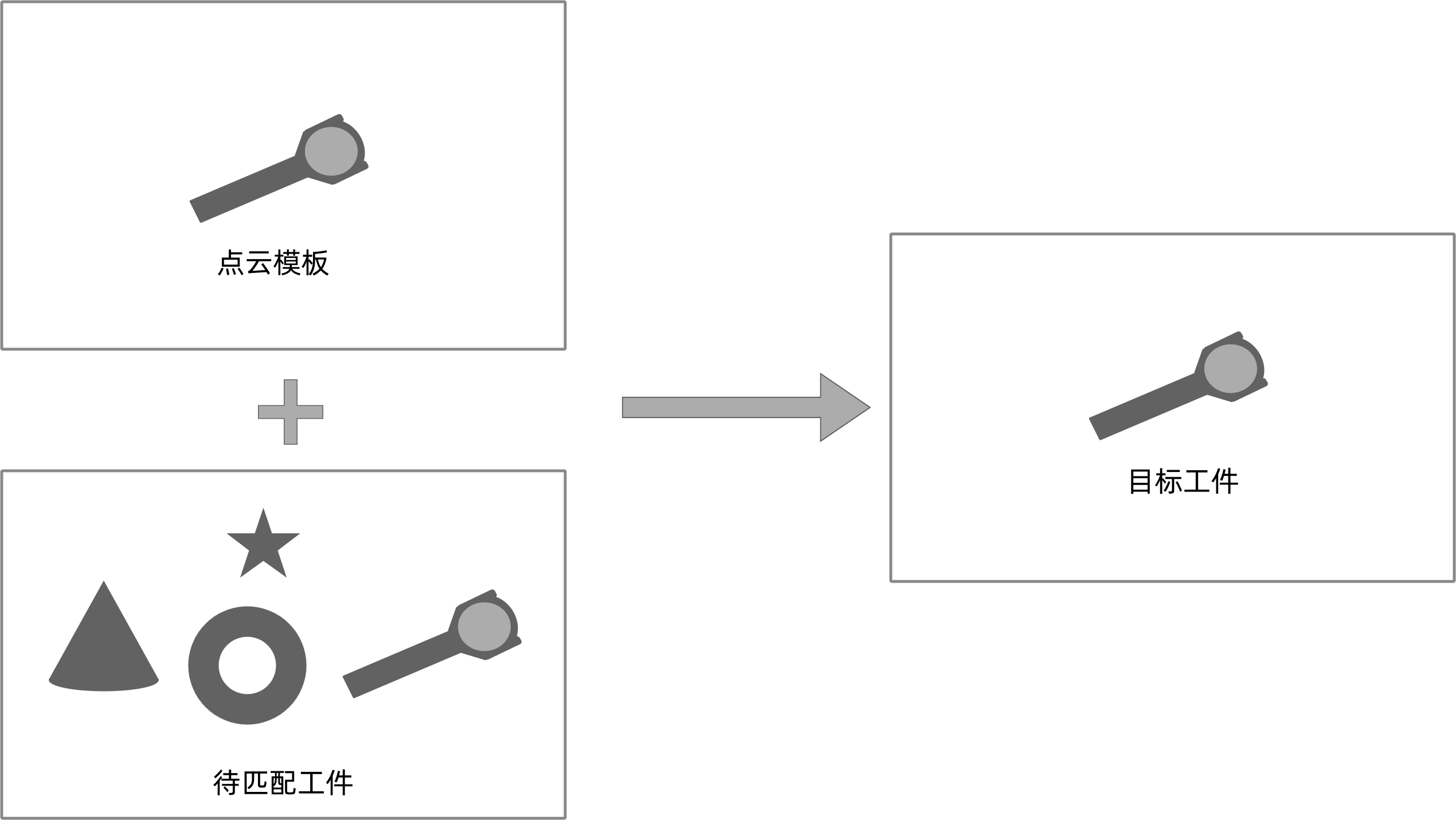
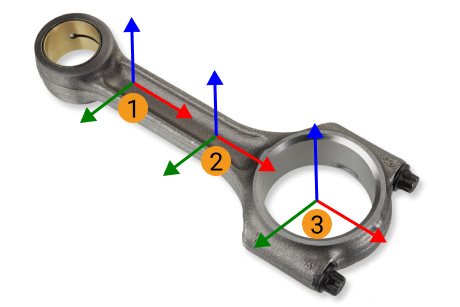
点云模板与抓取点介绍 您正在查看最新版本(V2.1.0)的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 在学习点云模板与抓取点制作方法之前,需了解什么是点云模板和抓取点,以及二者在点云模板匹配过程中发挥的作用。 什么是点云模板 在匹配过程中,点云模板是指预先定义的点云,该点云可体现工件的形状、结构和特征等,用于与输入的点云进行匹配,找到最佳的对应关系,最终匹配得到目标工件。 如下图所示,利用点云模板与待识别工件进行匹配,得到了目标工件。 点云模板既可以描述整个工件,也可以只描述工件的一部分。为了让点云模板在匹配过程中更好的发挥作用,点云模板应具有如下特点: 点云模板中的点云分布均匀,数量合理,以避免影响匹配速度。 点云模板应包括工件的典型特征,以便在匹配过程中能够准确识别出工件。 点云模板应避免存在无关点云等干扰因素,以保证匹配的稳定性和准确性。 什么是抓取点 抓取点代表工件上可以被机器人抓取的位置。抓取点位于工件坐标系下,其位置和方向是相对于工件而言的。 一个工件可能有多个不同的抓取点,可将抓取点设置于工件点云内部、点云表面或工件点云附近,如下图所示。 专题:点云模板与抓取点制作 点云模板制作策略