抓取点制作策略
工件抓取点代表工件上可以被机器人抓取的位置。当工件支持以多种方式抓取时,特别是乱序场景下,建议在工件库中对工件配置不同的抓取策略,使不同摆放方式的工件在机器人可达范围内都可被抓取,以提高抓取成功率。
下文将介绍目前工件库支持的抓取策略。
配置多抓取点
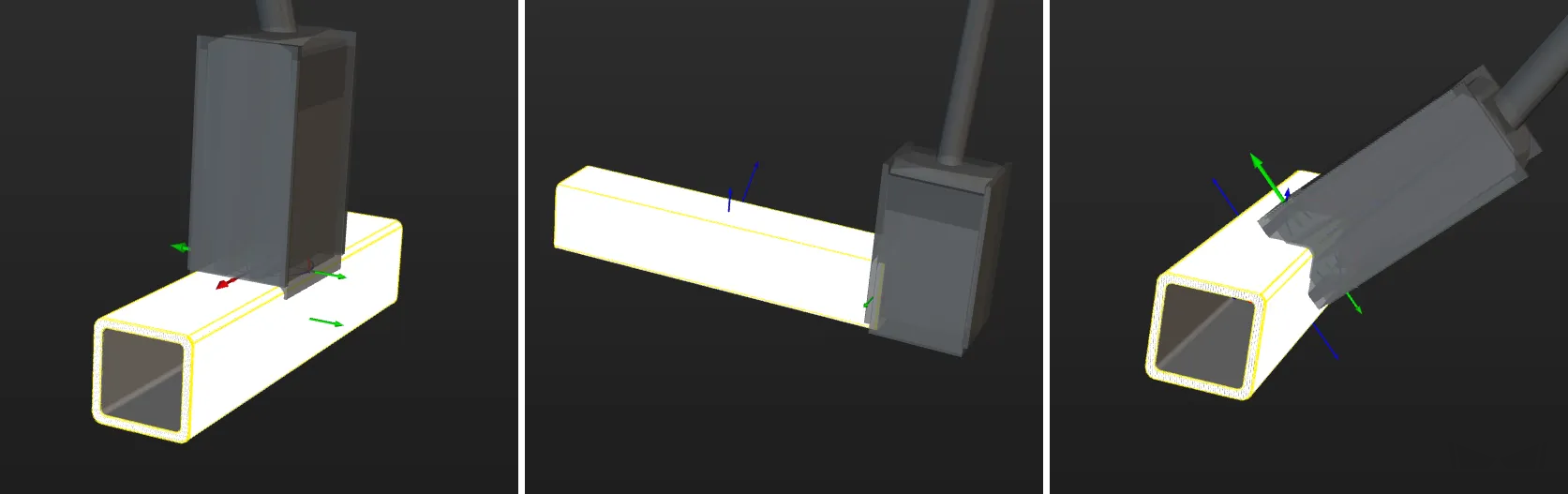
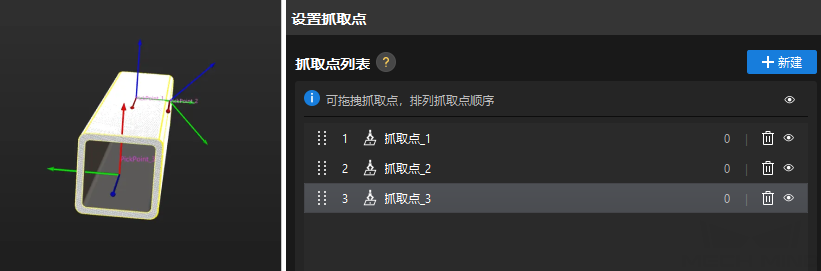
如下图所示,由于方管侧面、端面和棱边均可被磁吸夹具吸取,所以可在方管的上述三个位置设置抓取点。
配置多抓取点时,还可改变抓取点在抓取点列表中的位置,即向上或向下调整抓取点排序可以调整抓取点的优先级,实际抓取时,列表上方的抓取点将被优先考虑。
配置抓取点阵列
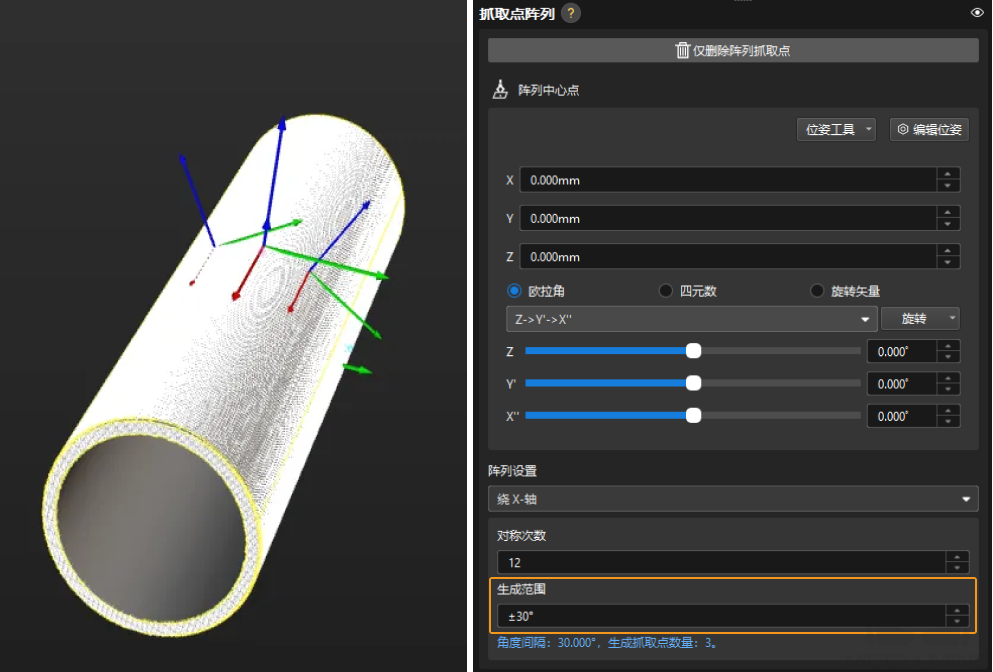
对于轴对称工件,可为其设置抓取点阵列。如下图所示,制作圆管点云模板时,抓取点阵列设置如下图所示。
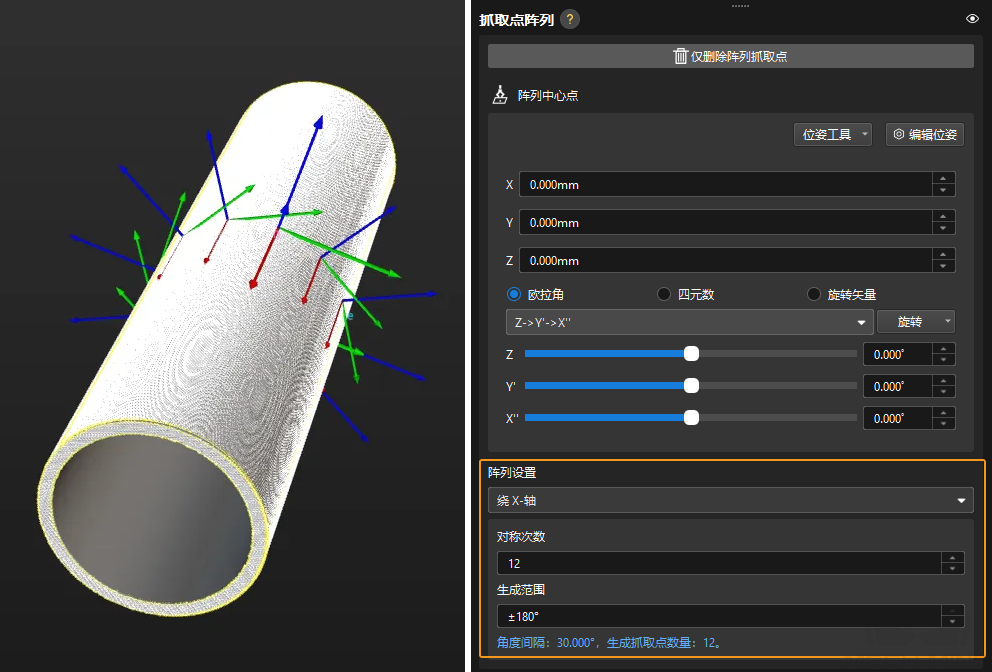
在实际应用中,Z轴朝下的抓取点大概率是无效的,且会影响路径规划,所以在配置抓取点阵列时应该缩小阵列的角度范围,通常推荐将该范围控制在±90°内。如下图所示,为乱序圆管配置抓取点阵列时,阵列抓取点角度范围为±30°,即可满足使用需求。
配置抓取裕度
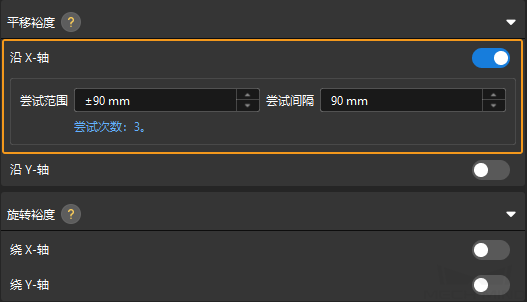
在实际抓取时,若希望抓取点沿某个方向发生位置或角度变化后夹具依然能够抓取工件,可在工件库中配置平移/旋转裕度,以进一步提升抓取成功率。如下图所示,夹具吸取圆管时,支持抓取点沿X轴方向平移。
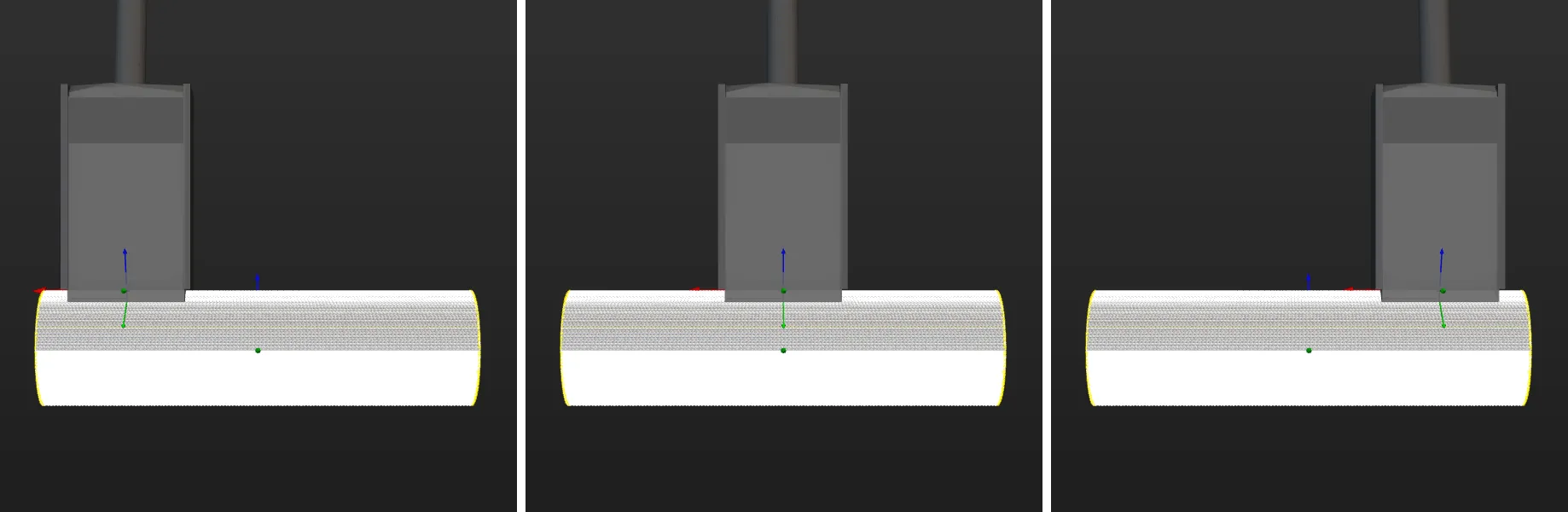
对应的工件库配置如下图所示。